一、串口介绍
串口设置包含:开启串口时钟、设置响应的IO口模式、设置波特率、数据位长度、奇偶校验位、DMA等信息。
具体参看:STM32开发 – 串口详解
二、函数
1、串口参数初始化,并使能串口。
HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart);
该函数只有一个入口参数 huart,为UART_HandleTypeDef 结构体指针类型,我们俗称其为串口句柄,它的使用会贯穿整个串口程序。一般情况下,我们会定义一个UART_HandleTypeDef 结构体类型全局变量,然后初始化各个成员变量。
结构体UART_HandleTypeDef 定义:
/**
* @brief UART handle Structure definition
*/
typedef struct __UART_HandleTypeDef
{
USART_TypeDef *Instance; /*!< UART registers base address */
UART_InitTypeDef Init; /*!< UART communication parameters */
uint8_t *pTxBuffPtr; /*!< Pointer to UART Tx transfer Buffer */
uint16_t TxXferSize; /*!< UART Tx Transfer size */
__IO uint16_t TxXferCount; /*!< UART Tx Transfer Counter */
uint8_t *pRxBuffPtr; /*!< Pointer to UART Rx transfer Buffer */
uint16_t RxXferSize; /*!< UART Rx Transfer size */
__IO uint16_t RxXferCount; /*!< UART Rx Transfer Counter */
DMA_HandleTypeDef *hdmatx; /*!< UART Tx DMA Handle parameters */
DMA_HandleTypeDef *hdmarx; /*!< UART Rx DMA Handle parameters */
HAL_LockTypeDef Lock; /*!< Locking object */
__IO HAL_UART_StateTypeDef gState; /*!< UART state information related to global Handle management
and also related to Tx operations.
This parameter can be a value of @ref HAL_UART_StateTypeDef */
__IO HAL_UART_StateTypeDef RxState; /*!< UART state information related to Rx operations.
This parameter can be a value of @ref HAL_UART_StateTypeDef */
__IO uint32_t ErrorCode; /*!< UART Error code */
} UART_HandleTypeDef;
该结构体成员变量非常多,一般情况下下载调用函数HAL_UART_Init对串口进行初始化的时候,我们只需要先设置Instance和Init两个成员变量的值。
Instance 是 USART_TypeDef 结构体指针类型的变量,它是执行寄存器基地址,实际上这个基地址HAL库已经定义好了,如果是串口1,取值为USART1即可。
Init是UART_InitTypeDef 结构体类型变量,它是用来设置串口的各个参数,包括波特率、停止位等。
UART_InitTypeDef 结构体定义如下:
typedef struct
{
uint32_t BaudRate; /*!< This member configures the UART communication baud rate.
The baud rate is computed using the following formula:
- IntegerDivider = ((PCLKx) / (8 * (OVR8+1) * (huart->Init.BaudRate)))
- FractionalDivider = ((IntegerDivider - ((uint32_t) IntegerDivider)) * 8 * (OVR8+1)) + 0.5
Where OVR8 is the "oversampling by 8 mode" configuration bit in the CR1 register. */
uint32_t WordLength; /*!< Specifies the number of data bits transmitted or received in a frame.
This parameter can be a value of @ref UART_Word_Length */
uint32_t StopBits; /*!< Specifies the number of stop bits transmitted.
This parameter can be a value of @ref UART_Stop_Bits */
uint32_t Parity; /*!< Specifies the parity mode.
This parameter can be a value of @ref UART_Parity
@note When parity is enabled, the computed parity is inserted
at the MSB position of the transmitted data (9th bit when
the word length is set to 9 data bits; 8th bit when the
word length is set to 8 data bits). */
uint32_t Mode; /*!< Specifies whether the Receive or Transmit mode is enabled or disabled.
This parameter can be a value of @ref UART_Mode */
uint32_t HwFlowCtl; /*!< Specifies whether the hardware flow control mode is enabled or disabled.
This parameter can be a value of @ref UART_Hardware_Flow_Control */
uint32_t OverSampling; /*!< Specifies whether the Over sampling 8 is enabled or disabled, to achieve higher speed (up to fPCLK/8).
