第1部分 硬件介绍
1.1 硬件清单
| 序号 | 品名 | 数量 |
|---|---|---|
| 1 | MKSESC 4.12主板 | 1 |
| 2 | USB数据线 | 1 |
| 3 | DC 36V电源 | 1 |
| 4 | 6.5寸轮毂电机 | 1 |
| 5 | MKS ESC_RC V1.0遥控器 | 1 |
| 6 | MKS ESC_RC Receiver V1.0接收器 | 1 |
硬件清单如下图所示。

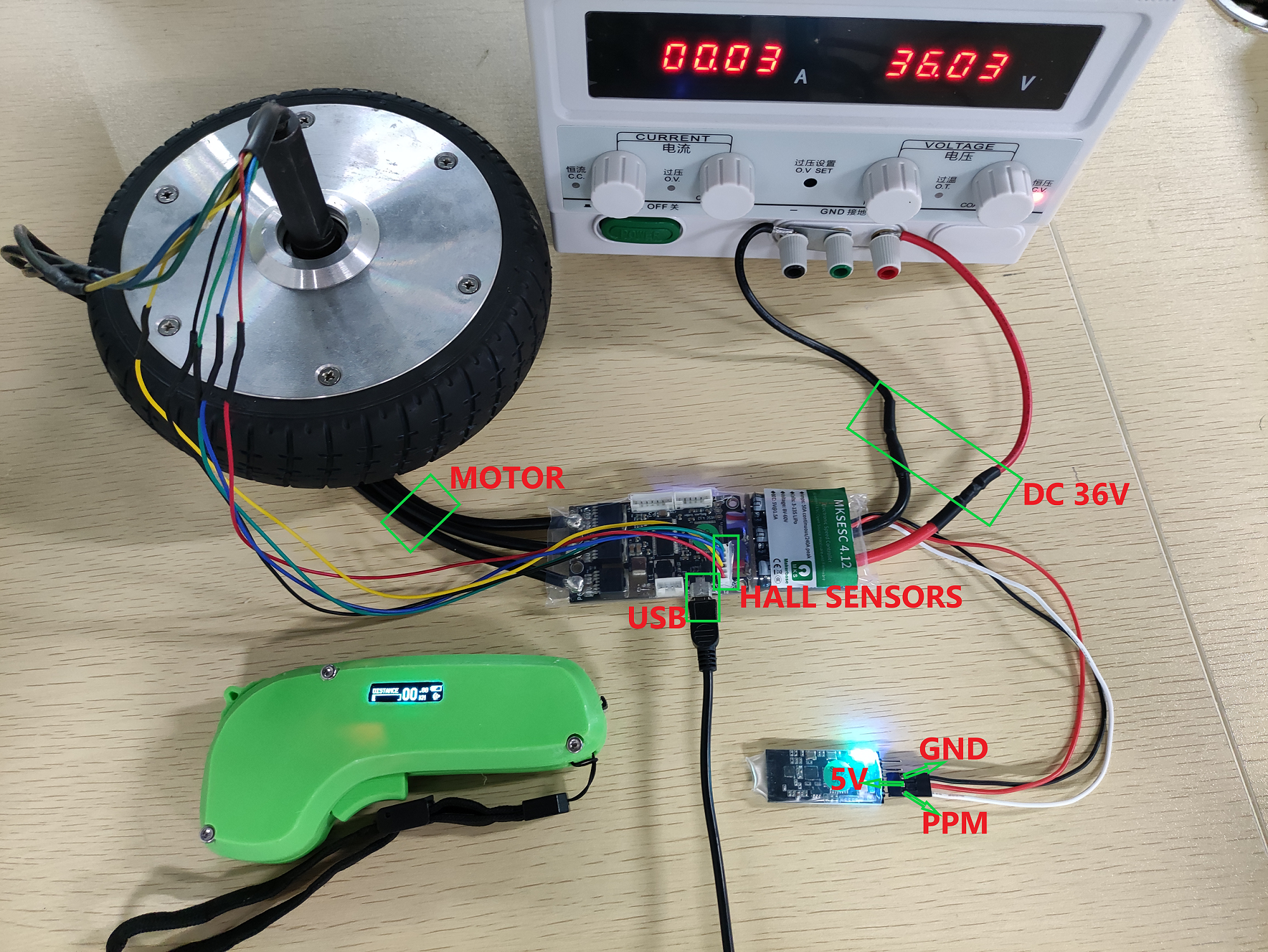
1.2 硬件连接
- 将电机三相线接入VESC的三相线;
- 将编码器连接线接入VESC的SENSE接口;
