文章目录
- 一、L298N驱动介绍
- 二、麦克纳姆轮特点及其运动
- 三、CubeMx配置
- 1.RCC
- 2.SYS
- 3.GPIO
- 四、代码
一、L298N驱动介绍
驱动部分介绍选https://blog.csdn.net/weixin_46758622/article/details/115804098?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522162918592516780261966328%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=162918592516780261966328&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2blogfirst_rank_v2~times_rank-18-115804098.pc_v2_rank_blog_default&utm_term=%E7%9B%B4%E6%B5%81%E5%87%8F%E9%80%9F%E7%94%B5%E6%9C%BA+hal&spm=1018.2226.3001.4450

输出A(OUT1和OUT2):顺序无所谓,接通后可根据IN1,IN2或者IN3,IN4决定正反转
12V供电、供电GND:12V电源接口接12V电池正极,负极接地,同时一定要和单片机共地,尽量不要高于16V也不要低于8V,过高过低都可能会烧毁芯片。
5V供电:由于L298N电机驱动模块自带了稳压功能,可以供出5v电压,在以后的智能小车项目中,单片机的供电选择可以选这个。
通道A使能(EN1):这里的使能可以类比STM32的GPIO口和时钟配置,这是使能的意思就是让它开启工作状态。这个使能接口是用来控制PWM输入的,也就是说,如果单纯只想让电机转动起来,可以不用管EN1,把那个帽子给它盖上,它就和5v接上了,也就是它不使能了。以后如果想用PWM来控制,那就把帽子拔了,把EN脚接到单片机的PWM输出口。
单片机IO口控制输入(IN1、IN2):这两个脚是接到STM32的某两个GPIO口上,通过给予高低电平,就可以实现电机的正反转。

所以,剩下的IN3、IN4、EN2、OUT3和OUT4都同理。
供电超过12v,拔掉跳线帽,再在5v处输入5v电压。
供电不到12v,插上跳线帽,5v作为输出端。
ENA和ENB相当于开关,插入跳线帽相当于打开开关,使能两个口
二、麦克纳姆轮特点及其运动
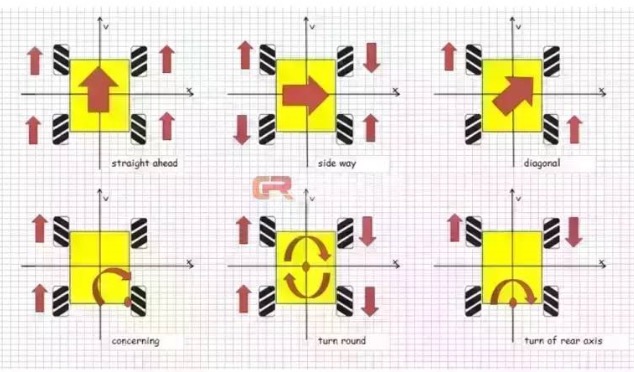
本文不作详细剖析,只列出其不同情况下的运动状态,由于麦克纳姆轮的结构特殊性,可以做到左右平移这样的特殊状态。
下图是一个麦克纳姆轮的图片

将其装在小车上时,应注意轮子分布。、
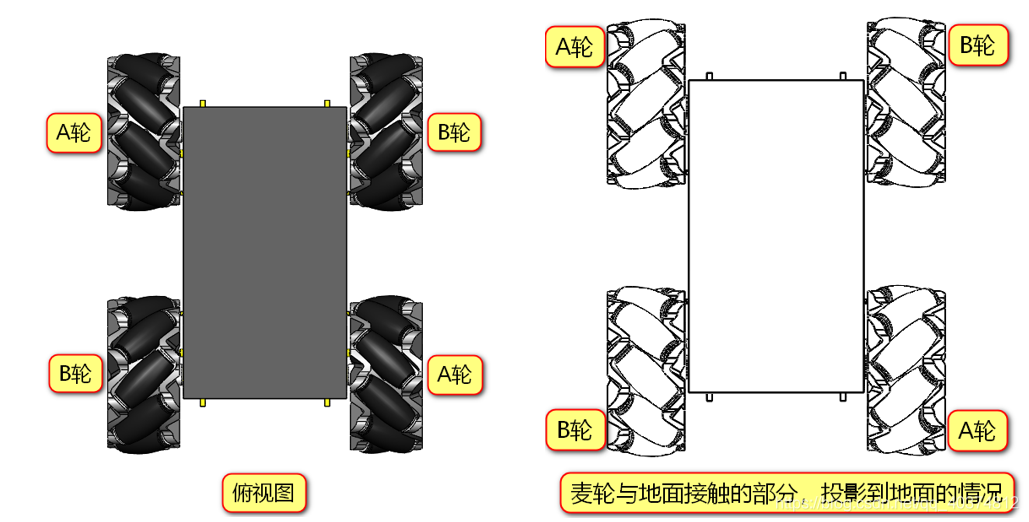
呈现O型或者X型视为正确安装
以下是轮子不同状态下小车最终的运动形态
三、CubeMx配置
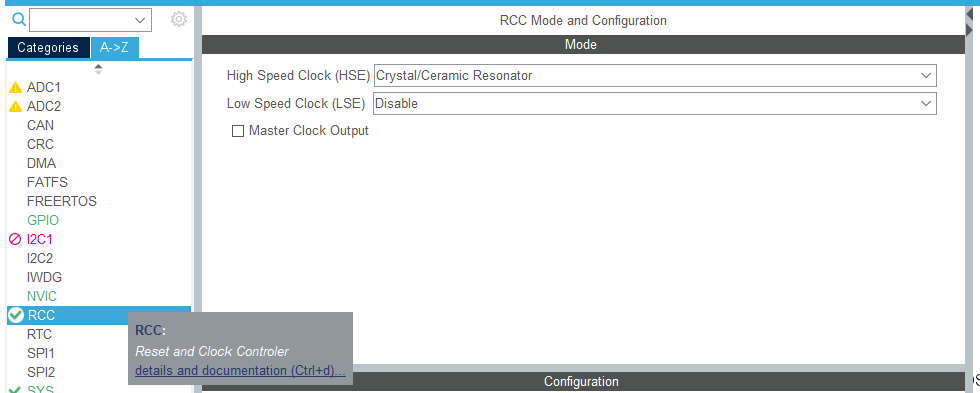
