基于CUBEMX和STM32C8T6的同轴麦轮小车制作(三)——麦克纳姆轮运动学原理及速度解算。
摘要:本文如标题,分为2个部分,一个是关于麦克纳姆的为什么可以进行全向移动,一个是如何通过分析通过各轮子单独转速来合成底盘整体的运动速度。
1.麦轮运动学原理
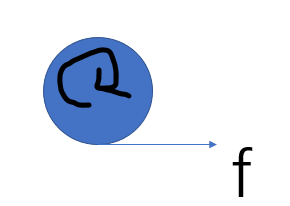
首先我们要明确一点,那就是轮子之所以会和地面发生相对移动,是因为它收到了地面给他的静摩擦力,我们可以想象一个轮子,如果它朝前转动,那么轮子底部与地面接触的那一点,其相对于地面是向后运动的,也就是其摩擦力是向前的,是与运动方向相同的。
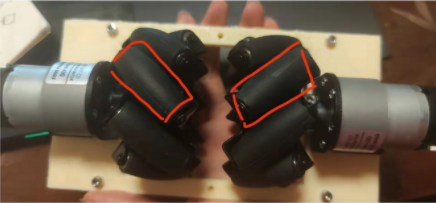
下面我们带入到麦轮,首先我们先拿出我们的底盘,把他朝左移动,观察他的两个轮子的转向:
我们可以观察到,左边轮子向前转,右边轮子向后转,麦轮整体向左移动 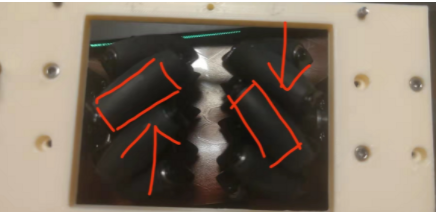
接下来我们分析为什么会这样,首先我们从底面的小辊子开始,根据镜像,我们可以得到现在与地面接触的辊子是这个形状的。
由此我们可以做受力分析,当左轮向前转,右轮向后转,其受到的摩擦力方向如下:
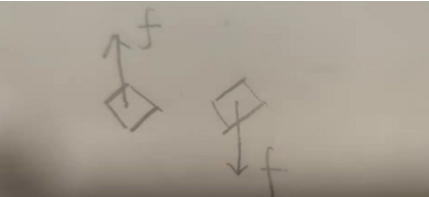
然后我们正交分解摩擦力,垂直于辊子的,和平行于辊子的,然后去掉与运动无关的,和辊子垂直的力,可得下图。