This parameter can be a value of @ref UART_Over_Sampling */
} UART_InitTypeDef;
BaudRate: 为串口波特率,用来确定串口通信的速率 。
WordLength: 为字长,可以设置8位字长或者9位字长。我们设置为 8 位字长数据格式 UART_WORDLENGTH_8B。
StopBits: 为停止位,可以设置为1个停止位或者2个停止位。我们设置为1个停止位 UART_STOPBITS_1。
Parity: 为是否需要奇偶校验,我们设定为无奇偶校 UART_PARITY_NONE。
Mode: 为串口模式,可以设置为只收模式、只发模式或者收发模式。我们设置为全双工收发模式 UART_MODE_TX_RX。
HwFlowCtl: 为是否支持硬件流控制,我们设置为无硬件流控制 UART_HWCONTROL_NONE。
pTxBuffPtr, TxXferSize 和 TxXferCount 三个变量分别用来设置串口发送的数据缓存指针,发送的数据量和还剩余的要发送的数据量。
pRxBuffPtr, RxXferSize 和RxXferCount 三个变量则是用来设置接收的数据缓存指针,接收的最大数据量以及还剩余的要接收的数据量。
hdmatx 和 hdmarx 是串口 DMA 相关的变量,指向 DMA 句柄。
函数 HAL_UART_Init 使用的一般格式为:
UART_HandleTypeDef UART1_Handler; //UART 句柄
UART1_Handler.Instance=USART1; //USART1
UART1_Handler.Init.BaudRate=115200; //波特率
UART1_Handler.Init.WordLength=UART_WORDLENGTH_8B; //字长为 8 位格式
UART1_Handler.Init.StopBits=UART_STOPBITS_1; //一个停止位
UART1_Handler.Init.Parity=UART_PARITY_NONE; //无奇偶校验位
UART1_Handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //无硬件流控
UART1_Handler.Init.Mode=UART_MODE_TX_RX; //收发模式
HAL_UART_Init(&UART1_Handler); //HAL_UART_Init()会使能 UART1
需要说明的是,函数HAL_UART_Init内部会调用串口使能函数使能相应串口,所以调用了该函数之后我们就不需要重复使能串口了。当然,HAL库也提供了具体的串口使能和失能的方法,具体使用方法如下:
__HAL_UART_ENABLE(handler); //使能句柄 handler 指定的串口
__HAL_UART_DISABLE(handler); //关闭句柄 handler 指定的串口
这里还需要注意,串口作为一个重要的外设,在调用的初始化函数HAL_UART_Init内部,会先调用MSP初始化回调函数进行MCU相关的初始化,函数为:
void HAL_UART_MspInit(UART_HandleTypeDef *huart);
我们的程序中,只需要重写该函数即可。一般情况下,该函数内部用来编写IO初始化,时钟使能以及NVIC配置。
2、使能串口和GPIO时钟
我们要使用串口,所以我们必须使能串口时钟和使用到的GPIO口的时钟。具体方法:
__HAL_RCC_USART1_CLK_ENABLE(); //使能 USART1 时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能 GPIOA 时钟
3、GPIO口初始化设置,以及复位映射配置
参看:STM32F4 HAL库开发 – GPIO