- 将USB线一端连接VESC主板,另一端连接PC。
- MKS ESC_RC Receiver V1.0接收器引脚与VESC主板引脚连接关系,如下表格所示。
| 序号 | MKS ESC_RC Receiver V1.0接收器 | MKSESC 4.12主板 |
|---|---|---|
| 1 | PPM | S |
| 2 | GND | - |
| 3 | 5V | 5V |
-
将DC36V电源连接主板电源接口,上电后MKS ESC_RC Receiver V1.0接收器电源绿灯亮,蓝灯闪烁。
-
开启MKS ESC_RC V1.0遥控器的电源开关,信号图标闪烁,遥控器将自动与接收器匹配。
-
匹配成功后,遥控器信号图标停止闪烁,接收器蓝灯常亮,如下图所示。

-
硬件连接如下图所示:
第2部分 连接并设置电机
具体操作请参考VESC基本测试教学文档。
-
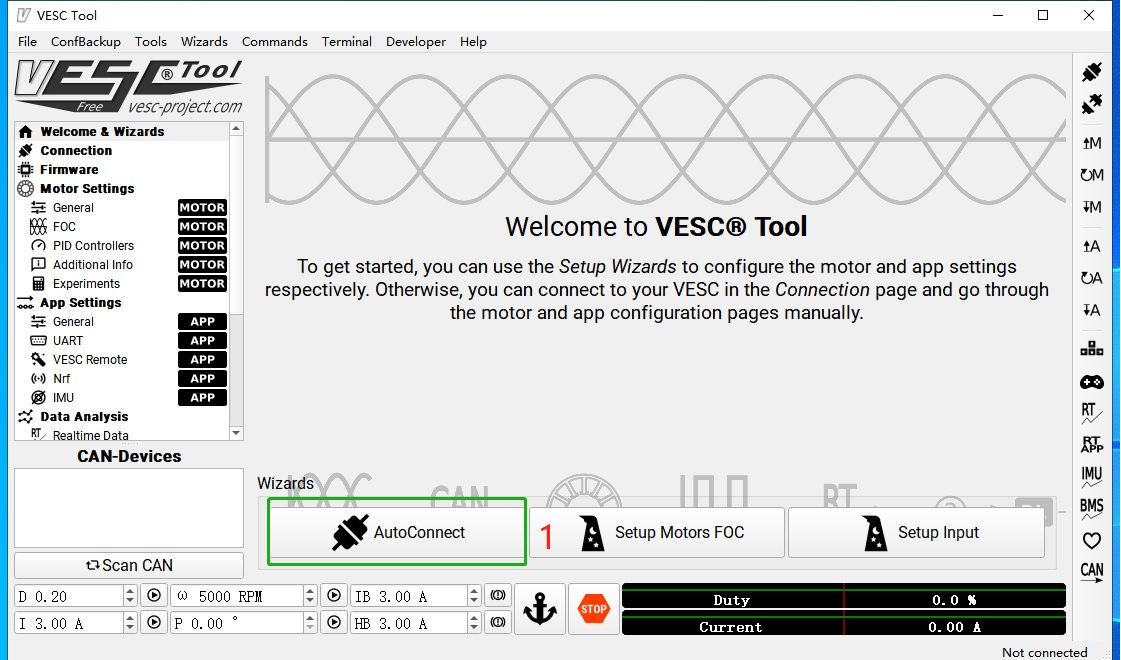
点击AutoConnect连接VESC主板,如下图1所示。
-
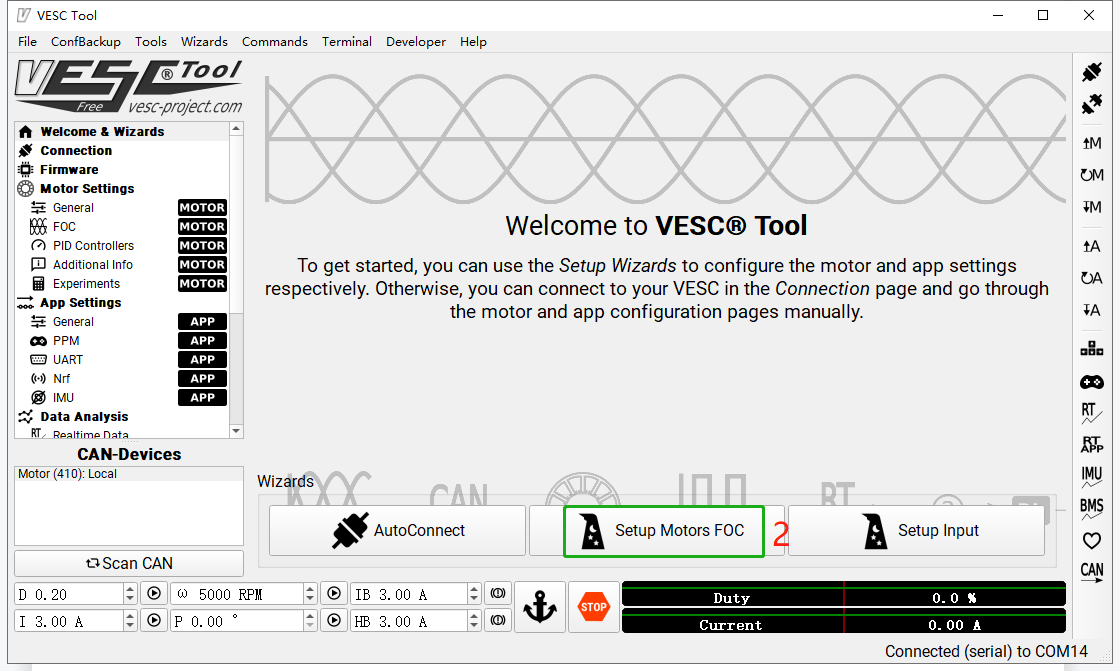
点击Setup Motors FOC,配置电机FOC,如下图2所示。
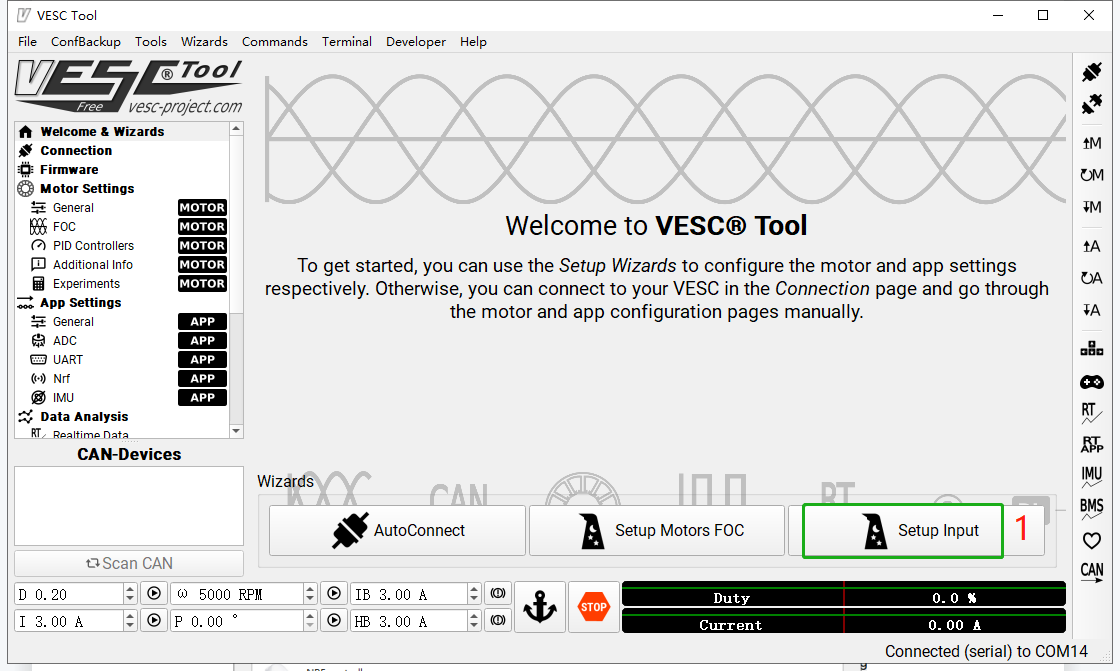
第3部分 设置输入
-
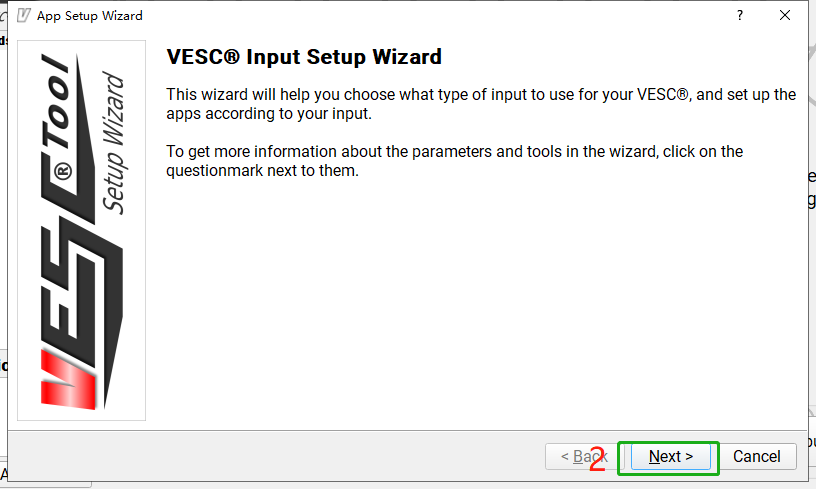