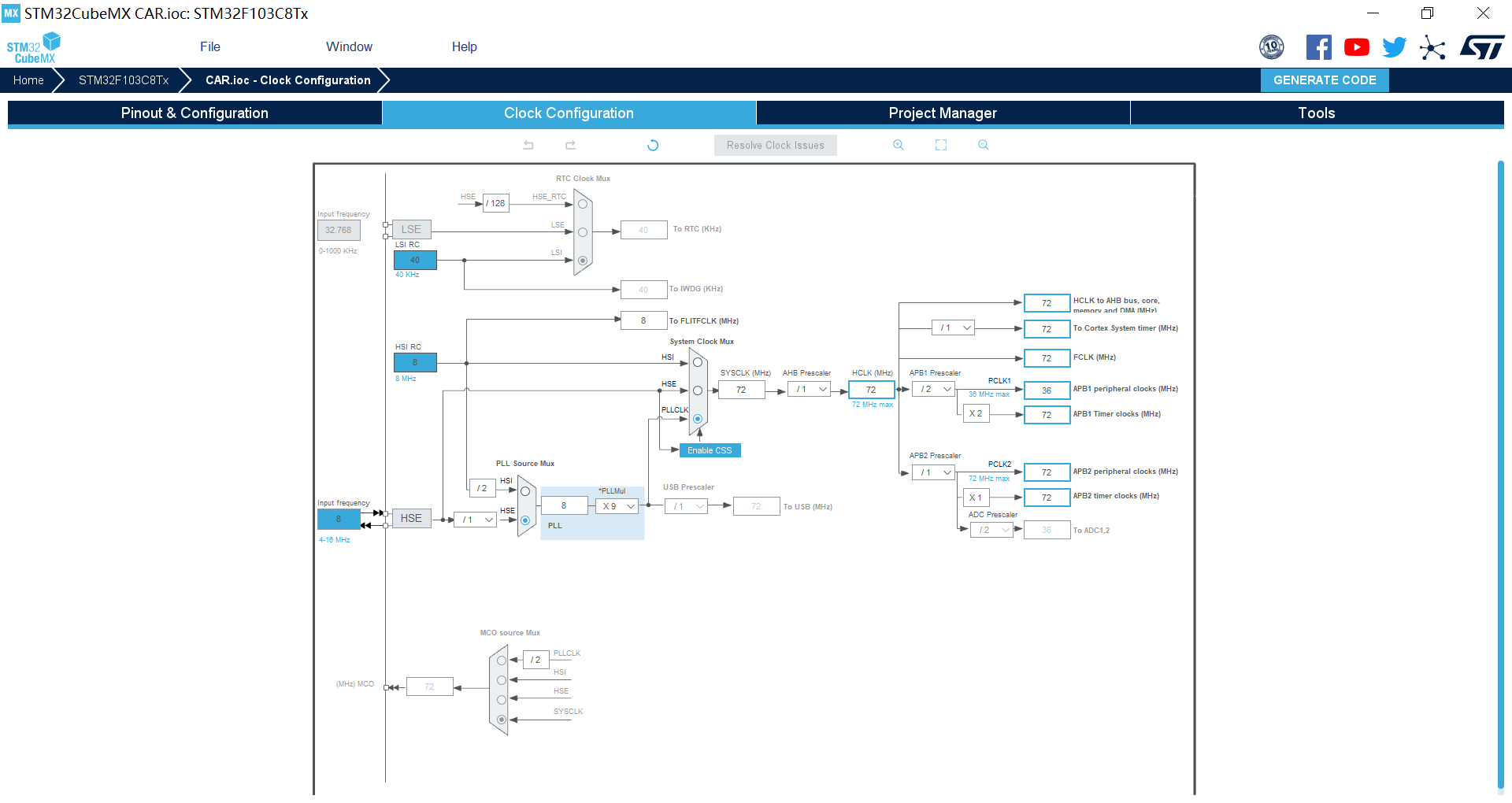
1.RCC
设置完记得调整时钟树F103是72Hz
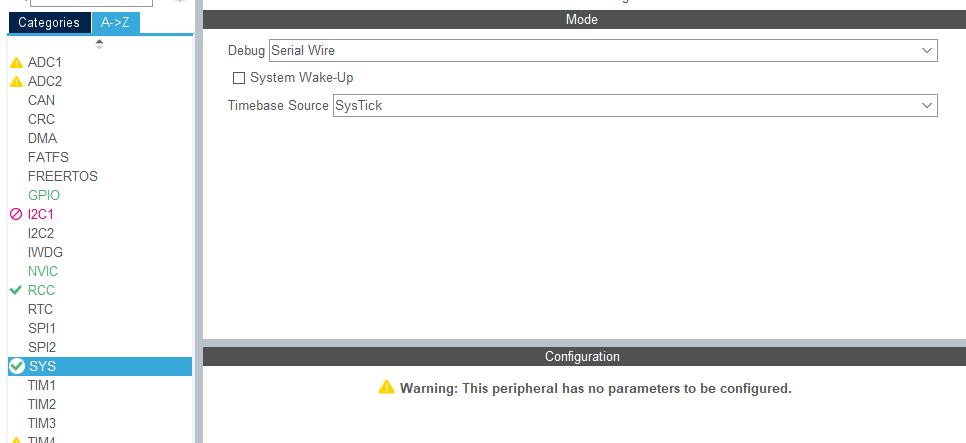
2.SYS
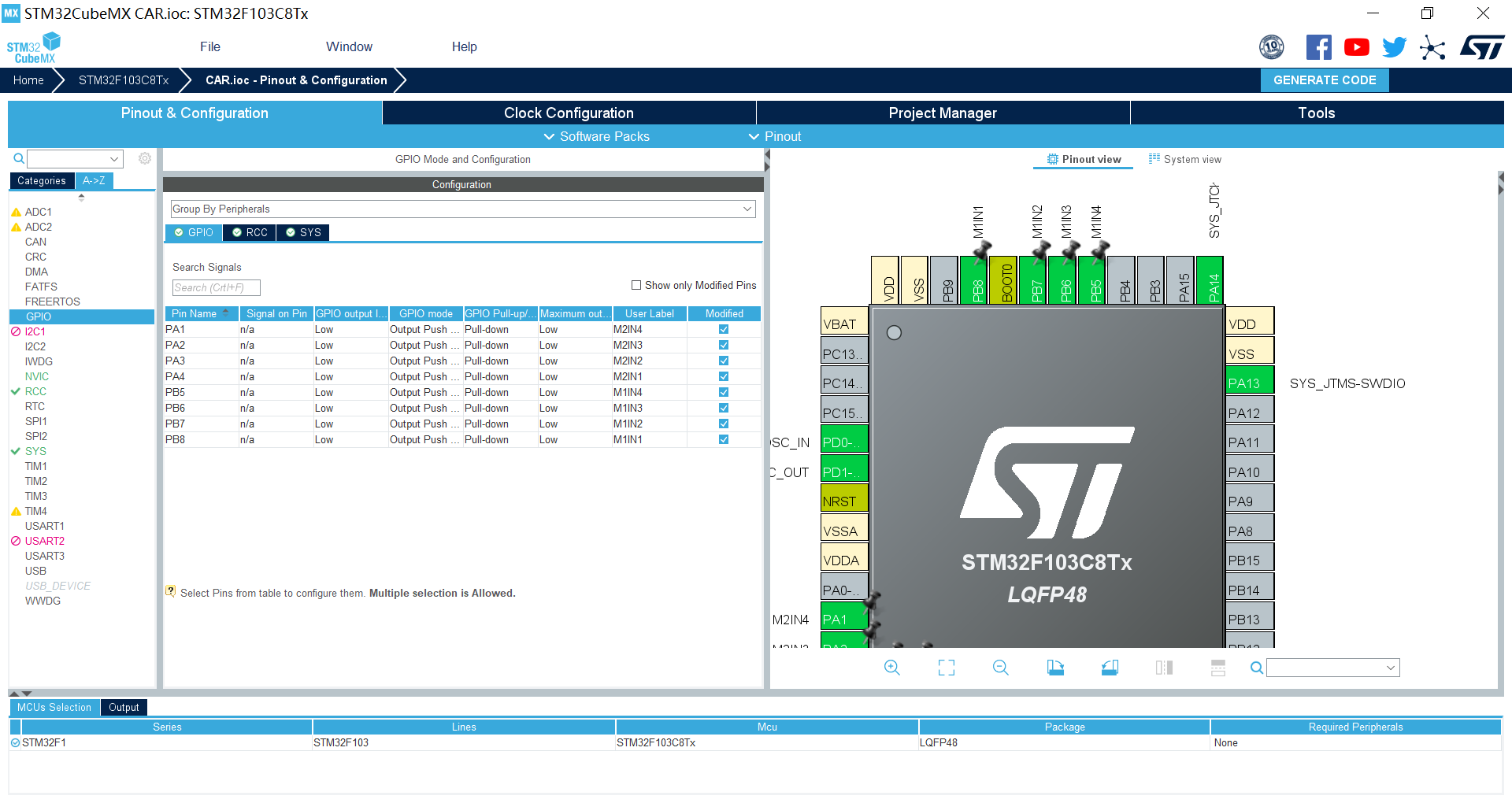
3.GPIO
GPIO的配置如下
generate code生成代码
四、代码
有前文所述L298N原理可知,想要用L298N驱动电机,只需要在相应时刻将其对应引脚电压拉高拉低即可。
main.h
/* USER CODE BEGIN Private defines */
#define M1IN1_0 HAL_GPIO_WritePin(M1IN1_GPIO_Port,M1IN1_Pin,GPIO_PIN_RESET)
#define M1IN1_1 HAL_GPIO_WritePin(M1IN1_GPIO_Port,M1IN1_Pin,GPIO_PIN_SET)
#define M1IN2_0 HAL_GPIO_WritePin(M1IN2_GPIO_Port,M1IN2_Pin,GPIO_PIN_RESET)
#define M1IN2_1 HAL_GPIO_WritePin(M1IN2_GPIO_Port,M1IN2_Pin,GPIO_PIN_SET)
#define M1IN3_0 HAL_GPIO_WritePin(M1IN3_GPIO_Port,M1IN3_Pin,GPIO_PIN_RESET)