4、开启串口相关中断,配置串口中断优先级
__HAL_UART_ENABLE_IT 使能串口中断的标识符。
示例:
__HAL_UART_ENABLE_IT(huart,UART_IT_RXNE); //开启接收完成中断
第一个参数:为串口句柄,类型为UART_HandleTypeDef 结构体类型。
第二个参数:为我们要开启的中断类型值。
#define UART_IT_PE ((uint32_t)(UART_CR1_REG_INDEX << 28U | USART_CR1_PEIE))
#define UART_IT_TXE ((uint32_t)(UART_CR1_REG_INDEX << 28U | USART_CR1_TXEIE))
#define UART_IT_TC ((uint32_t)(UART_CR1_REG_INDEX << 28U | USART_CR1_TCIE))
#define UART_IT_RXNE ((uint32_t)(UART_CR1_REG_INDEX << 28U | USART_CR1_RXNEIE))
#define UART_IT_IDLE ((uint32_t)(UART_CR1_REG_INDEX << 28U | USART_CR1_IDLEIE))
有开启中断就有关闭中断,操作方法为:
__HAL_UART_DISABLE_IT(huart,UART_IT_RXNE); //关闭接收完成中断
对于中断优先级配置,参考方法为:
HAL_NVIC_EnableIRQ(USART1_IRQn); //使能 USART1 中断通道
HAL_NVIC_SetPriority(USART1_IRQn,3,3); //抢占优先级 3,子优先级 3
5、编写中断服务函数
串口1中断服务函数为:
void USART1_IRQHandler(void) ;
当发生中断的时候,程序就会执行中断服务函数。然后我们在中断服务函数中编写相应的逻辑代码即可。
6、串口数据接收和发送
HAL 库操作 USART_DR 寄存器发送数据的函数是:
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart,
uint8_t *pData, uint16_t Size, uint32_t Timeout);
通过该函数向串口寄存器 USART_DR 写入一个数据。
HAL 库操作 USART_DR 寄存器读取串口接收到的数据的函数是:
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart,
uint8_t *pData, uint16_t Size, uint32_t Timeout);
通过该函数可以读取串口接受到的数据。
7、DMA配置
参看:STM32F4 HAL库开发 – DMA
三、STM32CubeMX 配置串口
1、配置
打开 Pinout选项卡界面,左侧依次进入 Categories->Connectivity->USART1 配置栏。
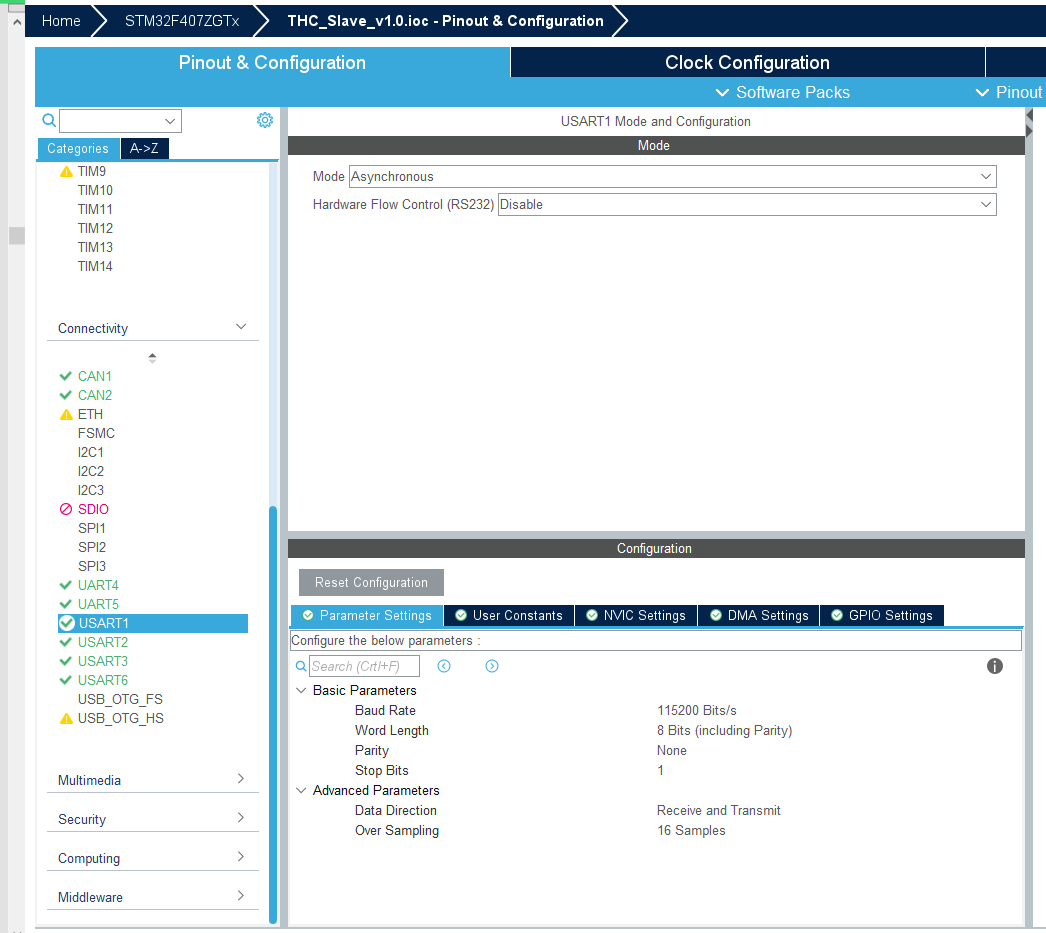
配置栏有2个选项
**Mode:**用来设置串口的模式或者关闭串口
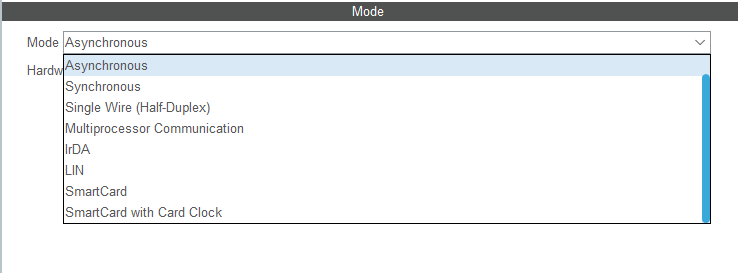
Asynchronous:异步
Synchronous:同步
Single Wire(Half-Duplex):单线(半双工)
Multiprocessor Communication:多处理器通信
这里我们要开启串口的异步模式,选择Mode值为 Asynchronous。
Hardware Flow Control(RS232): 用来开启/关闭串口的硬件控制流。
该选项只有在Mode选项值为 Asynchronous(异步通信)模式的前提下才有效。
选择收发引脚:
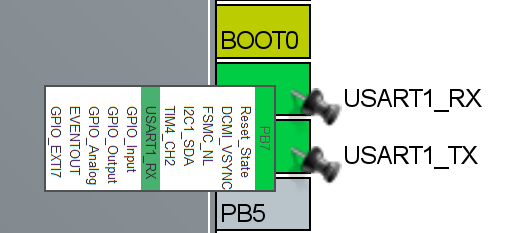
