自动驾驶仿真五——基于Carsim、Prescan、Simulink的联合仿真
- 1. 联合仿真流程
- 2. CarSim联合仿真配置要点
- 3. Prescan联合仿真配置要点
- 4. Carsim、Prescan、Simulink联合仿真结果
- 5. 参考学习的书目教材
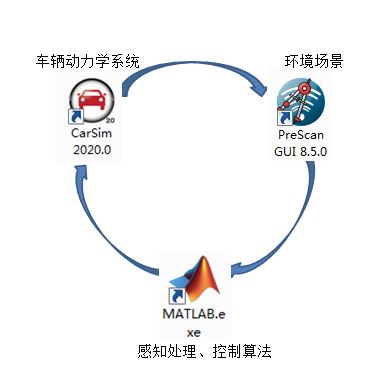
博主前面的博文已经介绍了Carsim和Prescan各自与Matlab/Simulink的相关联合仿真应用实例,并且论述过几款软件各自的优势及用法,CarSim适合动力学模型的建立,PreScan适合行车场景的搭建,Simulink适合控制算法的设计及信号通讯。所以如果把Carsim、Prescan、Simulink进行联合仿真,就可以发挥各自软件的长处,可以开展车辆动力学特性、应用环境感知以及控制决策的综合研究。
1. 联合仿真流程
为了顺利实现三种软件之间的联合仿真,首先需要分别实现PreScan /Simulink 与Car Sim/Simulink的联合仿真,博主已经在前面的系列博文中介绍过相关的基础联合仿真配置。在此基础上,再打通Carsim、Prescan、Simulink三种软件之间的壁垒,实现联合仿真。在现今的智能汽车的研究领域,为了通过环境感知得到的信息来进行车辆的动力学控制,通常需要同时运用以上三种软件。下图是联合仿真研究时典型的闭环流程图。
博主这里联合仿真所用的软件版本软件配置如下:
CarSim 2020.0
Prescan 8.5.0
Matlab R2019b
以上三款软件版本是可以联合配置无误的,下面就开始介绍在各自软件中的一些关键配置环节吧。
2. CarSim联合仿真配置要点
