第三讲 Matlab/Simulink入门——离散系统仿真实例
- 1、离散系统基本概念
- 1.1 离散系统
- 1.2线性离散系统
- 1.3 Z变换
- 2、人口变化(例1)仿真
- 2.1 人口变化模型
- 2.2 建模
- 2.3 系统仿真
- 3、低通滤波器(例2)仿真
- 3.1 低通滤波器模型
- 3.2 建模
- 3.3 系统仿真
1、离散系统基本概念
1.1 离散系统
离散系统: 是指系统的输入和输出仅在离散的时间上取值,而且离散的时间具有相同的时间间隔,与连续的概念相反。
设系统输入变量为
u
(
n
T
s
)
,
n
=
0
,
1
,
2...
u(nT_s),n=0,1,2...
u(nTs),n=0,1,2...,其中
T
s
T_s
Ts为系统的采样时间,
n
n
n为采样时刻。由于
T
s
T_s
Ts为一固定值,因此系统输入
u
(
n
T
s
)
u(nT_s)
u(nTs),常简记为
u
(
n
)
u(n)
u(n)。设输出系统为
y
(
n
T
s
)
y(nT_s)
y(nTs),简记为
y
(
n
)
y(n)
y(n)。于是,离散系统的数学表达为:
y
(
n
)
=
f
(
u
(
n
)
,
u
(
n
−
1
)
,
.
.
.
;
y
(
n
−
1
)
,
y
(
n
−
2
)
)
y(n)=f(u(n),u(n-1),...;y(n-1),y(n-2))
y(n)=f(u(n),u(n−1),...;y(n−1),y(n−2))
1.2线性离散系统
线性离散系统: 是离散系统的一种特殊形式,需要同时满足(1)、(2)两个条件,即
T
{
α
u
1
(
n
)
+
β
u
2
(
n
)
}
=
α
T
{
u
1
(
n
)
}
+
β
T
{
u
2
(
n
)
}
Tlbrace alpha u_1(n)+beta u_2(n) rbrace = alpha Tlbrace u_1(n) rbrace + beta Tlbrace u_2(n) rbrace
T{αu1(n)+βu2(n)}=αT{u1(n)}+βT{u2(n)}
(1)、齐次性: 对于离散系统
y
(
n
)
=
T
{
u
(
n
)
}
,
n
=
0
,
1
,
2...
y(n)=Tlbrace u(n) rbrace, n=0,1,2...
y(n)=T{u(n)},n=0,1,2...,如果对任意的输入
u
(
n
)
u(n)
u(n)与给定的常数
α
alpha
α,下面的式子总成立:
T
{
α
u
(
n
)
}
=
α
T
{
u
(
n
)
}
Tlbrace alpha u(n) rbrace = alpha Tlbrace u(n) rbrace
T{αu(n)}=αT{u(n)}
则称系统满足齐次性。
(2)、叠加性: 对于系统对于输出
u
1
(
n
)
u_1(n)
u1(n)和
u
2
(
n
)
u_2(n)
u2(n),输出分别为
y
1
(
n
)
y_1(n)
y1(n) 和
y
2
(
n
)
y_2(n)
y2(n),总有下面的式子成立:
T
{
u
1
(
n
)
+
u
2
(
n
)
}
=
T
{
u
1
(
n
)
}
+
T
{
u
2
(
n
)
}
Tlbrace u_1(n)+u_2(n) rbrace = Tlbrace u_1(n) rbrace + Tlbrace u_2(n) rbrace
T{u1(n)+u2(n)}=T{u1(n)}+T{u2(n)}
则称系统满足叠加性。
对于线性离散系统,其一般数学描述为:
y
(
n
)
=
f
(
u
(
n
)
,
u
(
n
−
1
)
,
.
.
.