在GPIO->USART里就可以看到新添加的USART1_TX和USART1_RX。
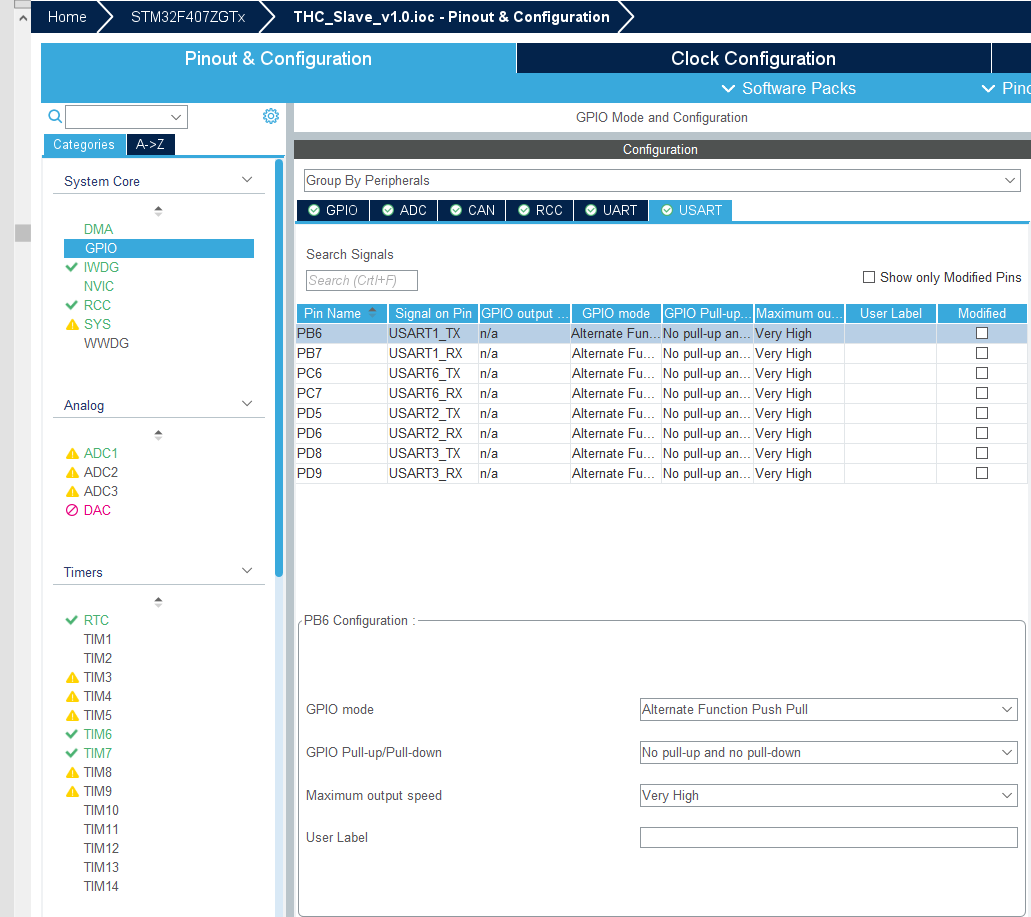
配置栏有一下几个选项:
GPIO mode:
Altemate Fuction Push Pull (复用推挽)
GPIO Pull-up/Pull-down:
Pull-up (上拉)
Maximum output speed:
Very High(速度)

再次打开进入 Categories->Connectivity->USART1 配置栏
下半部分可以看到:
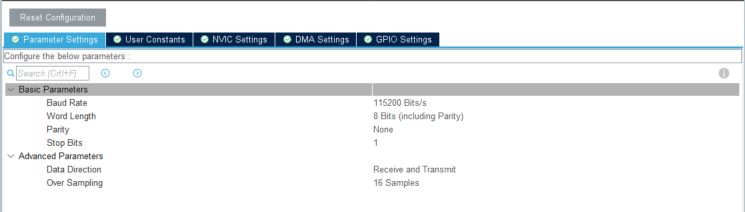
Parameter Settings:
包含波特率、数据位、奇偶校验位、停止位、使能收发模式、过采样等设置。
我们将 USART1 配置为:波特率 115200, 8 位字长模式,无奇偶校验位, 1 个停止位,发送/接收均开启。
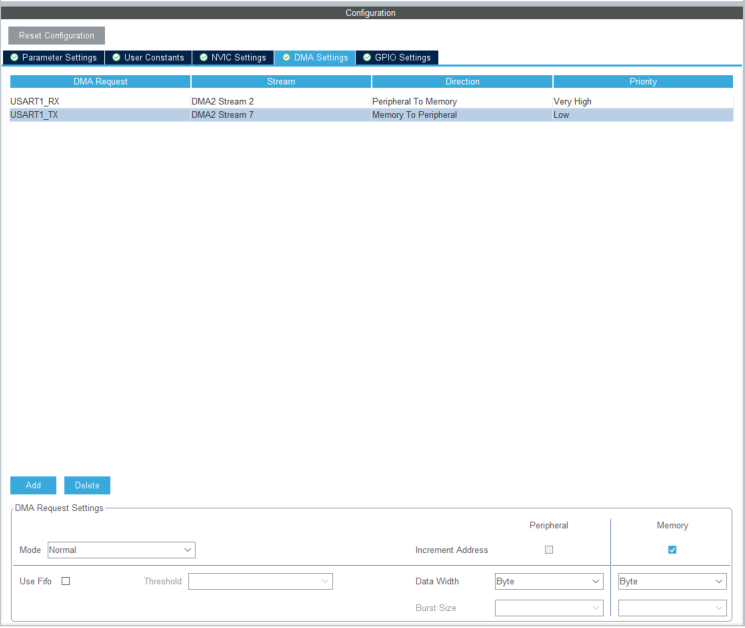
DMA settings:
可以点击Add,添加USART1_RX 和 USART1_TX。
可以选择,Priority 优先级。
在 DMA Request Settings,也可以进行设置。
NVIC Settings:
配置完DMA后,在打开NVIC Settings,就可以看到 DMA的使能是选中的。
这里我们勾选 USART1 global interrupt 的中断使能。

2、生成源码
MX_USART1_UART_Init 函数
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
HAL_UART_MspInit 函数
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**USART1 GPIO Configuration
PB6 ------> USART1_TX
PB7 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USART1 DMA Init */
/* USART1_RX Init */
hdma_usart1_rx.Instance = DMA2_Stream2;
hdma_usart1_rx.Init.Channel = DMA_CHANNEL_4;
hdma_usart1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_usart1_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart1_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart1_rx.Init.Mode = DMA_NORMAL;
hdma_usart1_rx.Init.Priority = DMA_PRIORITY_VERY_HIGH;
hdma_usart1_rx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_usart1_rx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(uartHandle,hdmarx,hdma_usart1_rx);
/* USART1_TX Init */
hdma_usart1_tx.Instance = DMA2_Stream7;
hdma_usart1_tx.Init.Channel = DMA_CHANNEL_4;