点击Setup Input,如下图1所示。
-
点击Next,如下图2所示。
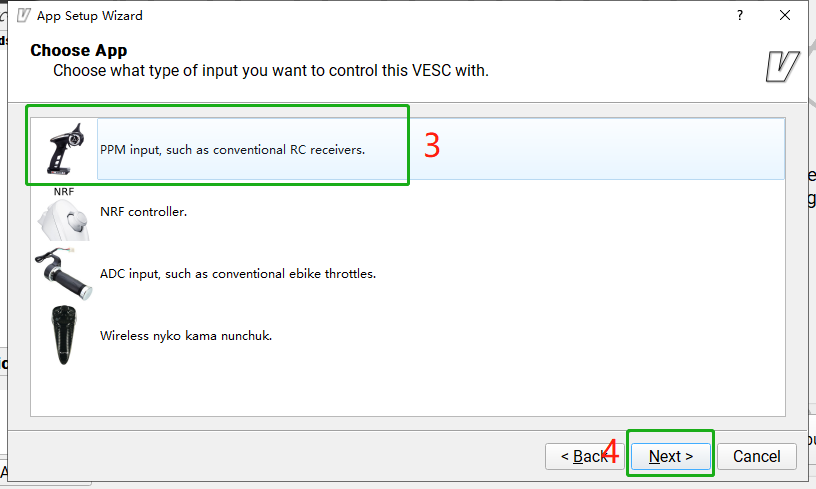
-
选择输入模式,如下图3所示;点击Next>,如下图4所示。
-
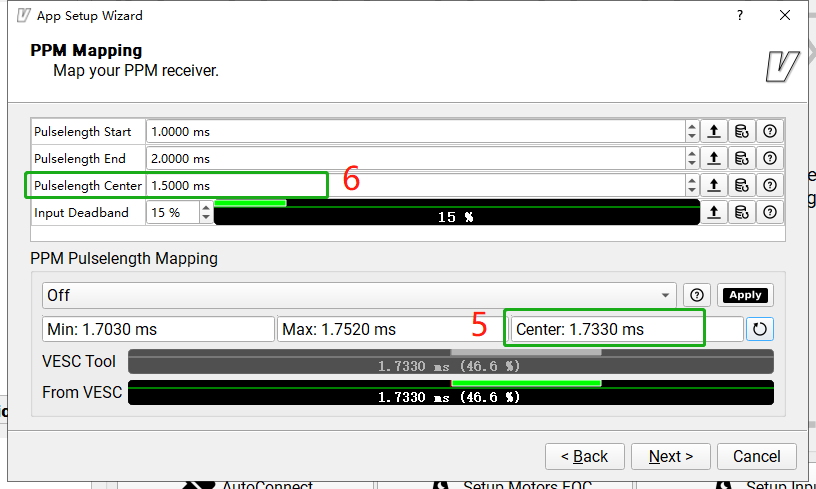
使遥控器滚轮处于中间位置。
将Center中的数值(1.7330),填入Pulselength Center中,如下图5,6所示。
-
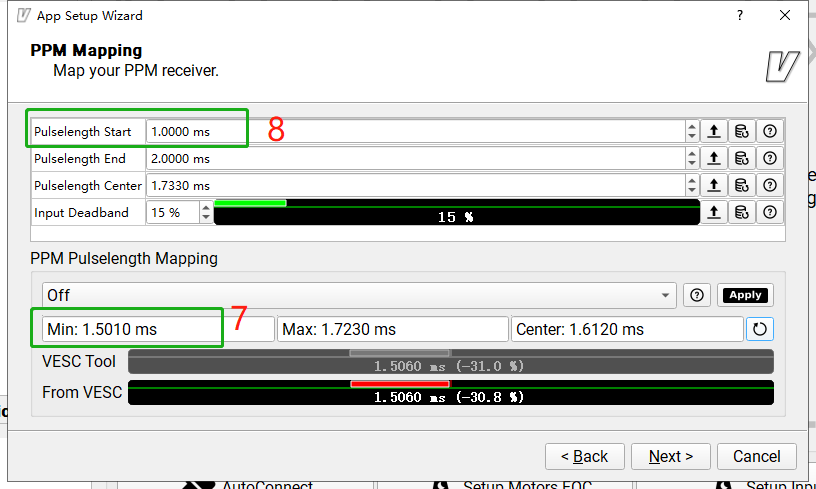
将遥控器滚轮前推到最顶端。
将Min中的数值(1.5010),填入Pulselength Start中,如下图7,8所示。
