22.1 PreScan路径跟踪
路径跟踪驾驶员模型是一个Simulink子模块,它将轨迹(路径+速度曲线)转化为车辆动力学模型的转向角输入。油门、刹车和初始速度也被控制,但这些与轨迹速度曲线无关。
为了获得平稳的转向,在速度曲线编辑器中至少使用100 Hz的轨迹步进频率和100 Hz的Simulink更新率以及15m/s的速度(默认值)。
在用户指定的动力学或第三方车辆动力学的情况下,建议使用带预瞄的路径跟踪器。
使用方法:
要配置路径跟随者参数,请双击块。会出现一个对话框,允许用户设置。
轨迹名称:默认值为PreScan GUI中定义的执行器活动轨迹。实际上用户可以选择实验中所有现有的轨迹。
可调整的转向增益因子。每辆车都有不同的转向行为。对于马自达来说这个值是1,奥迪8 1.1,雅力士1.1,本田泛欧0.05等。这个参数的默认值是1。
执行器转向位置点。如果为0,则执行器COG是跟随轨迹行驶的。X移位是以actor局部坐标系为基准。
可调式转向增益系数的默认值为1,但是,为了避免摩托车的侧倾角(滚动),该值必须手动设置。例如,Honda Pan欧洲摩托车需要0.05的转向增益。
在路径跟踪块的下方显示是:
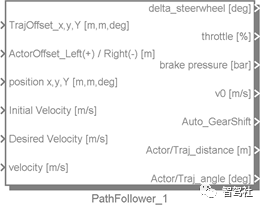
路径跟踪器输入
最后
以上就是超级心情最近收集整理的关于PreScan快速入门到精通第二十二讲驾驶员模型之路径跟踪的全部内容,更多相关PreScan快速入门到精通第二十二讲驾驶员模型之路径跟踪内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。






![[Prescan]Prescan中Sensor学习1. Idealized Sensor2. Detailed Sensor3. Ground Truth Sensor4 Tripod5 Physics Based](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)

发表评论 取消回复