;
y
(
n
−
1
)
,
y
(
n
−
2
)
)
y(n)=f(u(n),u(n-1),...;y(n-1),y(n-2))
y(n)=f(u(n),u(n−1),...;y(n−1),y(n−2))
用差分方程描述为:
状态方程:
x
(
n
+
1
)
=
f
(
x
(
n
)
,
u
(
n
)
,
n
)
x(n+1)=f(x(n),u(n),n)
x(n+1)=f(x(n),u(n),n)
输出方程:
y
(
n
)
=
g
(
x
(
n
)
,
u
(
n
)
,
n
)
y(n)=g(x(n),u(n),n)
y(n)=g(x(n),u(n),n)
1.3 Z变换
Z
Z
Z变换: 对于一个离散信号
u
(
n
)
u(n)
u(n),其
Z
Z
Z变换为
U
(
z
)
=
∑
k
=
−
∞
∞
u
(
k
)
z
−
k
U(z)=displaystyle sum_{k=-infty}^{infty}{u(k)z^{-k}}
U(z)=k=−∞∑∞u(k)z−k。一般来说离散信号
u
(
n
)
u(n)
u(n)的起始时间往往大于零,这时它的
Z
Z
Z变换为
U
(
z
)
=
∑
k
=
0
∞
u
(
k
)
z
−
k
U(z)=displaystyle sum_{k=0}^{infty}{u(k)z^{-k}}
U(z)=k=0∑∞u(k)z−k,可简记为
U
(
z
)
=
Z
{
u
(
n
)
}
U(z)=Z lbrace u(n) rbrace
U(z)=Z{u(n)}。由离散信号的
Z
Z
Z变换确定离散信号的过程为
Z
Z
Z变换的你变换,一般简记为
U
(
z
)
=
Z
−
1
{
u
(
n
)
}
U(z)=Z^{-1} lbrace u(n) rbrace
U(z)=Z−1{u(n)}。
Z
Z
Z变换有以下两个重要性质:
(1)、线性关系:
Z
Z
Z变换同时满足齐次性和叠加性,即:
Z
{
α
u
1
(
n
)
+
β
u
2
(
n
)
}
=
α
Z
{
u
1
(
n
)
}
+
β
Z
{
u
2
(
n
)
}