-
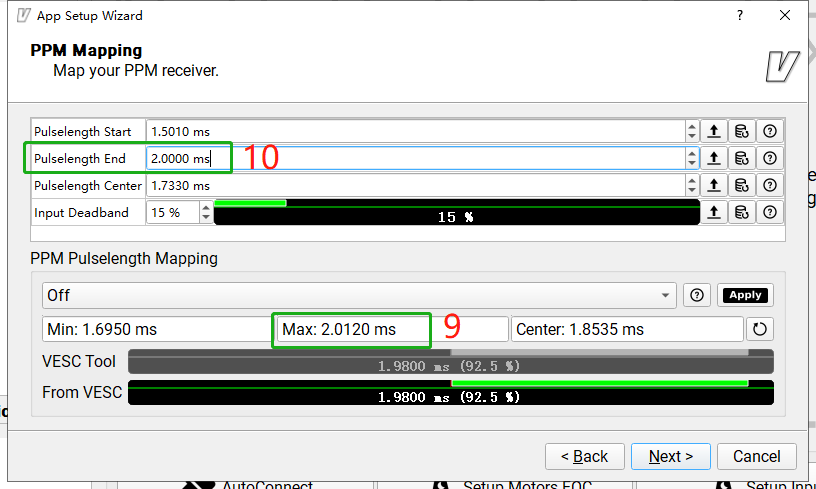
将遥控器滚轮下拉到最底端。
将Max中的数值(2.0120),填入Pulselength End中,如下图9,10所示。
-
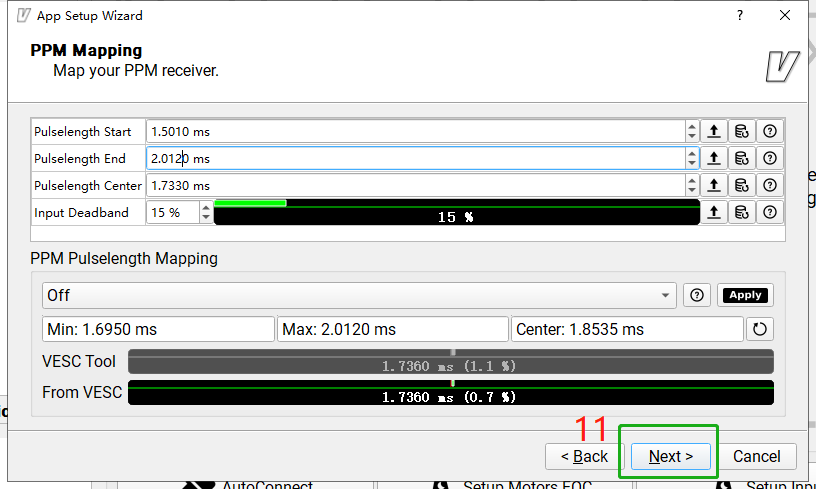
配置RC完成,点击Next>,如下图11所示。
-
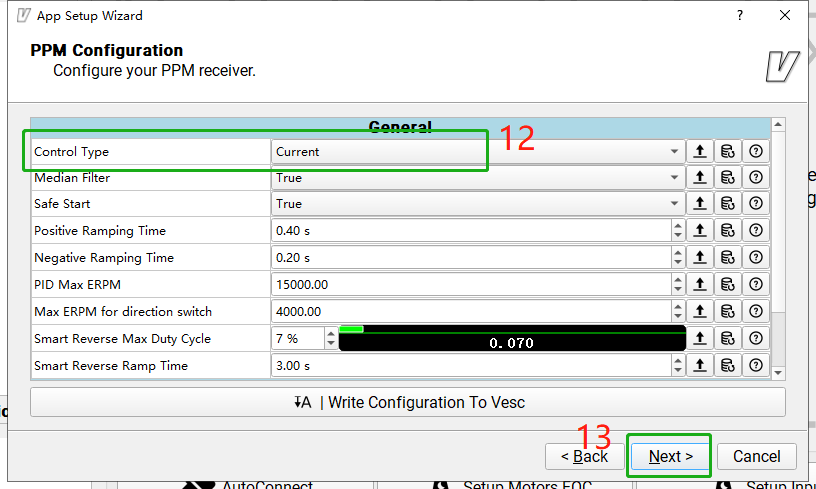
在Control Type中选择Current控制模式,如下图12所示。
-
点击Next>,如下图13所示。
-
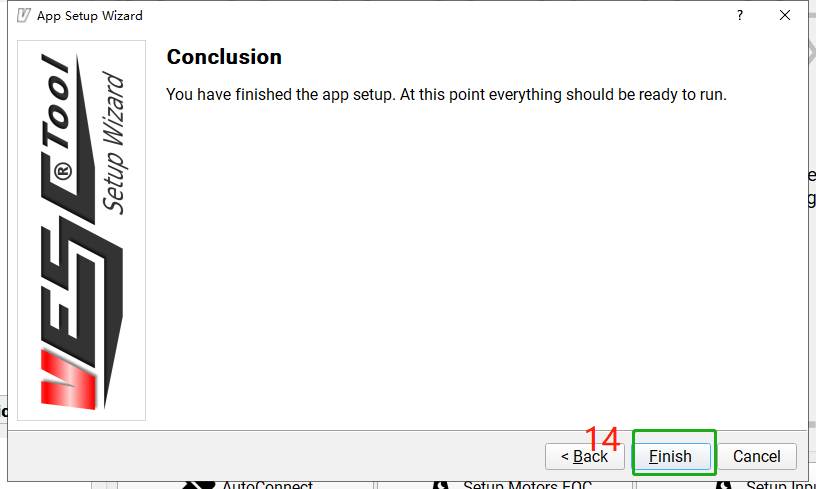
