ros入门--从helloworld到ros机器人开发(一)
- ros-helloworld
- 1.创建工作空间并初始化
- 2.进入 src 创建 ros 包并添加依赖
- 3.进入ros 包添加 scripts 目录并编辑 python 文件
- 4.为 python 文件添加可执行权限
- 5.编辑 ros 包下的 CamkeList.txt 文件
- 6.进入工作空间目录并编译
- 7.进入工作空间目录并执行
ros-helloworld
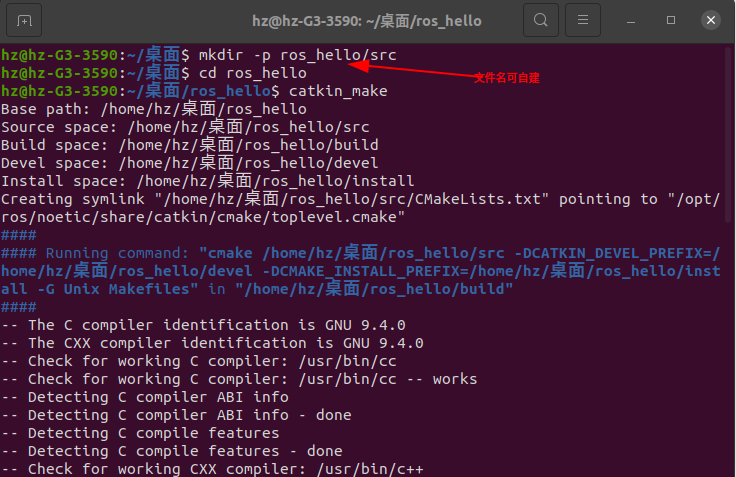
1.创建工作空间并初始化
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make