Zlbrace alpha u_1(n)+beta u_2(n) rbrace = alpha Zlbrace u_1(n) rbrace + beta Zlbrace u_2(n) rbrace
Z{αu1(n)+βu2(n)}=αZ{u1(n)}+βZ{u2(n)}
(2)、设离散信号
u
(
n
)
u(n)
u(n)的
Z
Z
Z变换为
U
(
z
)
U(z)
U(z),则
u
(
n
−
1
)
u(n-1)
u(n−1)的
Z
Z
Z变换为
z
−
1
U
(
z
)
z^{-1}U(z)
z−1U(z)。
2、人口变化(例1)仿真
2.1 人口变化模型
【例1】设某一年的人口总数为
p
(
n
)
p(n)
p(n),其中
n
n
n表示年份,它与上一年的人口数目
p
(
n
−
1
)
p(n-1)
p(n−1)、人口自然增长率
r
r
r、以及新增资源所能满足的个体数目
K
K
K之间的关系方程如下差分方程,即:
p
(
n
)
=
r
p
(
n
−
1
)
[
1
−
p
(
n
−
1
)
K
]
p(n)=rp(n-1)[1-frac{p(n-1)}{K}]
p(n)=rp(n−1)[1−Kp(n−1)]
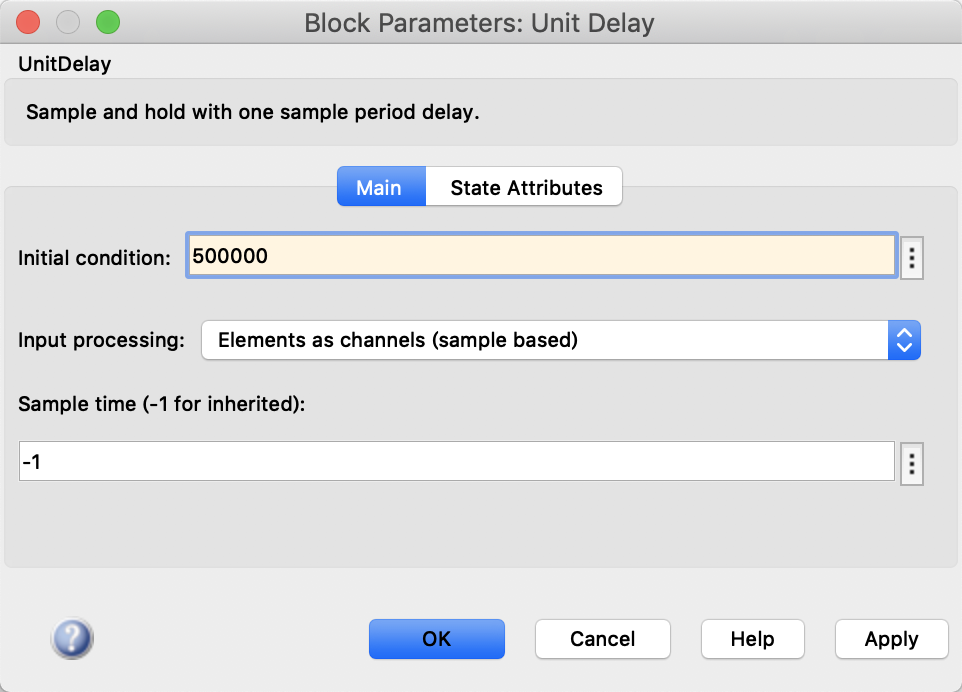
现设人口初值
p
(
0
)
p(0)
p(0)=500000,人口自然增长率
r
r
r=1.07,
K
K
K=2000000,建立人口动态变化的数学模型,分析人口数目的变化趋势。
2.2 建模
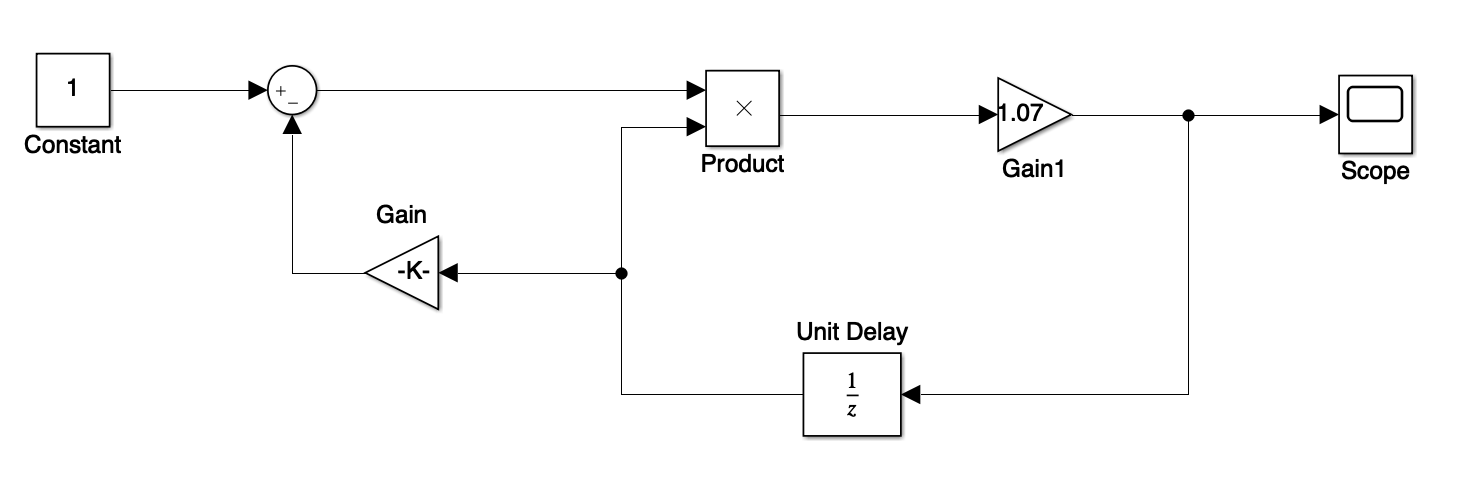
Gain模块:参数设置为1/2000000,即
1
K
frac{1}{K}
K1。
Gain1模块:增益设为1.07,即人口自然增长率。
Unit Delay模块:参数设置如图所示。
Constant模块:常数1。
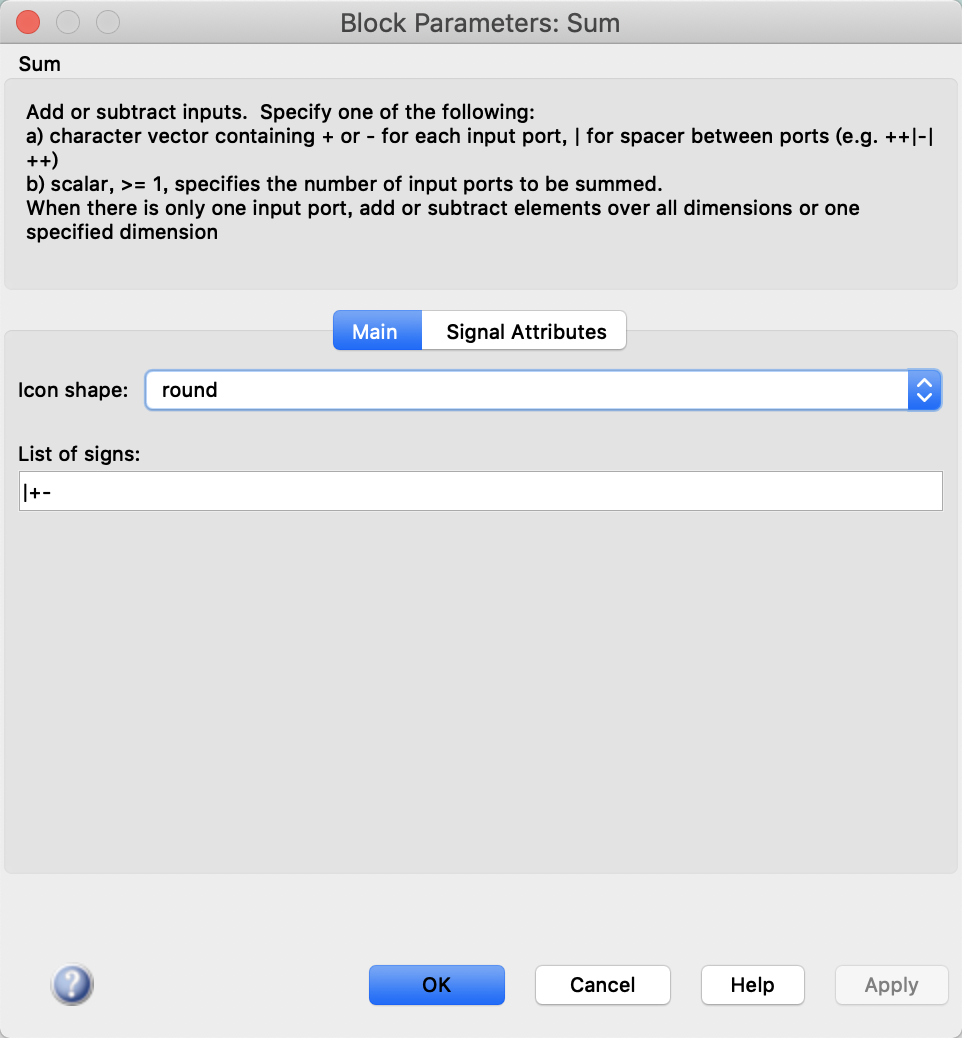
Sum模块:list of signs设置为| + -。
2.3 系统仿真
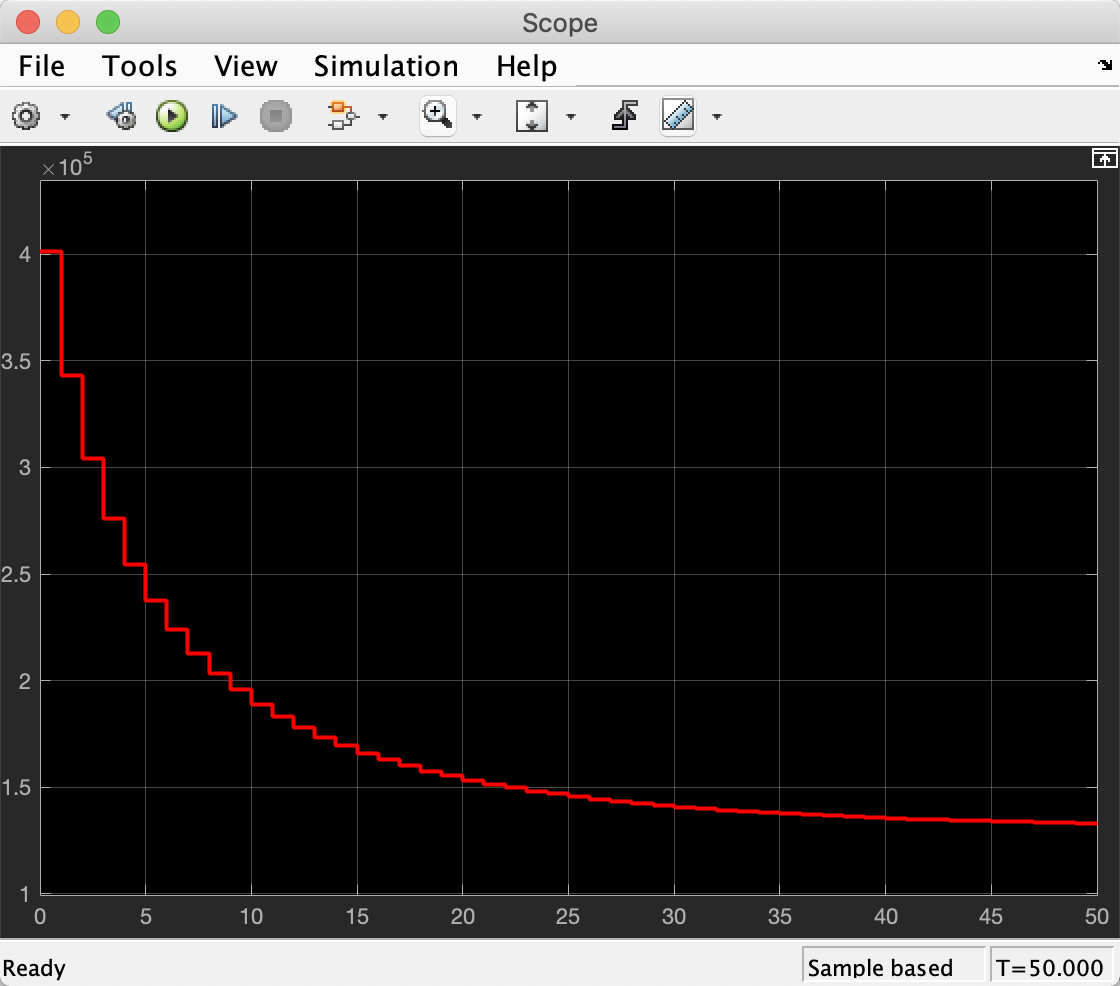