hdma_usart1_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_usart1_tx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart1_tx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart1_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart1_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart1_tx.Init.Mode = DMA_NORMAL;
hdma_usart1_tx.Init.Priority = DMA_PRIORITY_VERY_HIGH;
hdma_usart1_tx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_usart1_tx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(uartHandle,hdmatx,hdma_usart1_tx);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
HAL_UART_MspDeInit 函数
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PB6 ------> USART1_TX
PB7 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_6|GPIO_PIN_7);
/* USART1 DMA DeInit */
HAL_DMA_DeInit(uartHandle->hdmarx);
HAL_DMA_DeInit(uartHandle->hdmatx);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
DMA中断:
void DMA2_Stream2_IRQHandler(void)
{
/* USER CODE BEGIN DMA2_Stream2_IRQn 0 */
/* USER CODE END DMA2_Stream2_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart1_rx);
/* USER CODE BEGIN DMA2_Stream2_IRQn 1 */
/* USER CODE END DMA2_Stream2_IRQn 1 */
}
void DMA2_Stream7_IRQHandler(void)
{
/* USER CODE BEGIN DMA2_Stream7_IRQn 0 */
/* USER CODE END DMA2_Stream7_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart1_tx);
/* USER CODE BEGIN DMA2_Stream7_IRQn 1 */
/* USER CODE END DMA2_Stream7_IRQn 1 */
}
中断和接收数据处理:
void USART1_IRQHandler(void)
{
THC_LiquidCooled_Handler();
}
void THC_LiquidCooled_Handler (void)
{
HAL_UART_IRQHandler(&DEF_UART_LIQUID);
if(RESET != __HAL_UART_GET_FLAG(&DEF_UART_LIQUID, UART_FLAG_IDLE))
{
__HAL_UART_CLEAR_IDLEFLAG(&DEF_UART_LIQUID); //清除标志位
HAL_UART_DMAStop(&DEF_UART_LIQUID);