博主前面的博文已经介绍过Carsim和Simulink进行联合仿真相关配置方法和注意事项,博主之前文章用的是较老的版本CarSim 8.02,现在已经更新为CarSim 2020.0,配置方法也是一样的,同样可以与Matlab R2019b成功联合仿真。在CarSim中车辆配置、仿真工况设置等并不是联合仿真的关键,只需要结合实际项目工程应用需要相应设置即可,关键还是与Simulink的配置工作。
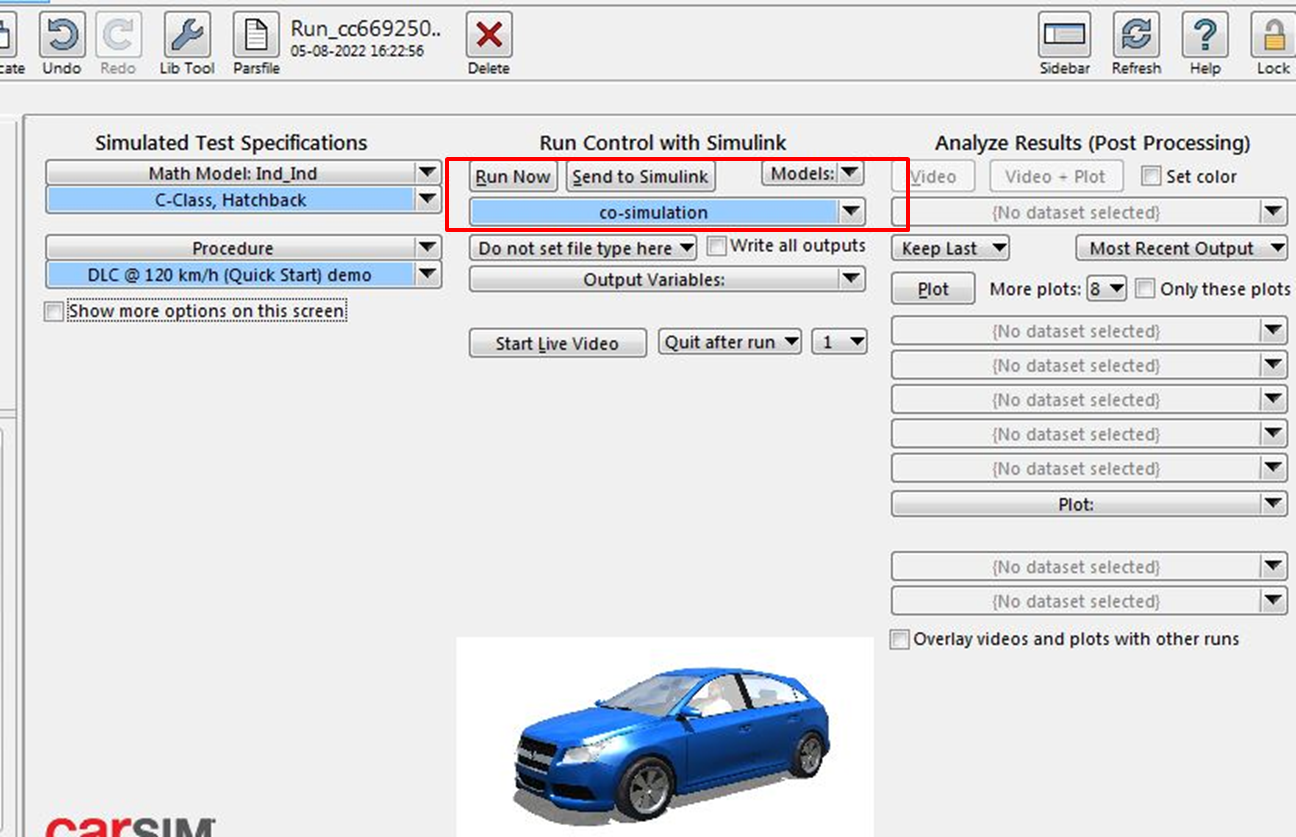
下面看看Carsim和Simulink的联合仿真求解配置情况:

① 可以设置simfile.sim文件和Simulink模型文件所在的文件夹。simfile.sim文件是send to simulink后自动生成的。
②Simulink模型test_1_cs.slx文件为提前建立的文件,里面只需要建立一个CarSim S-Function模块即可。

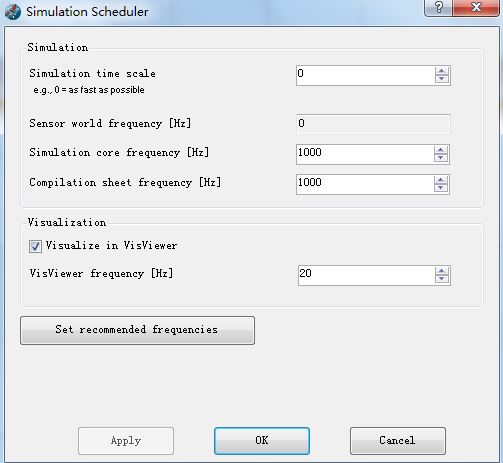
③Carsim联合Simulink中的仿真频率,需要与后面Prescan的仿真频率设置一致。
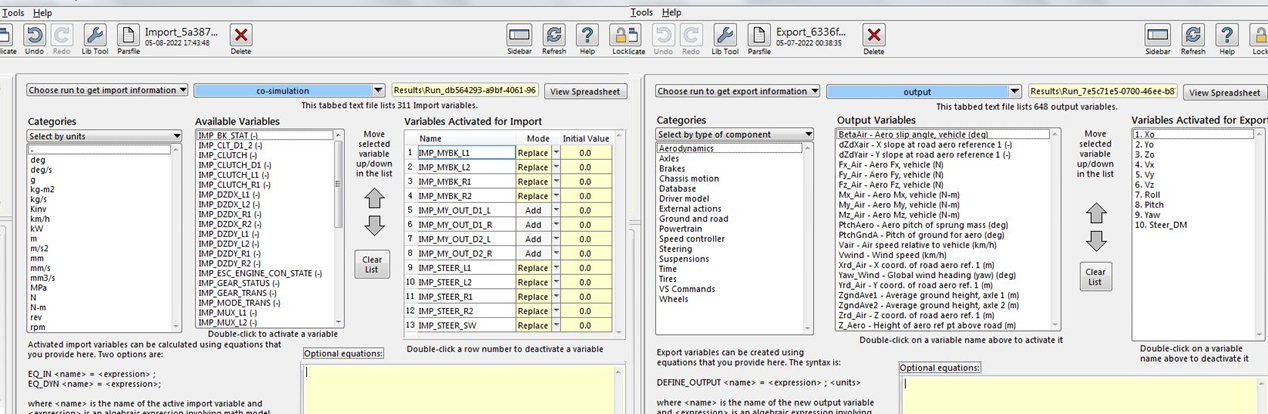
输入输出端口的参量,按照实际仿真目的要求来做即可,在此不展开论述,以下为本次仿真中做的示例:
3. Prescan联合仿真配置要点
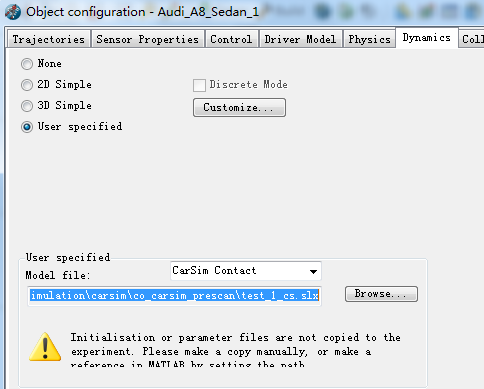
博主前面的博文同样也已经介绍过Prescan和Simulink进行联合仿真,相应的建模和设置基本相似,这里就简单建立一辆直线行驶的Audi_A8_Sedan_1。
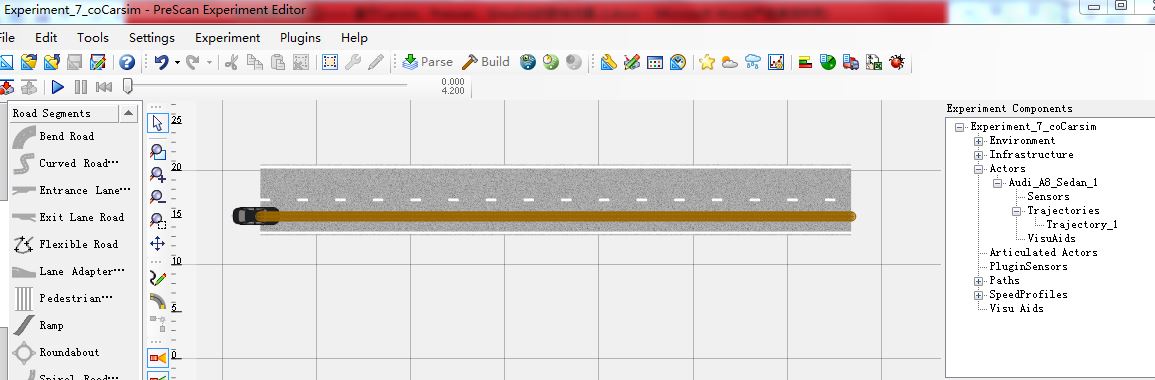