仿真时间设置为50s,步长默认(auto)也可以设置为其他。点击运行run,然后双击Scope模块,即可显示仿真结果。从仿真结果可以看出,人口数目会逐年减少,并趋于一个稳定值。
3、低通滤波器(例2)仿真
3.1 低通滤波器模型
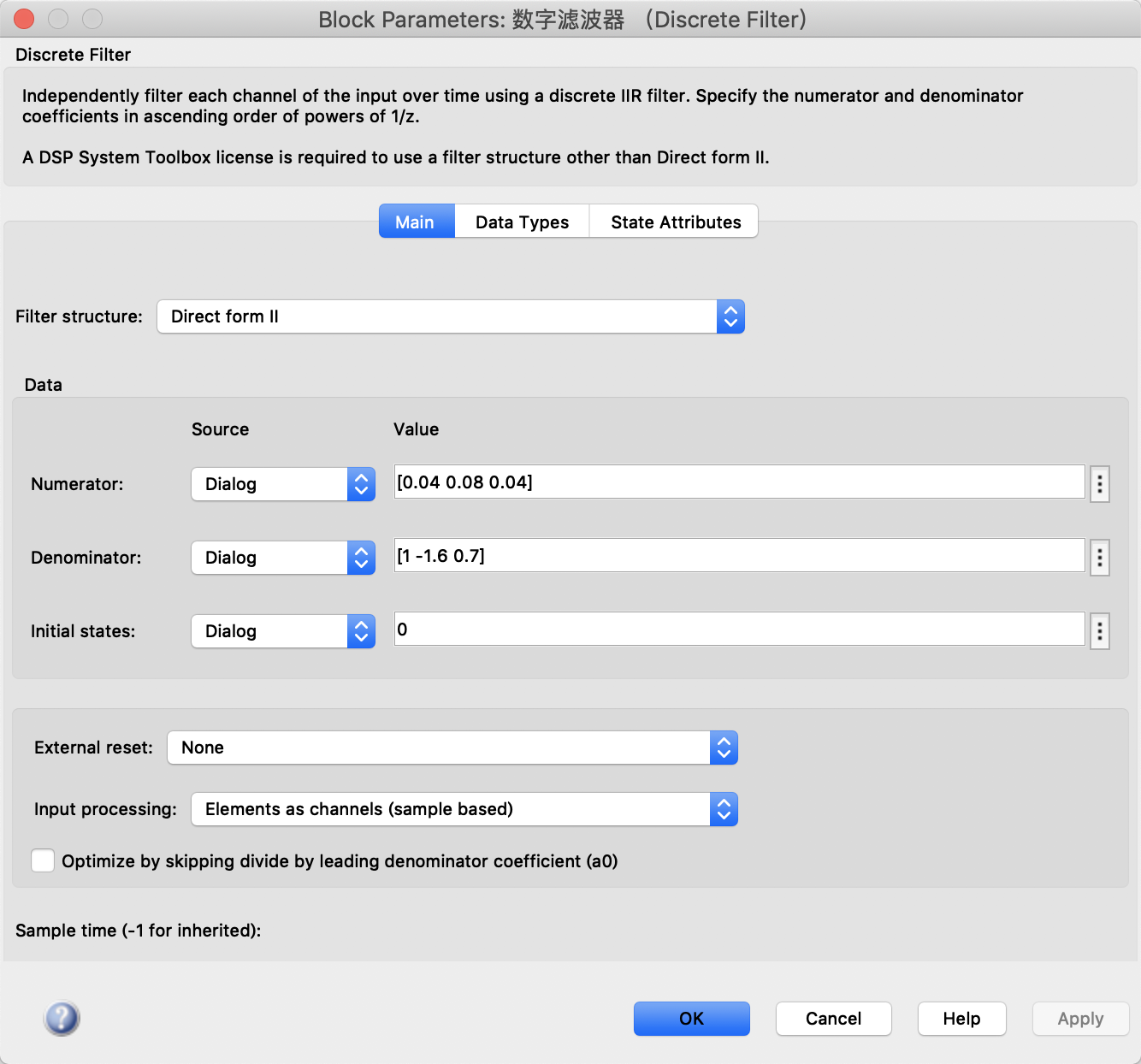
【例2】低通滤波器可以过滤掉信号中的高频部分,以获取信号中有价值的低频信号。下面是一个低通数字滤波器的差分方程描述:
y
(
n
)
−
1.6
y
(
n
−
1
)
+
0.7
y
(
n
−
2
)
=
0.04
u
(
n
)
+
0.08
u
(
n
−
1
)
+
0.04
u
(
n
−
2
)
y(n)-1.6y(n-1)+0.7y(n-2)=0.04u(n)+0.08u(n-1)+0.04u(n-2)
y(n)−1.6y(n−1)+0.7y(n−2)=0.04u(n)+0.08u(n−1)+0.04u(n−2)
其中,
u
(
n
)
u(n)
u(n)为滤波器输入,y(n)为滤波器输出。
对滤波器系统的差分方程进行
Z
Z
