开发环境的建立
安装虚拟机和Ubuntu20
参考如下链接:
https://fishros.com/d2lros2foxy/#/chapt2/2.1%E7%B3%BB%E7%BB%9F%E5%AE%89%E8%A3%85_%E8%99%9A%E6%8B%9F%E6%9C%BA%E7%89%88%E6%9C%AC
安装VMware Tool
Ubuntu 主机
https://kb.vmware.com/s/article/1022525
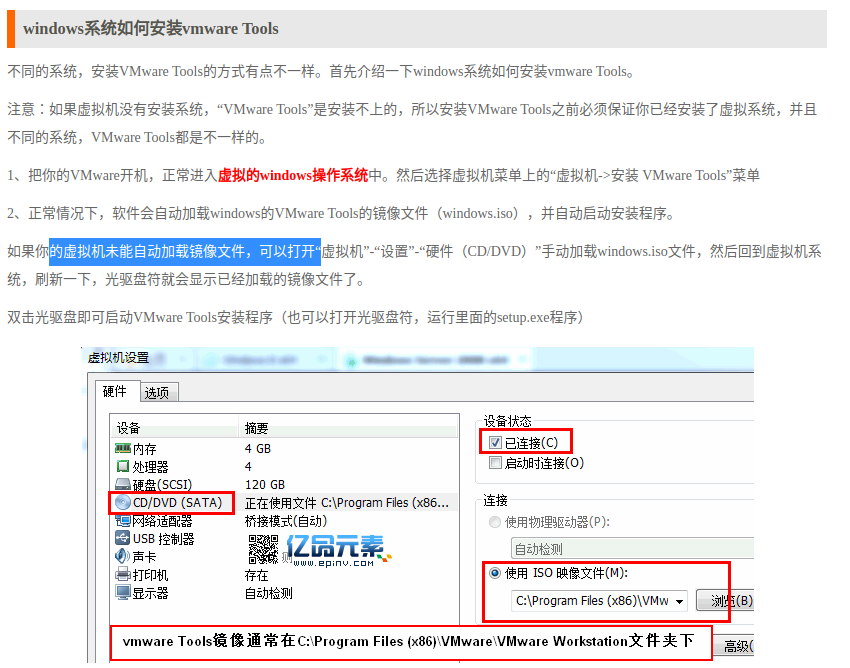
windows主机
https://www.epinv.com/post/5217.html
无法在host机和虚拟机间粘贴文件的问题:
https://blog.csdn.net/sinat_28371057/article/details/109152328
安装ROS2
wget http://fishros.com/install -O fishros && sudo bash fishros
按照脚本提示,安装ROS2 Galactic版本(若出现错误可重新运行脚本尝试)
https://fishros.com/d2lros2foxy/#/chapt2/2.3ROS2%E7%9A%84%E5%AE%89%E8%A3%85
安装vscode
Download Visual Studio Code - Mac, Linux, Windows
sudo dpkg -i code_1.xx.0-1625728071_amd64.deb
在VScode中安装C++,Python,ROS2插件
github下载加速工具
https://ghproxy.com/
添加下面的命令到~/.bashrc文件中
alias cb='colcon build --symlink-install'
alias cbp='colcon build --symlink-install --packages-select'
alias cbns='colcon build'
alias cbpns='colcon build --packages-select '
alias git_pull_all_branch='git branch -r | grep -v "->" | while read remote; do git branch --track "${remote#origin/}" "$remote"; done ; git fetch --all ; git pull --all'
扩展安装oh_myzsh
https://www.jianshu.com/p/4fde9ae77922
本文参考了《鱼香ROS》的文章。请关注“ 鱼香ROS ” 公众号获取更多学习材料。
关注公众号《首飞》回复“机器人”获取精心推荐的C/C++,Python,Docker,Qt,ROS1/2等机器人行业常用技术资料。

最后
以上就是高贵战斗机最近收集整理的关于ROS2开发环境搭建的全部内容,更多相关ROS2开发环境搭建内容请搜索靠谱客的其他文章。








发表评论 取消回复