安全问题
ISO-26262行业标准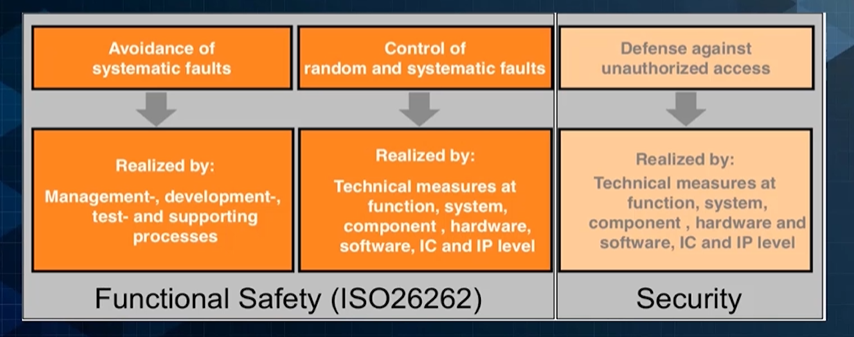
目前无人驾驶安全分为function safety(ISO-26262 covered)和security
1.function safety是指系统本身运行的安全性,又包含系统性故障 Systematic Faults 和随机故障 Random Faults。
(1) Systematic Faults:指设计的时候系统就存在问题。软件和硬件都有可能存在系统性故障。我们要尽可能减少Systematic Faults。
(2)Random Faults:随机出现的故障,其本身是不可控。一般情况下,只有硬件会出现随机故障。
(相关概念:1fit:十亿小时内出现一次故障)
2.security是指系统抵御外来攻击的安全性。以前要攻陷一辆车,是很困难的事情,没有物理连接也没有网络连接。但是有了无人驾驶技术以后,车总是和网络相连,让车可能会被黑客进行攻击。
Apollo技术框架
Apollo的技术框架包括四层:线控车辆平台(Reference Vehicle Platform)、参考硬件平台(Reference Hardware Platform)、软件开放平台(Open Software Platform)、云端服务平台(Cloud Service Platform)
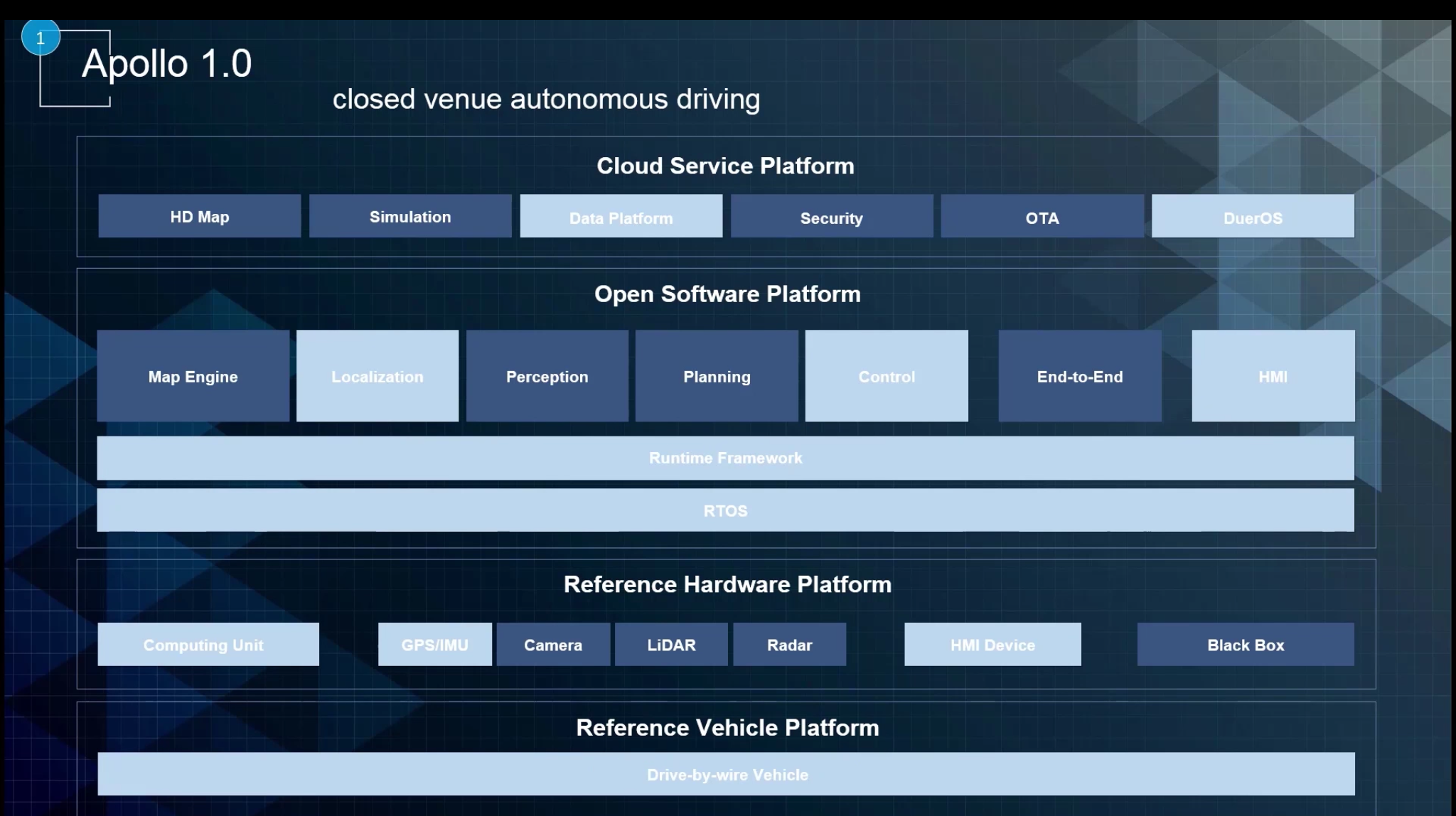
最底下一层是线控车辆平台(Reference Vehicle Platform),所有的东西都需要装载在线控车辆上才可以跑起来。
再往上一层是参考硬件平台(Reference Hardware Platform),里面包含一个计算平台(computing unit)用于计算传感器传递的各类信息,例如英伟达的芯片Drive PX。这一层还包含各种传感器。例如:Camera摄像头、lidar、radar等。除了计算单元和各类传感器之外,硬件平台还包括用于人机交互的HMI Device和用于记录信息、技术迭代的黑匣子。
再往上是软件开放平台(Open Software Platform),这整块是开源的,可以在Github上看到(https://github.com/ApolloAuto/apollo)。其底层仍然使用ROS,可以看作一个操作系统的底层框架加一个消息的分发机制。软件开放平台还包括map engine,定位、感知、规划、控制等技术模块。
最上面一层是云端服务平台,车在路上跑需要和云端有一定的交互,云端计算出模型再把它下发到车上。
最后
以上就是狂野吐司最近收集整理的关于apollo学习笔记五:apollo开源模块的全部内容,更多相关apollo学习笔记五内容请搜索靠谱客的其他文章。








发表评论 取消回复