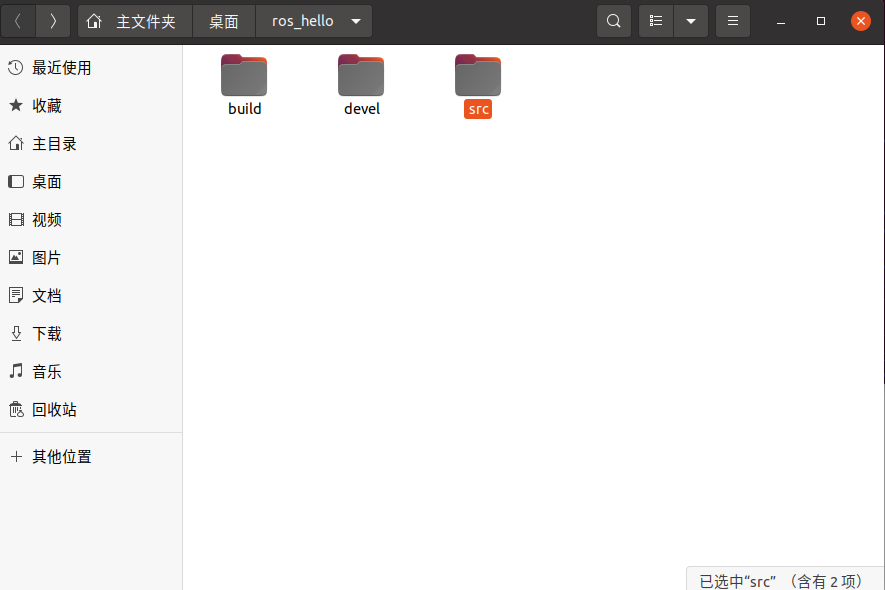
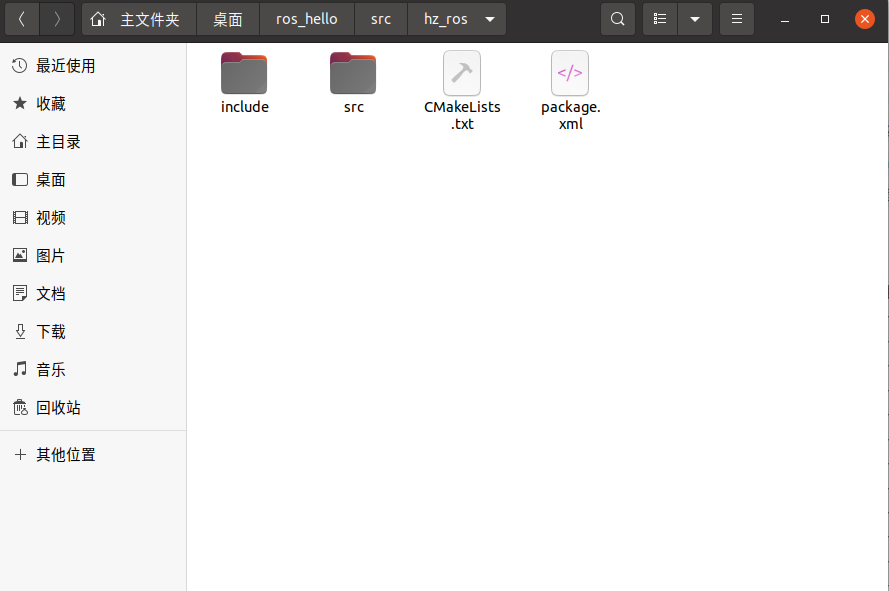
创建过后目录里是这个样子
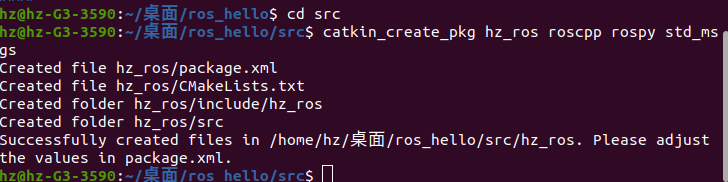
2.进入 src 创建 ros 包并添加依赖
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
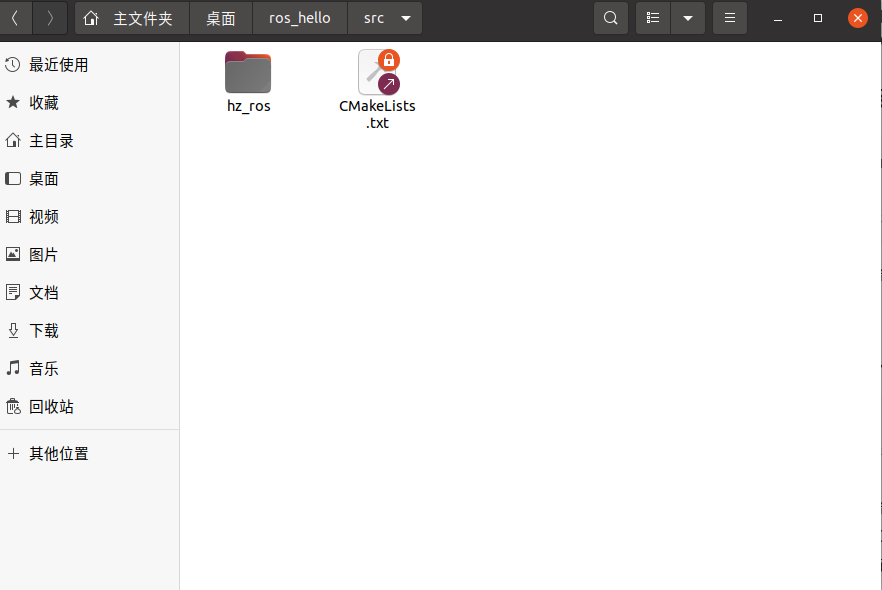
src目录
自建包目录结构
3.进入ros 包添加 scripts 目录并编辑 python 文件
cd ros包名
mkdir scripts
cd scripts
