线控转向系统主要分为六大模块,分别是方向盘模块、路感模拟模块、转向执行模块、齿轮齿条模块和左、右转向前轮模块。
先单独对每个子系统进行建模,最后进行联合仿真实验。
第一节:方向盘模块
方向盘在转动过程中会受到转向柱摩擦了的影响,为了克服这个摩擦力,会使转向柱产生扭转。根据牛顿第二定律,将方向盘与转向柱看做一个整体,进而简化得到方向盘组件的动力学方程:

Tsw:驾驶员输入力矩
Jsw:方向盘总成转动惯量
Bsw:方向盘总成阻尼系数
K1:转向轴扭转刚度
theta_sw:方向盘转角
theta_m:路感电机转角
Gm:路感电机减速器减速比
Tfrsw:方向盘等效摩擦力矩
Matlab/Simulink建模如下:
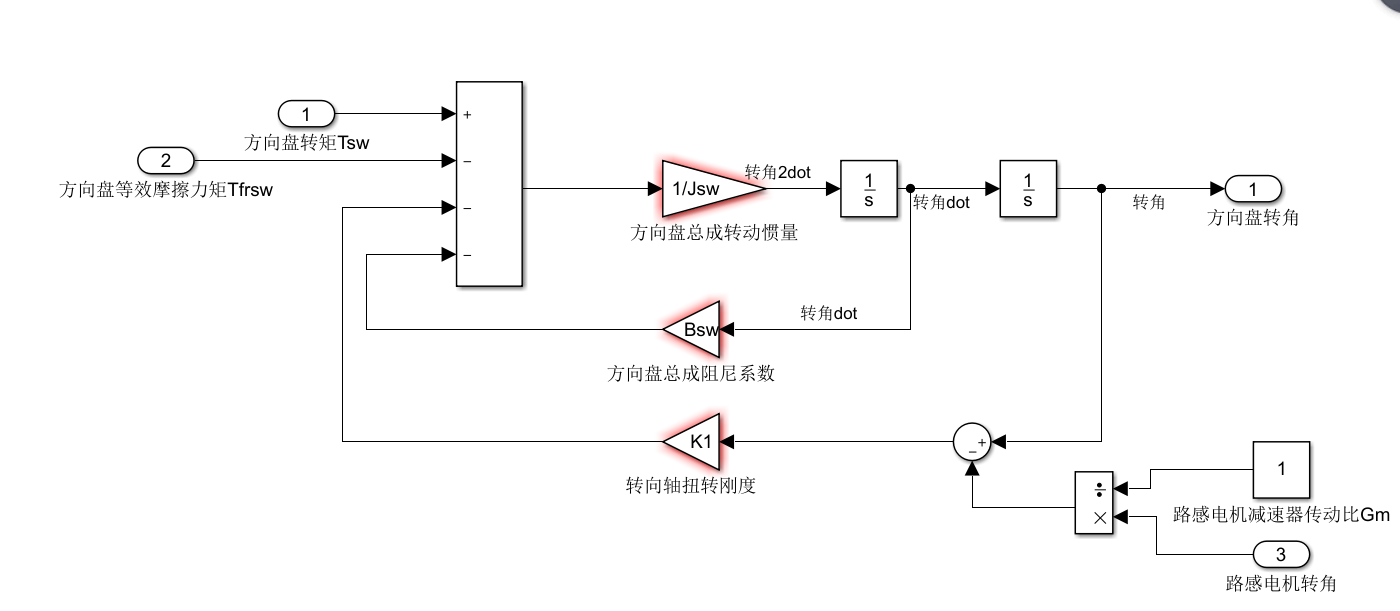
图中的转角2dot仅仅是为了方便记忆,可根据自己的爱好进行设置,中文也可以。
最后
以上就是听话钻石最近收集整理的关于SBW(线控转向系统转向盘子系统Matlab/Simulink模型搭建)的全部内容,更多相关SBW(线控转向系统转向盘子系统Matlab/Simulink模型搭建)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复