我是靠谱客的博主 酷酷电话,这篇文章主要介绍基于无迹卡尔曼滤波(Unscented Kalmam Filter, UKF)的车辆状态观测器 Carsim与Simulink联合,现在分享给大家,希望可以做个参考。
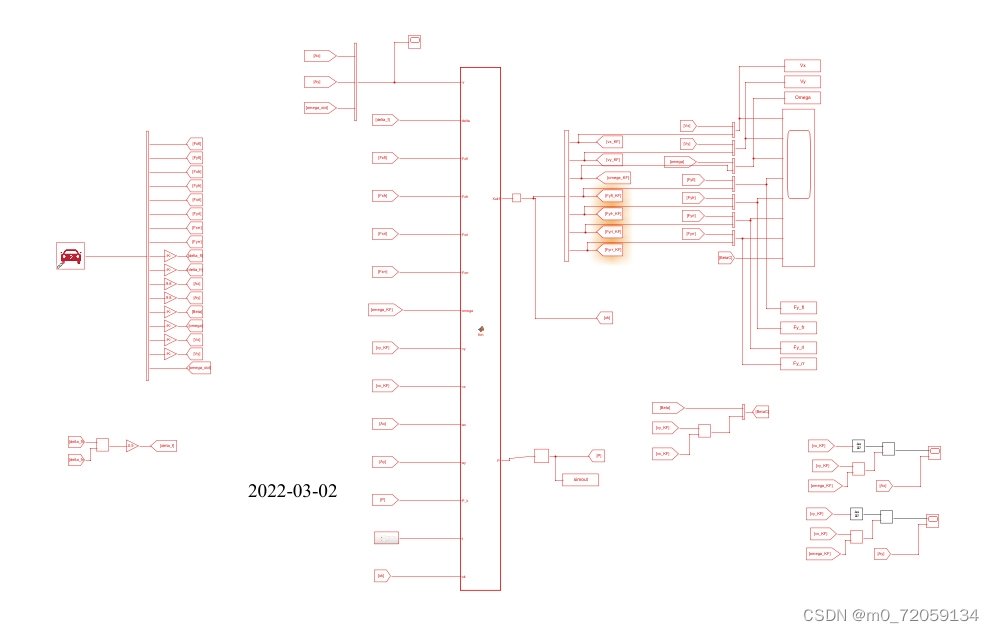
基于无迹卡尔曼滤波(Unscented Kalmam Filter, UKF)的车辆状态观测器 Carsim与Simulink联合
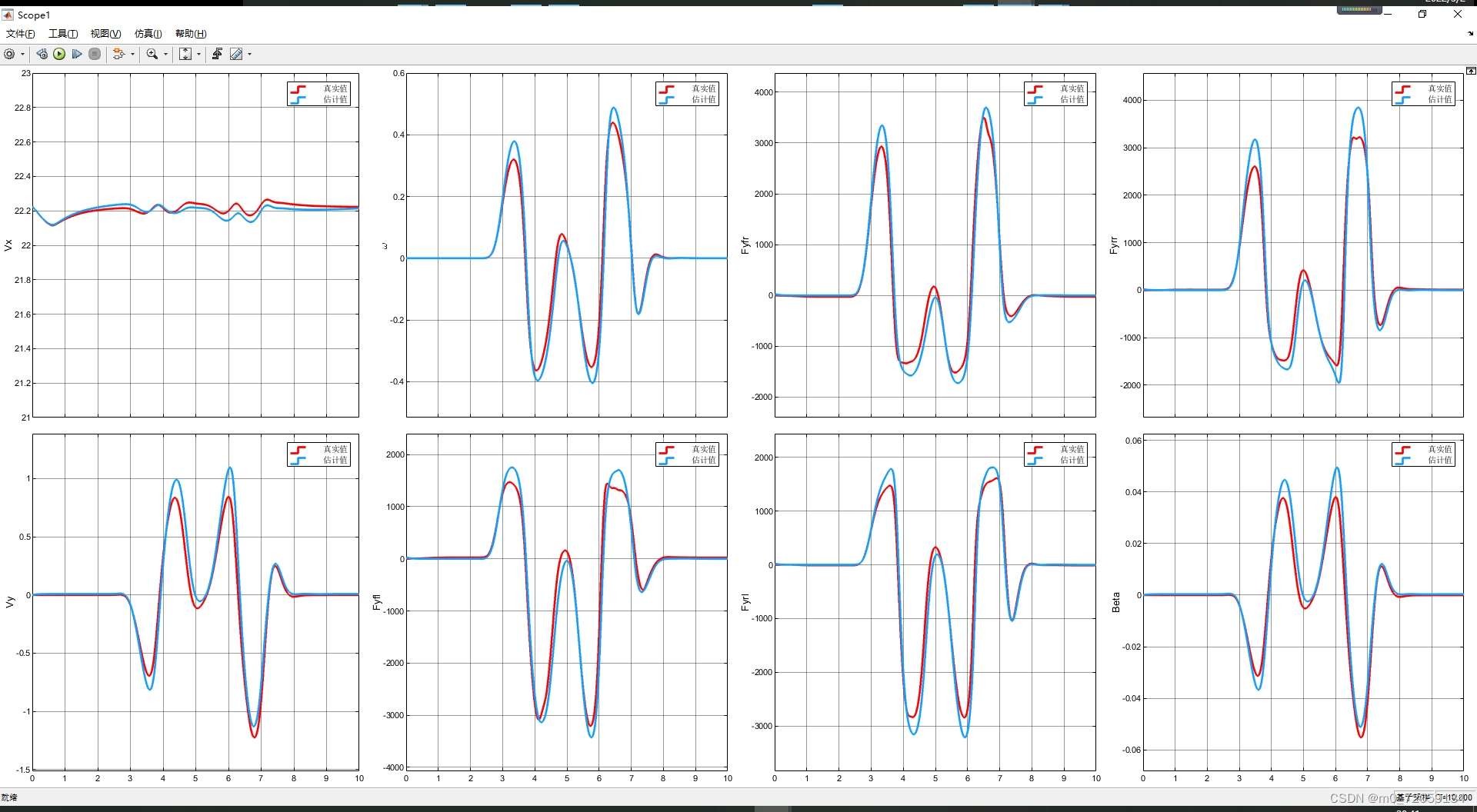
可估计车辆纵向车速,横向车速,横摆角速度和四个车轮侧向力(效果见图)
UKF使用子函数形式编程,只要定义好状态方程和观测方程,便可方便的进行二次开发
Carsim2018 兼容Carsim2019 MATLAB2018b
带有详细注释和说明文档
Carsim与Simulink联合估计难度与单纯的Simulink模型估计难度不同
★用Carsim做状态估计的难度在于carsim的车辆模型完全是黑箱状态,为了获得较好的估计结果需要不断的调整车辆模型参数
★估计的参数较多也增加了估计难度,比如估计侧向车速需要用到轮胎侧向力,但轮胎侧向力也是需要通过估计获得的,这样就会存在误差的累积,因此估计的参数越多难度越大
 ID:93169669436989492
ID:93169669436989492 让一部分人先把模型搞起来
让一部分人先把模型搞起来

最后
以上就是酷酷电话最近收集整理的关于基于无迹卡尔曼滤波(Unscented Kalmam Filter, UKF)的车辆状态观测器 Carsim与Simulink联合的全部内容,更多相关基于无迹卡尔曼滤波(Unscented内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复