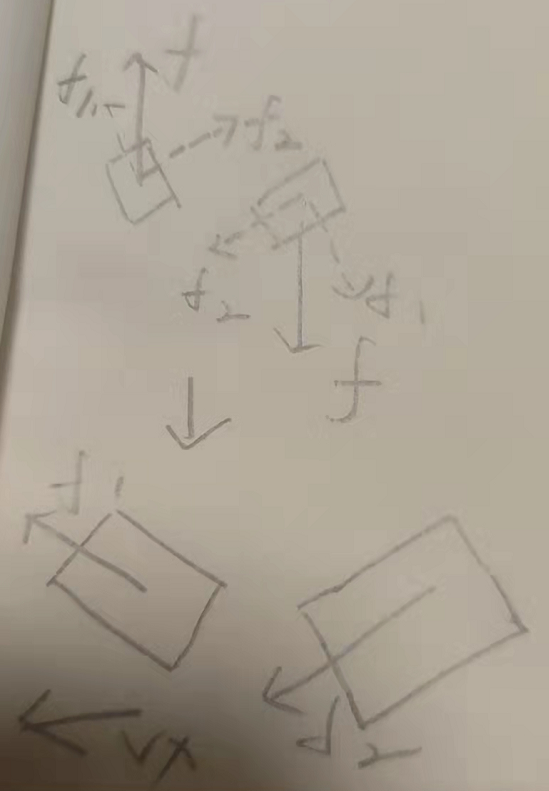
最后我们通过合力可得出小车整体是向左移动的。
2.麦轮速度解算
注:本文只讨论特殊平移情况,即只有前后左右移动的情况。
书接上文,我们假设整体的速度为V M/S,那么对于辊子,我们做如下分析:
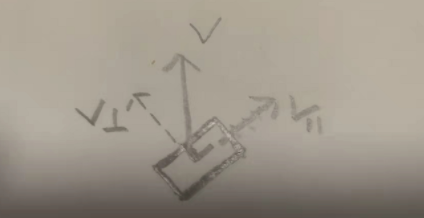
由于垂直于辊子的速度分量对运动无效,我们只看平行于辊子的速度分量,即 v * 其方向向量,以图中例子可得。
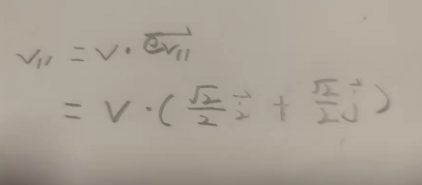
然后我们通过辊子的速度,除以cos45°,即可得到轮子的转速,有:
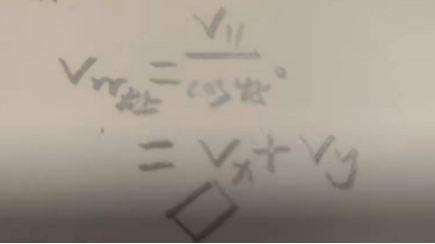
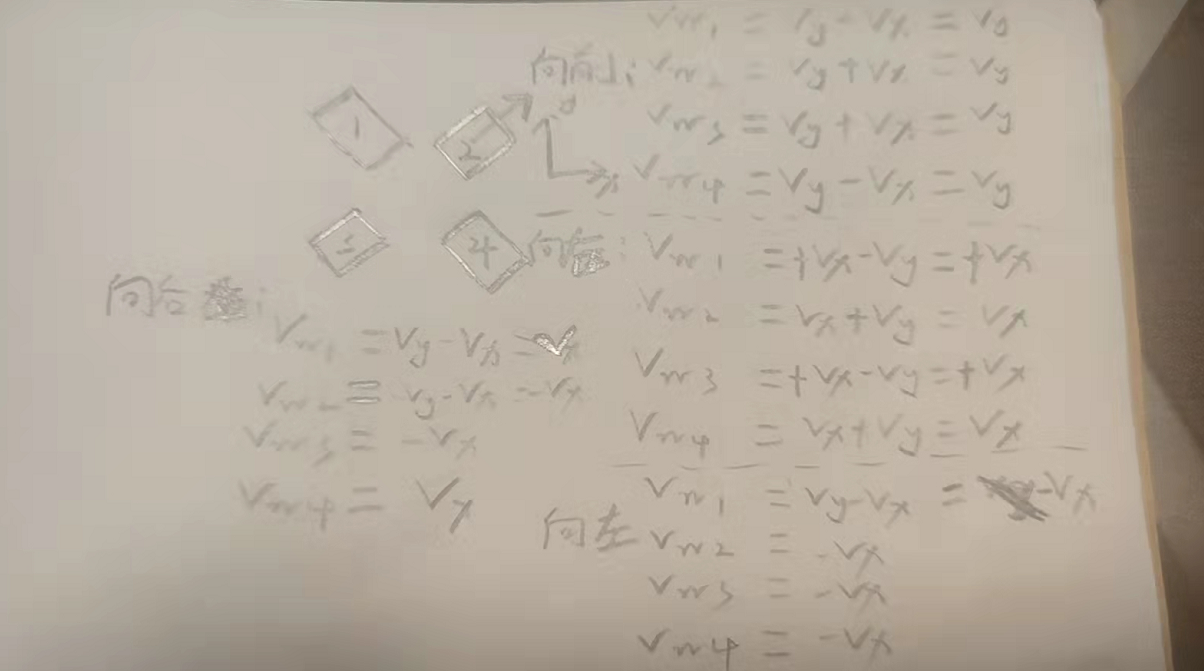
至此以推导完毕,特别的情况分析如下,以底盘形状为X型举例:
最后
以上就是爱听歌悟空最近收集整理的关于基于CUBEMX和STM32C8T6的同轴麦轮小车制作(三)——麦克纳姆轮运动学原理及速度解算。基于CUBEMX和STM32C8T6的同轴麦轮小车制作(三)——麦克纳姆轮运动学原理及速度解算。的全部内容,更多相关基于CUBEMX和STM32C8T6内容请搜索靠谱客的其他文章。








发表评论 取消回复