点击Finish完成设置,如下图14所示。
第4部分 APP设置
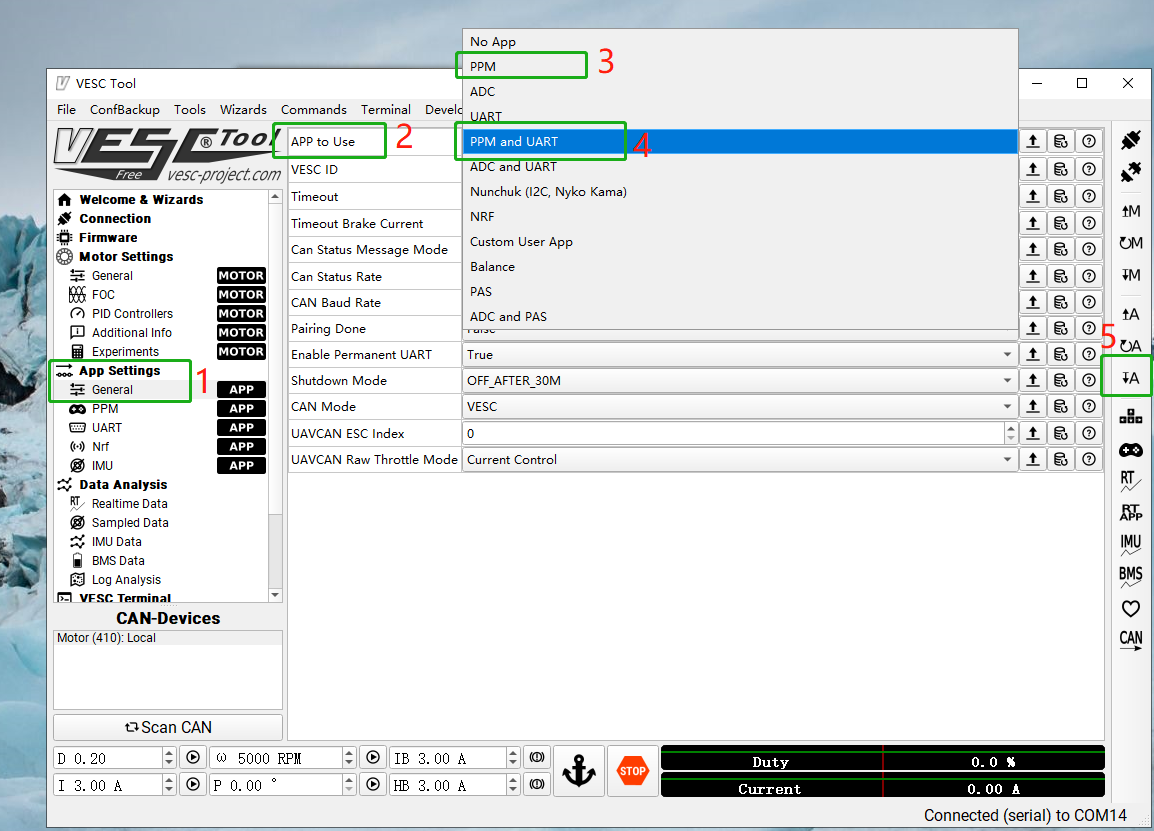
- 点击App Settings中的General,如下图1所示;
- 在APP to Use中选择PPM and UART或者PPM,如下图2,3,4所示;
- 点击↓A将配置写入VESC,如下图5所示。
第5部分 RC控制电机
5.1 控制电机正向加速
将遥控器滚轮上拉,控制电机正转,上拉大小决定电机正转速度。
5.2 控制电机反向加速/刹车
将遥控器滚轮下拉,控制电机反向/刹车,下拉大小决定电机反转速度。
至此,RC PPM遥控测试完成。
创客基地 Makerbase VESC 第五课 RC PPM遥控测试 到此结束。
欢迎加入 创客基地 电机控制Q群 讨论电机控制相关问题:732557609
欢迎光临 创客基地 B站 了解技术资料:https://space.bilibili.com/393688975
欢迎光临 创客基地 淘宝店 采购产品:
https://makerbase.taobao.com/
最后
以上就是合适烧鹅最近收集整理的关于Makerbase VESC 第五课 RC PPM遥控测试第1部分 硬件介绍第2部分 连接并设置电机第3部分 设置输入第4部分 APP设置第5部分 RC控制电机的全部内容,更多相关Makerbase内容请搜索靠谱客的其他文章。








发表评论 取消回复