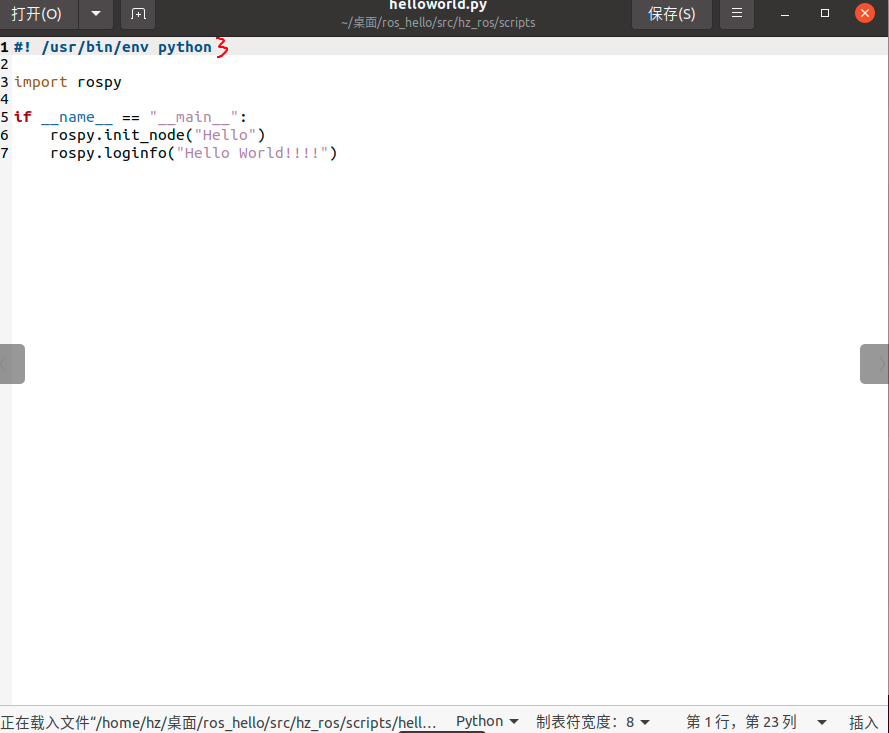
新建 一个python 文件,内容如下:
gedit helloworld.py
#! /usr/bin/env python
import rospy
if __name__ == "__main__":
rospy.init_node("Hello")
rospy.loginfo("Hello World!!!!")
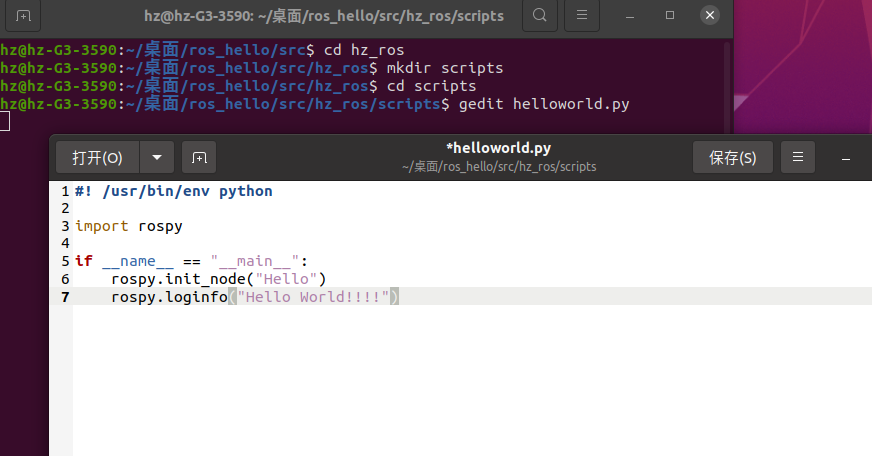
编辑完保存退出
4.为 python 文件添加可执行权限
chmod +x 自定义文件名.py

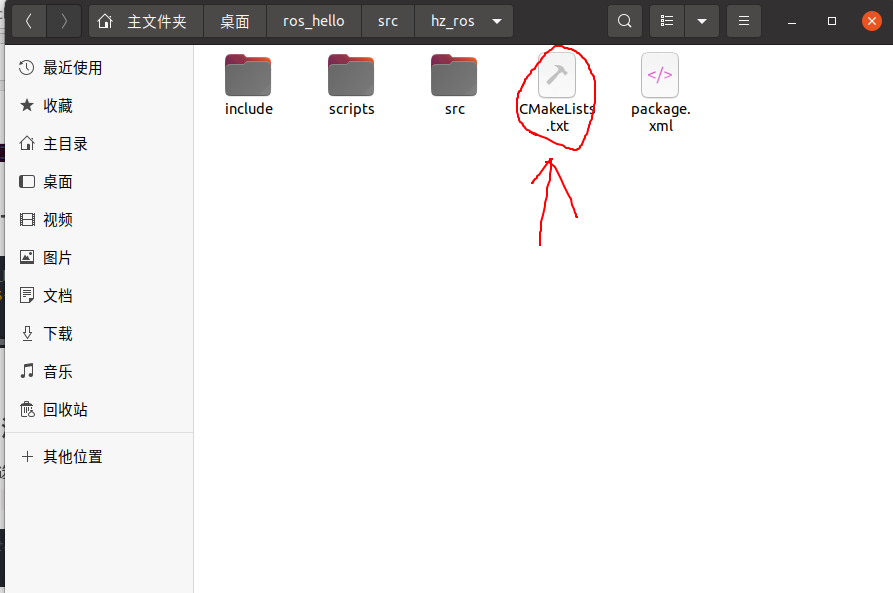
