1、前言
由于时间原因,我使用的遥控器是直接买的成品,富斯I6x+IA6B接收机,据说是一代神控,富斯的遥控器总共有ibus模式、sbus模式、PPM模式。我使用的是PPM模式。
2、什么是PPM
PPM信号其实就是很多个PWM信号综合到一起,形成一路PWM信号的形式叫做PPM信号。
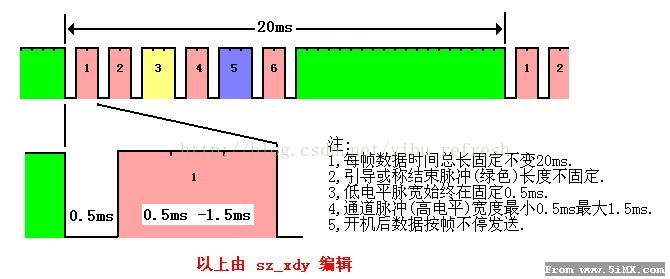
PPM信号一帧数据分为低电平(0.5ms)+高电平(0.5ms-1.5ms),高电平长度与PWM占空比成正比。因为一帧信号最多要2ms,信号周期为20ms,所以理论一次PPM信号可以发送10帧数据,但是由于要确定帧头信号,所以要加入同步帧,真正的PPM信号里面最多有9帧数据帧。
3、读取PPM
根据PPM的发送原理,我们很轻易就可以想到通过测量电平的时间就可以获得PPM信号的数据帧。有两种方法(1)根据GPIO的高电平输入同时开始定时器计时,(2)使用TIM定时器的输入捕获功能。
因为无人机属于比较危险的玩具,一旦失去控制后果不堪设想,从安全角度出发我使用比较稳妥的定时器输入捕获方法。
4、程序设计
定时器输入捕获的初始化不在赘述,在stm32基础篇有详细介绍。直接看PPM信号的接收,存储。
uint16_t PPM_Sample_Cnt=0;
uint32_t PPM_Time=0;
uint16_t PPM_Okay=0;
uint16_t PPM_Databuf[8]={0};
uint8_t TIM2_CH2_CAPTURE_STA=0;
/**
* 功能:TIM2_ch1中断服务函数,接收PPM信号储存在PPM_Databuf中
* 入口参数:
* 返回值:
*/
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_CC2)==!RESET)//捕获中断
{
if(TIM2_CH2_CAPTURE_STA&0x01)//符合条件的话说明上次捕获了高电平,那么这次捕获的一定是低电平
{
PPM_Time=TIM_GetCapture2(TIM2);
if(PPM_Time>0)
PPM_Time++;
if(PPM_Okay==1)
{
PPM_Databuf[PPM_Sample_Cnt]=PPM_Time;
PPM_Sample_Cnt++;
if(PPM_Sample_Cnt>8)
PPM_Okay=0;
}
if(PPM_Time>7000)//识别到帧尾
{
PPM_Okay=1;
PPM_Sample_Cnt=0;
}
TIM_OC2PolarityConfig(TIM2,TIM_ICPolarity_Rising);
TIM2_CH2_CAPTURE_STA=0;//清掉标志位准备开始下一次上升沿和下降沿检测
}
else
{
TIM_SetCounter(TIM2,0);//以上为清零
TIM2_CH2_CAPTURE_STA|=0x01;//高电平指示被赋值
TIM_OC1PolarityConfig(TIM2,TIM_ICPolarity_Falling); //当捕获上升沿后改为捕获下降沿
}
}
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2|TIM_IT_Update); //清除中断标志位,一定不要忘,要不然下次进不了中断
}
因为PPM信号最长为2ms,但是空白数据帧会超过2ms,所以我们只需要判断有一个数据超过2ms即可认定为是上一次PPM信号的最后一帧,即刻开始接收最新的PPM信号的第一帧,因为我的遥控器是十通道,但是我还用不到这么多,所以设计接收八通道,预留两个通道备用。
最后接收到的PPM数据帧储存在PPM_Databuf[8]这个数组中。
5、总结
PPM信号是现在多通道控制领域比较常见的一种串行信号,但是它也有一个重大的缺点,就是最快需要20ms才能接收一次数据。这也就是信号频率只有50Hz。对于一些高精度仪器不可用,ibus和sbus是并行多通道数据传输方案,在频率上优于PPM,所以后期可以升级信号模式。
最后
以上就是阳光月饼最近收集整理的关于STM32 四轴无人机设计——遥控器PPM信号的全部内容,更多相关STM32内容请搜索靠谱客的其他文章。








发表评论 取消回复