Z变换,即:
Y
(
z
)
U
(
z
)
=
0.04
+
0.08
z
−
1
+
0.04
z
−
2
1
−
1.6
z
−
1
+
0.7
z
−
2
frac{Y(z)}{U(z)} = frac{0.04+0.08z^{-1}+0.04z^{-2}}{1-1.6z^{-1}+0.7z^{-2}}
U(z)Y(z)=1−1.6z−1+0.7z−20.04+0.08z−1+0.04z−2
根据系统的数学描述进行建模。
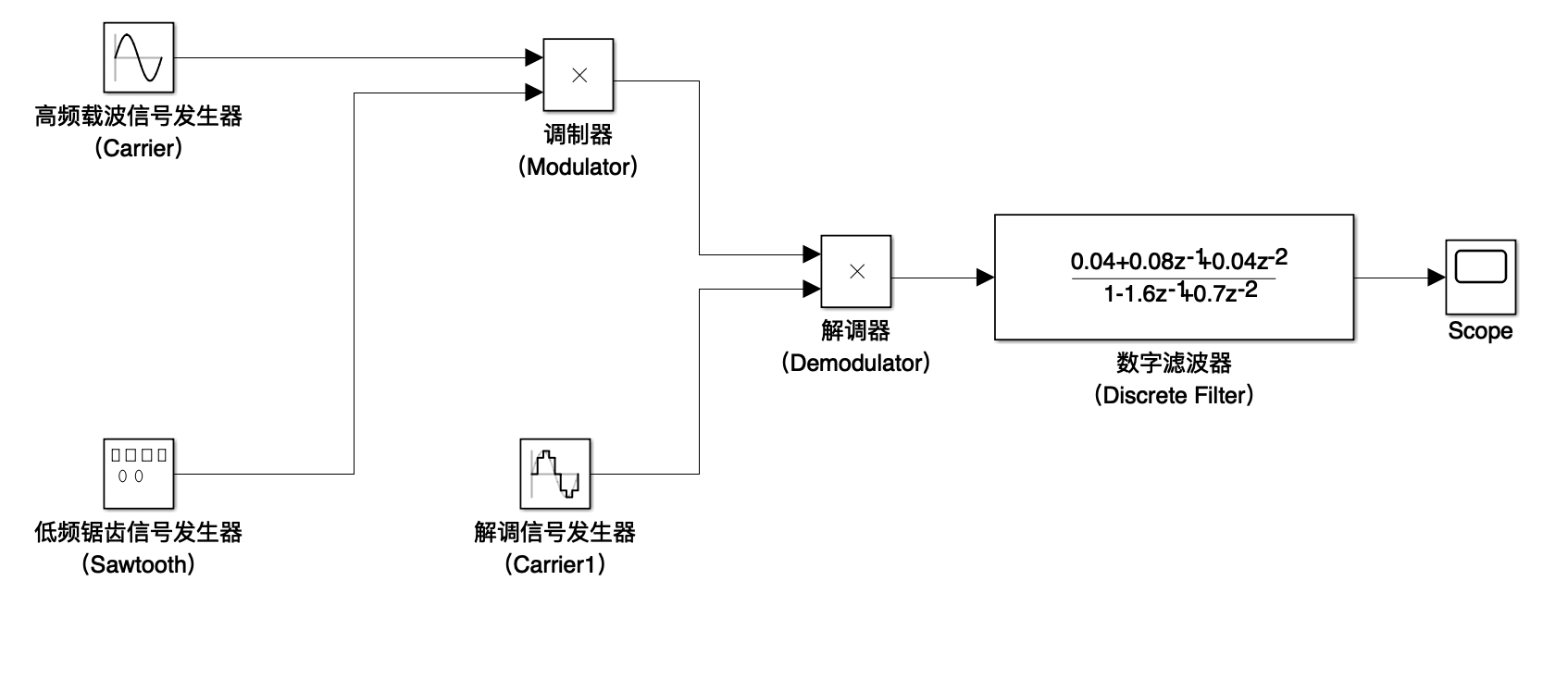
3.2 建模
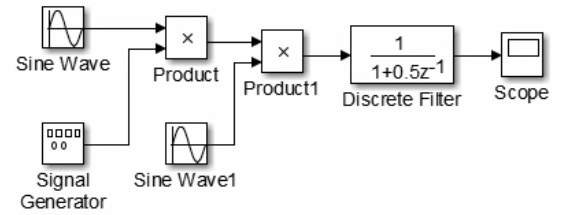
Sine Wave模块:Frequency频率设为1000rad/sec,其余为默认值。
Sine Wave1模块:Frequency频率设为1000rad/sec,Sample time采样时间设置为
0.005s,其余为默认值。
Signal Generator模块:Wave form 设置为sawtooth,其余为默认值。