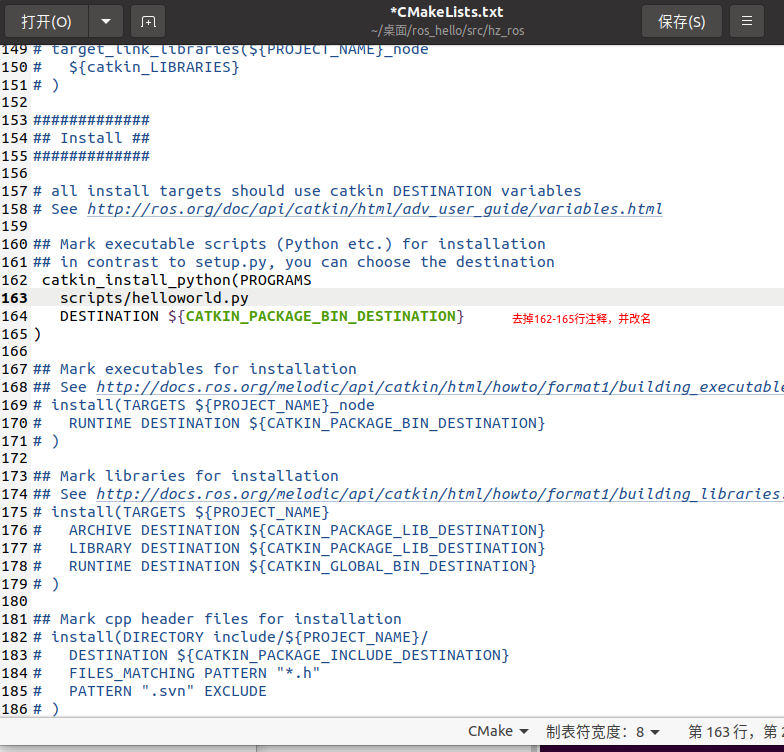
5.编辑 ros 包下的 CamkeList.txt 文件
catkin_install_python(PROGRAMS scripts/自定义文件名.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
打开这个
找到162行这里,去掉注释,更改你的python文件名
6.进入工作空间目录并编译
回到工作空间再编译一次
catkin_make
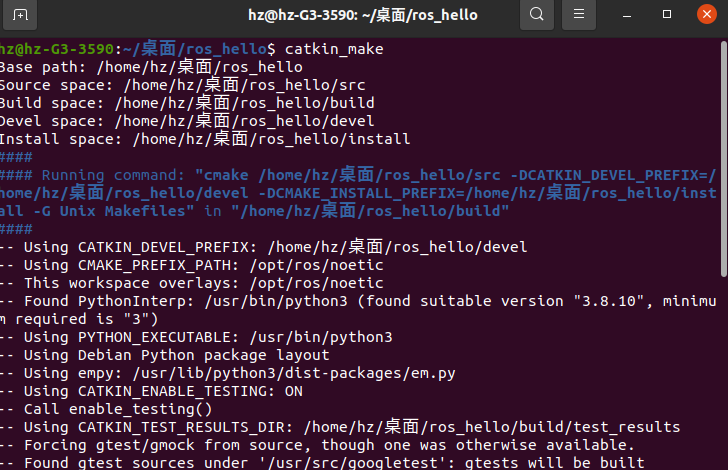
没有报错的话就是成功啦
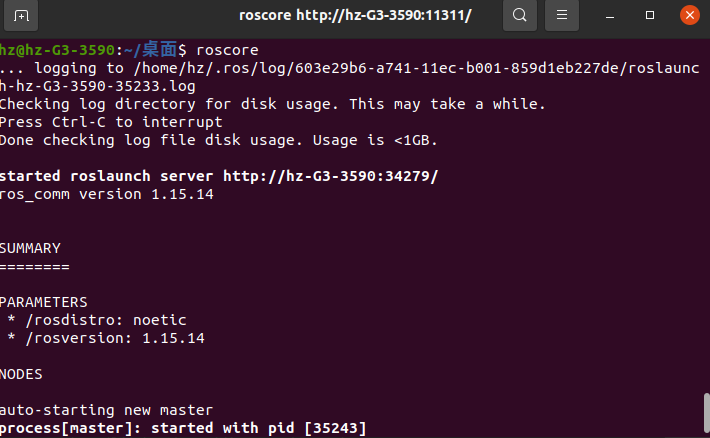
7.进入工作空间目录并执行
打开一个命令行启动ros内核