METERComm.Rbuf_CNT = LIQUID_BUF_RXD_SIZE - __HAL_DMA_GET_COUNTER(&DEF_HDMA_LIQUID_RX);
HAL_UART_Receive_DMA(&DEF_UART_LIQUID,RLIQUIDBuf,LIQUID_BUF_RXD_SIZE);
}
}
void CheckLIQUID_RBuf_Fun(void)
{
if(LIQUIDComm.Rbuf_CNT != 0)
{
//判断帧头、帧尾、BCC校验
u16 LenBuf;
u16 onePackageLen = 0;
u16 onePackageBodyLen = 0;
int16_t onePackageBodyCrc = 0;
LenBuf = (LIQUIDComm.Rbuf_CNT & (LIQUID_BUF_RXD_SIZE - 1));
if ((RLIQUIDBuf[0] == 0x01) && (RLIQUIDBuf[1] == 0x03))
{
onePackageBodyLen = RLIQUIDBuf[2];
onePackageLen = onePackageBodyLen + 5; //包含 子机地址、功能码、读取字节数、CRC码
if( onePackageLen <= LenBuf )
{
onePackageBodyCrc=RLIQUIDBuf[onePackageLen-2] + ((RLIQUIDBuf[onePackageLen-1]<<8)&0xff00); //校验码反着的
if( onePackageBodyCrc == Check_CRC16(RLIQUIDBuf, onePackageBodyLen+3) )
{
THC_LIQUID_Receive(RLIQUIDBuf+3, onePackageBodyLen);
memset(RLIQUIDBuf,'�', LIQUID_BUF_RXD_SIZE); //收到一帧以后,清空buf
LIQUIDComm.Rbuf_CNT = 0;
}
}
}
}
}
四、485通讯
485通讯还需要有一个cs引脚配置。
// RS485 发送
#define LIQUID_RS485_T (HAL_GPIO_WritePin(LIQUIDCOOLED_GPIO_Port, LIQUIDCOOLED_485CK_Pin, GPIO_PIN_SET))
//RS485 接收
#define LIQUID_RS485_R (HAL_GPIO_WritePin(LIQUIDCOOLED_GPIO_Port, LIQUIDCOOLED_485CK_Pin, GPIO_PIN_RESET))
发送数据:
void LIQUID_RS485_Send_Data(u8 *pdata,u32 data_size)
{
LIQUID_RS485_T;//RS485 发送
HAL_UART_Transmit(&DEF_UART_LIQUID,pdata,data_size,1000);
LIQUID_RS485_R;//RS485 接收
}
五、使能
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); //uart使能idle中断
HAL_UART_Receive_DMA(&huart1,USART_RX_BUF1,USART_REC_LEN);//打开DMA接收,数据存入rx_buffer数组中。
六、接线
RS485:
RS485通信的时候,必须A接A,B接B,否则通信不正常。
RS232:
RS232通信的时候,Rx接Tx,Tx接Rx。
最后
以上就是瘦瘦缘分最近收集整理的关于STM32F4 HAL库开发 -- 串口一、串口介绍二、函数三、STM32CubeMX 配置串口四、485通讯五、使能六、接线的全部内容,更多相关STM32F4内容请搜索靠谱客的其他文章。








发表评论 取消回复