【写在前面】
网上资料梳理,侵删烦请联系。或有表达错误,欢迎指出纠正。
【参考引用】
https://blog.csdn.net/xubin341719/article/details/7723725.
https://blog.csdn.net/quicmous/article/details/114922463.
https://max.book118.com/html/2017/0602/111063021.shtm.
https://zhuanlan.zhihu.com/p/36979065.
1. 摄像头模组
Camera Compact Module(CCM),即硬件上的摄像头。
四大件:镜头(Lens)、传感器(sensor)、图像处理芯片(DSP)、软板(FPC)。
前三者事决定一个摄像头好坏的重要部件。
工作原理:
物体通过镜头(lens)聚集的光,通过CMOS或CCD集成电路,把光信号转换成电信号,再经过内部图像处理器(ISP)转换成数字图像信号输出到数字信号处理器(DSP)加工处理,转换成标准的GRB、YUV等格式图像信号。
2. 模组结构
Camera硬件结构图如下:
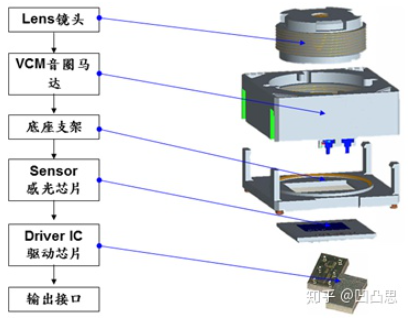
Camera Module 构成:
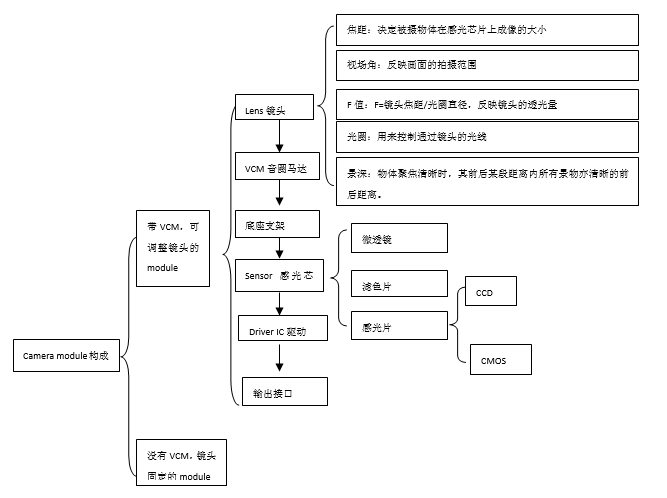
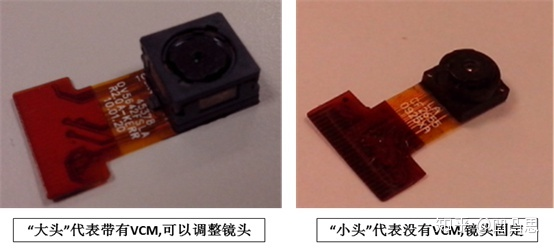
Camera镜头长相区分:
2.1 Lens
作用:
接收光信号并汇聚光信号于感光器件CMOS/CCD的装置。
一般由几片透镜组成。通过调整Lens获得拍照所需要的焦距。

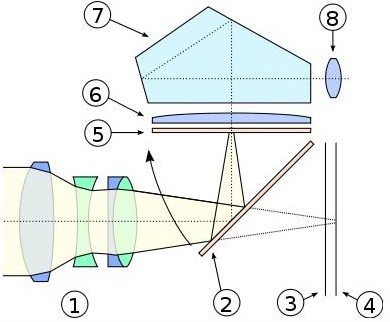
原理:
光通过透镜①,被反光镜②反射到磨砂取景屏⑤中。通过一块凸透镜⑥并在五棱镜⑦中反射,最终图像出现在取景框⑧中。当按下快门,反光镜沿箭头所示方向移动,反光镜② 被拾起,图像被被摄在CCD④上,与取景屏上所看到的一致。
主要参数:
①焦距f
镜头的中心点到感光元器件(CCD)上所形成的清晰影像之间的距离。
②视场角
水平视场角反映画面的拍摄范围。
焦距f越大,视场角越小,在感光元件上形成的画面范围越小。
③口径比(F值)
镜头明亮度。
F=镜头焦距/光圈直径
④光圈
位于镜头内部的、可以调节的光学机械性阑孔。
控制通过镜头的光线的多少。
⑤景深
当某一物体聚焦清晰时,从该物体前面的某一段距离到其后面的某一段距离内的所有景物也都相当于是清晰的。景深即焦点相当清晰的这段从前到后的距离。
2.2 sensor
作用:
一种半导体芯片,其表面有几十万到几百万个光电二极管,光电二极管受到光照就会产生电荷,将光线转换成电信号,再通过内部DA转换为数字信号。
sensor的每个像素点只能感受R、G、B中的一种,因此,每个像素点中存放的数据是单色的。即每个感光点只能感应一种光,这些最原始的感光数据称为RAW Data。
若想将每个像素的RAW Data数据还原成三基色,需要ISP进行处理。
原理:
(1)sensor substrate:
光电转换:光源转换成电子信号,并将信号传送到影像处理芯片(DSP),将影像还原。
(2)Micro-lens
聚光:在感光层前面加上一幅眼镜。感光面积由微型镜片的表面积来决定。
(3)Color filter
滤光:在感光层前面加一层滤光片。
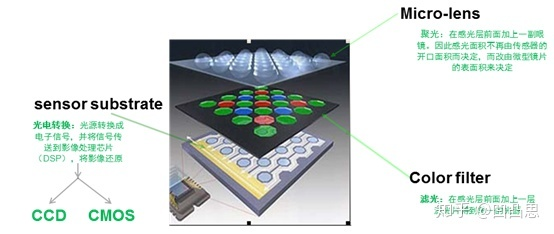
成像方式:CCD、CMOS。
相机规格中的多少百万像素,指的就是CCD的分辨率,也就是指这台相机的CCD上有多少感光组件。
①成像
相同尺寸下,CCD分辨率好、色彩还原度大,曝光基本准确;