roscore
再打开另外一个命令行,进入工作空间
source ./devel/setup.bash
rosrun 包名 自定义文件名.py
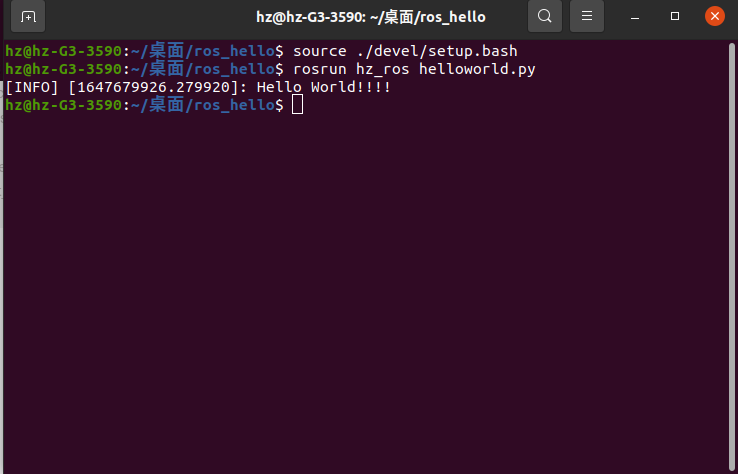
如果报错

可以修改python文件中python改成python3
到这里小韩哥就完成了ros第一步啦
持续更新~~
最后
以上就是舒心铃铛最近收集整理的关于ros--从helloworld到ros机器人开发ros-helloworld的全部内容,更多相关ros--从helloworld到ros机器人开发ros-helloworld内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复