Discrete Filter模块:设置如图所示。
Product模块:默认值。
Product1模块:默认值。
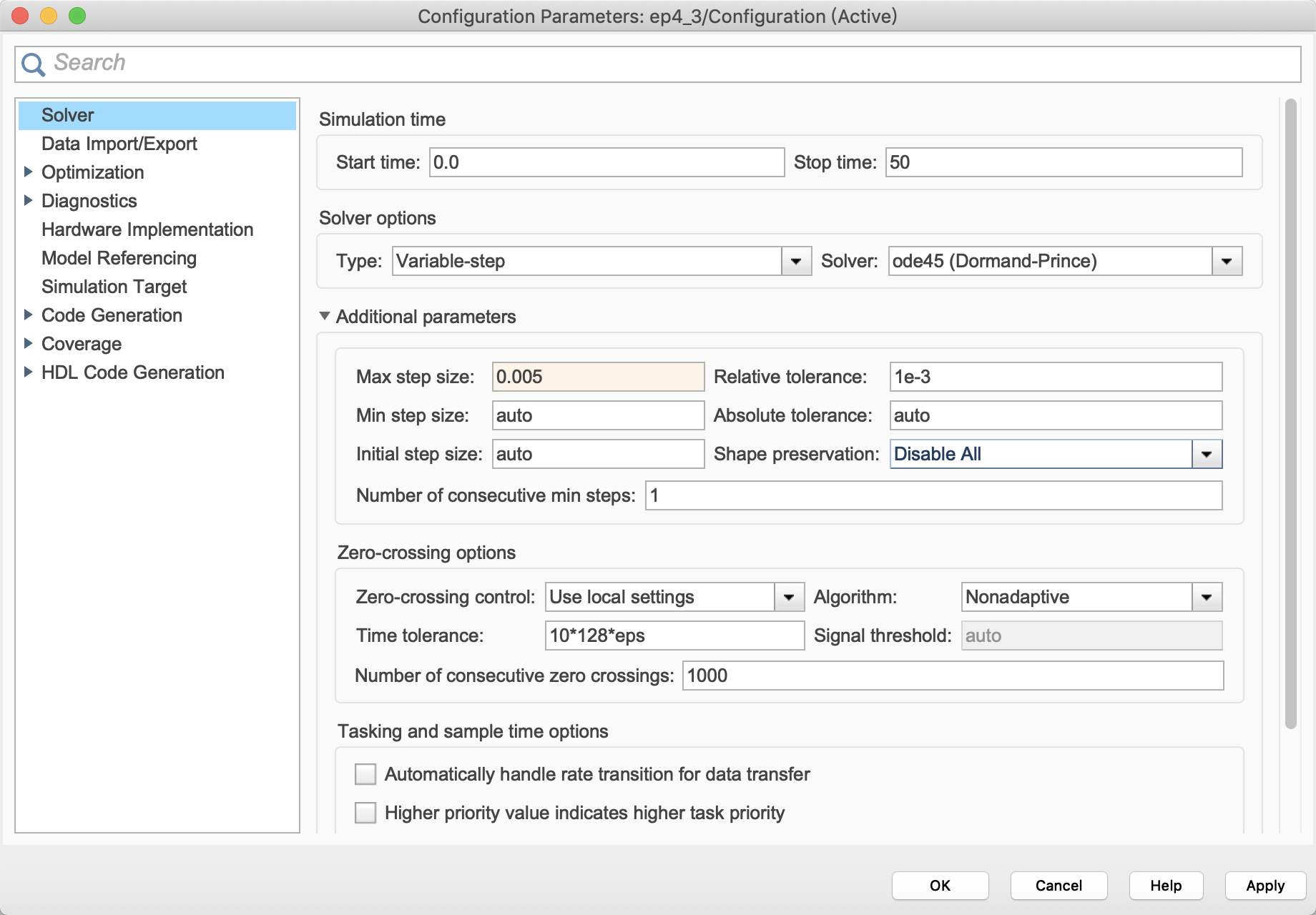
系统仿真时间设置为50s,求解器设为ode45,最大步长设置为0.005。
3.3 系统仿真
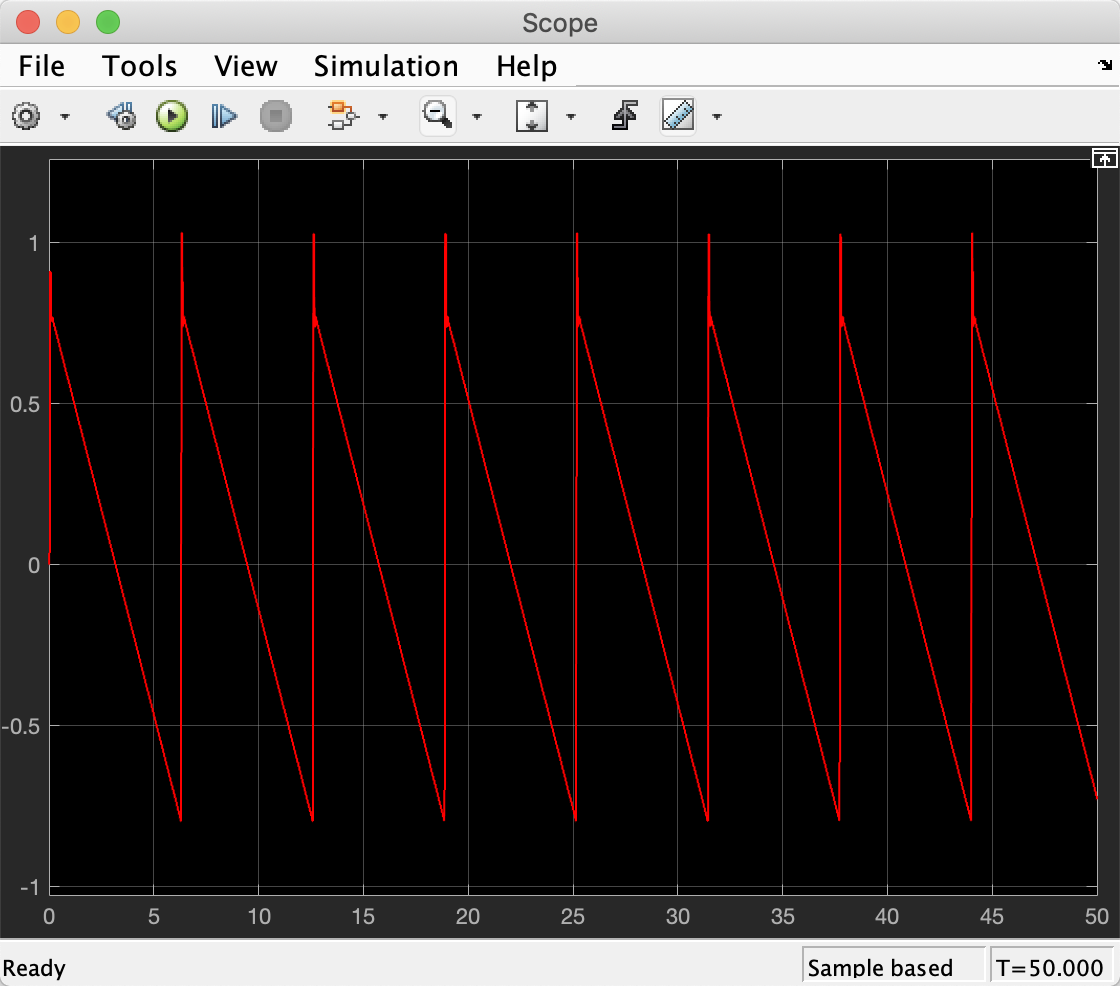
从仿真结果可以看出,滤波器的输出信号和原始锯齿波信号并不完全一致,而是存在一定的失真。这种失真不可避免,因为在实际工作中并不存在理想滤波器。在使用高频载波对低频信号进行调制时,信号间不可避免地会出现干扰。
PS:碰到里面参数设置或者模块的问题可以给我留言,我看到会及时回复的,大家互相交流学习。
最后
以上就是聪慧哑铃最近收集整理的关于第三讲 Matlab/Simulink入门——离散系统仿真实例1、离散系统基本概念2、人口变化(例1)仿真3、低通滤波器(例2)仿真的全部内容,更多相关第三讲内容请搜索靠谱客的其他文章。








发表评论 取消回复