②功耗
CCD:被动式图像采集。功耗高。由于无法ADC和信号处理,需要用3-4组电源;
CMOS:主动式图像采集。功耗低。将像素电荷转换成电压,读取前将其放大,使用3.3V电源即可驱动,一组电源即可;
③噪声
CMOS每个像素搭配一个放大器,放大器是模拟电路,一致性无法保证。
CCD仅有一个放大器在芯片边缘。
总结:
CCD:
优点:灵敏度高、噪声小、信噪比大;
缺点:工艺复杂、成本高、功耗高、像素提升难度大。
CMOS:
优点:集成度高(ADC与信号处理器整合,缩小体积)、功耗低、成本低,结构便于进行高速并行读取。
缺点:噪音大、灵敏度低、对光源要求高;
注:通过影像控制技术,CMOS可达到与CCD摄像头相媲美的效果。
2.3 DSP
数字信号处理芯片。
框架:
①ISP:图像信号处理器
用于处理image sensor的输出数据。
②JPEG encoder:JPEG图像解码器;
DSP控制芯片:将感光芯片获取的数据及时、快速地传到baseband中并刷新感光芯片。
控制芯片决定画面品质和流畅度。
两者决定影像流畅度。
原理:
若sensor未集成DSP,将原始数据(RAW Data)通过DVP方式传输到baseband芯片(可以理解为外挂DSP)。此时的数据格式为RAW RGB;
若集成DSP, RAW Data经过ISP还原出三原色,经过AWB、color matrix、lens shading、gamma、sharpness、AE和de-noise处理后输出YUV或者RGB格式的数据。
基带(baseband):
手机中的一块电路,负责完成移动网络中无线信号的解调、解扰、解扩和解码等工作,并将最终解码完成的数字信号传递给上层处理系统进行处理。
主流基带架构:
DSP+ARM
- DVP传输
分为3个部分:输出总线、输入总线、电源总线。
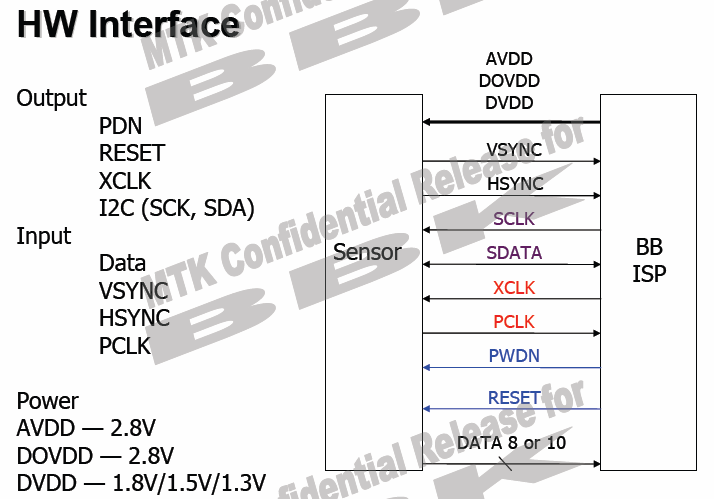
(1)输入总线
①PWDN
camera的使能管脚。
两种配置方式:①standby;②normal
当camera处于PWDN模式(standby)时,一切对camera的操作无效。因此,RESET前需将PWDN管脚置为normal模式。
②RESET
camera的复位管脚。
此方法为硬复位模式,camera的IO口恢复到出厂默认状态。
只有在XCLK开启后,将RESET置为低,硬复位才有效,否则无效。
③XCLK
camera的工作时钟管脚,为BB(baseband基带,可理解为CPU)提供camera的工作时钟。
④IIC
camera和BB通信的总线通道。
(2)输出总线
①data
camera数据管脚,输出格式有YUV、RGB、JPEG等。
②VSYNC
camera的帧同步信号管脚。
一个VSYNC信号结束,表示一帧(即一个画面)的数据输出完毕。
③HSYNC
camera行同步信号管脚。
一个HSYNC信号结束表示一行的数据输出完毕。
④PCLK
像素同步信号管脚。
一个PCLK信号结束表示一个像素点的数据输出完毕。
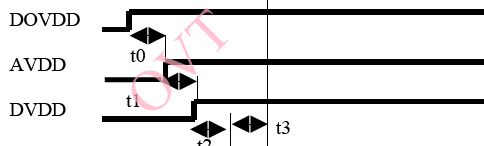
(3)Power线
①AVDD
camera模拟电压
②DOVDD
camera的GIPO口数字电压
③DVDD
camera的core工作电压
一般,先提供sensor的GIPO口电压,接着提供模拟电压,最后提供工作电压。时序图如下:
2.4 柔性PCB
简称"软板",连接芯片和手机。起到电信号传输作用。
最后
以上就是清爽老虎最近收集整理的关于【camera】模组结构1. 摄像头模组2. 模组结构的全部内容,更多相关【camera】模组结构1.内容请搜索靠谱客的其他文章。








发表评论 取消回复