#define M1IN3_1 HAL_GPIO_WritePin(M1IN3_GPIO_Port,M1IN3_Pin,GPIO_PIN_SET)
#define M1IN4_0 HAL_GPIO_WritePin(M1IN4_GPIO_Port,M1IN4_Pin,GPIO_PIN_RESET)
#define M1IN4_1 HAL_GPIO_WritePin(M1IN4_GPIO_Port,M1IN4_Pin,GPIO_PIN_SET)
#define M2IN1_0 HAL_GPIO_WritePin(M2IN1_GPIO_Port,M2IN1_Pin,GPIO_PIN_RESET)
#define M2IN1_1 HAL_GPIO_WritePin(M2IN1_GPIO_Port,M2IN1_Pin,GPIO_PIN_SET)
#define M2IN2_0 HAL_GPIO_WritePin(M2IN2_GPIO_Port,M2IN2_Pin,GPIO_PIN_RESET)
#define M2IN2_1 HAL_GPIO_WritePin(M2IN2_GPIO_Port,M2IN2_Pin,GPIO_PIN_SET)
#define M2IN3_0 HAL_GPIO_WritePin(M2IN3_GPIO_Port,M2IN3_Pin,GPIO_PIN_RESET)
#define M2IN3_1 HAL_GPIO_WritePin(M2IN3_GPIO_Port,M2IN3_Pin,GPIO_PIN_SET)
#define M2IN4_0 HAL_GPIO_WritePin(M2IN4_GPIO_Port,M2IN4_Pin,GPIO_PIN_RESET)
#define M2IN4_1 HAL_GPIO_WritePin(M2IN4_GPIO_Port,M2IN4_Pin,GPIO_PIN_SET)
/* USER CODE END Private defines */
main.c
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(100);
forward();
HAL_Delay(5000);
backward();
HAL_Delay(5000);
shift_left();
HAL_Delay(5000);
shift_right();
HAL_Delay(5000);
turn_left();
HAL_Delay(5000);
turn_right();
HAL_Delay(5000);
Reset();
}
/* USER CODE END 3 */
仅仅实现最简单的前进后退左移右移左转右转,如有错误还望指正。
资源链接
最后
以上就是端庄裙子最近收集整理的关于使用STM32F103C8T6控制L298N电机驱动麦克纳姆轮小车(HAL库)一、L298N驱动介绍二、麦克纳姆轮特点及其运动三、CubeMx配置四、代码的全部内容,更多相关使用STM32F103C8T6控制L298N电机驱动麦克纳姆轮小车(HAL库)一、L298N驱动介绍二、麦克纳姆轮特点及其运动三、CubeMx配置四、代码内容请搜索靠谱客的其他文章。








发表评论 取消回复