其中重要的联合仿真设置点是执行器的动力学参数设置为用户自定义的,动力学模型就选择在Carsim步骤中的test_1_cs.slx模型,模型类型为Carsim Contact。Animation—Wheel displacement也需要勾选。驾驶员模型Path Follower可以根据实际仿真需求增加控制勾选,不过本次分析就暂且不考虑。
仿真频率需要设置和前面Carsim的一致,这里都是1000hz。
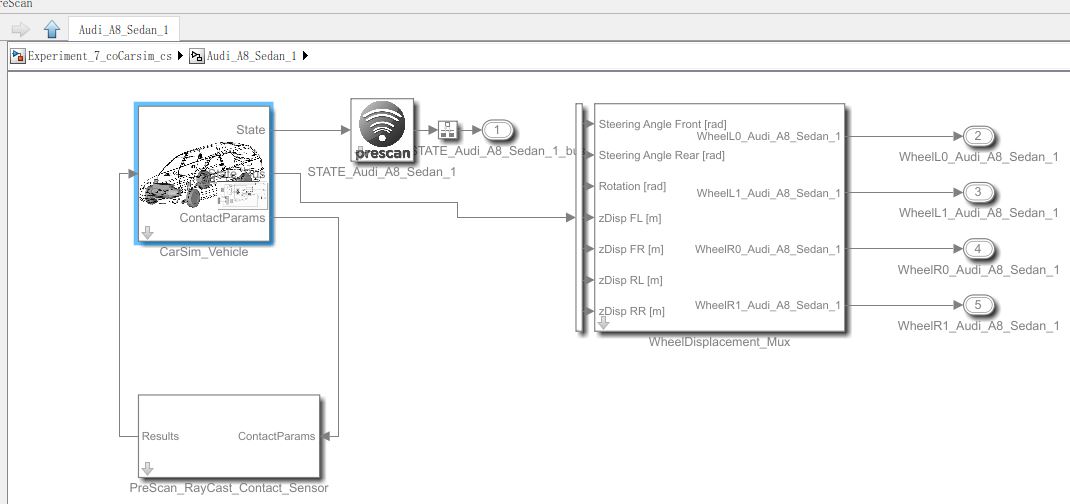
之后就是常规的联合仿真开打开到Simulink,可以看到Carsim的动力学车辆模型,查看Carsim Vehicle。
查看Carsim Vehicle可以看到CarSim S-Function还需要进行参量的建模连接,这里import/exportc参量都是根据前面的CarSim动力学模型来做配置,本例只做简单的参量常数设置。相关的动力学控制可以结合驾驶员模型Path Follower来实现,感兴趣的小伙伴可以参考博主前面的博文。
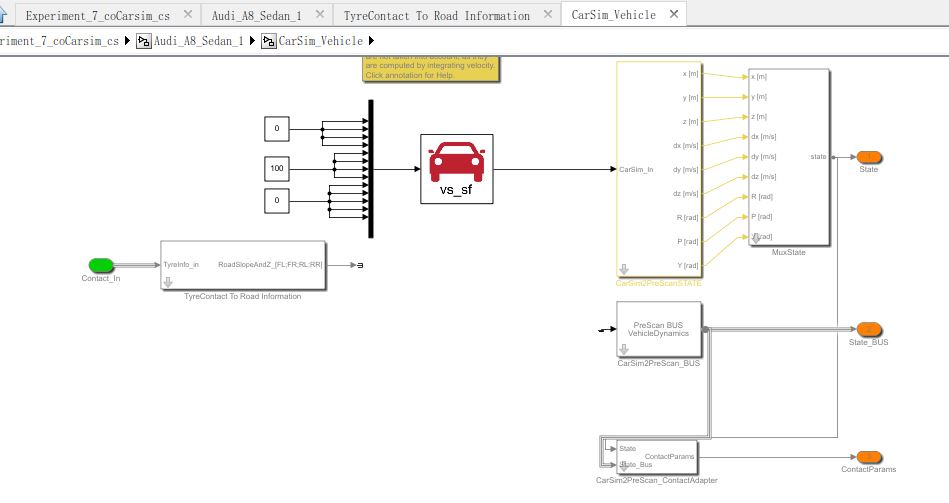
这里还有一个关键的设置,CarSim S-Function需要直接链接到CarSim步骤中生成的simfile.sim文件。
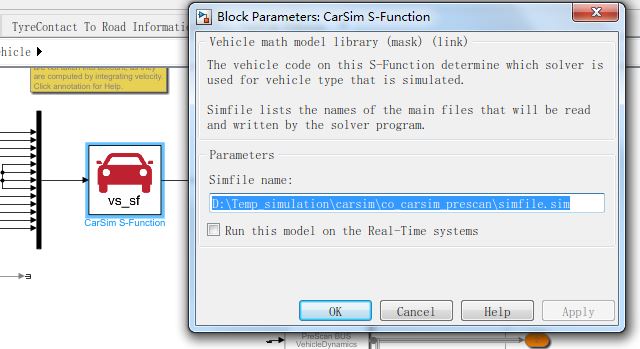
以上就是一些关键的联合仿真设置点。
4. Carsim、Prescan、Simulink联合仿真结果
把以上的关键联合仿真设置点做好,当然如果碰上一些其他的问题,就按提示解决即可,然后就可以在Simulink中运行联合仿真了,以下为仿真结果动图:
以上简单实例即实现了Prescan、Carsim、Simulink 三者的联合仿真,这可作为综合研究智能汽车的环境感知以及控制决策提供了一种可行的方法,博主前面的自动紧急制动AEB也可按此来做联合仿真更新的。应用该研究方法,还可以研究自适应巡航ACC、自动泊车、弯道避撞控制、车道保持算法等汽车高级驾驶辅助系统的功能,同样的方法思路可以参考开展研究。
5. 参考学习的书目教材
- PreScan Manual Documentation
- 《Matlab/Simulink系统仿真超级学习手册》 石良臣 编著
- 《Pre Scan、Car Sim、Simulink 联合仿真方法研究》 陆一弘
- 《基于PRESCAN的汽车自动驾驶仿真》贺勇
=文档信息=
本学习笔记由博主原创整理编辑,仅供非商用学习交流使用
由于水平有限,错误和纰漏之处在所难免,欢迎大家交流指正
如本文涉及侵权,请随时留言博主,必妥善处置
版权声明:非商用自由转载-保持署名-注明出处
署名(BY) :zhudj
文章出处:https://zhudj.blog.csdn.net/
最后
以上就是能干雪糕最近收集整理的关于自动驾驶仿真(五)—— 基于Carsim、Prescan、Simulink的联合仿真1. 联合仿真流程2. CarSim联合仿真配置要点3. Prescan联合仿真配置要点4. Carsim、Prescan、Simulink联合仿真结果5. 参考学习的书目教材的全部内容,更多相关自动驾驶仿真(五)——内容请搜索靠谱客的其他文章。







![[Prescan]Prescan中Sensor学习1. Idealized Sensor2. Detailed Sensor3. Ground Truth Sensor4 Tripod5 Physics Based](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)
发表评论 取消回复