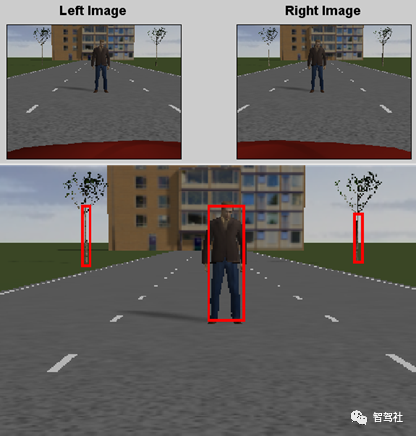
PreScan允许用户将摄像头作为传感器来实现视觉感知的仿真及算法开发。这为诸如使用单目视觉配置的车道偏离警告和使用立体视觉配置的障碍物分割等应用识别道路。这里展示了一个使用立体摄像机进行物体分割的例子,上图为原始图片,下图为识别后的图像。
摄像头传感器的对象配置由以下选项卡组成:
系统
基本错位漂移
摄像机效果
系统对话框
将摄像机拖放到交通参与者上时,将显示以下对话框。
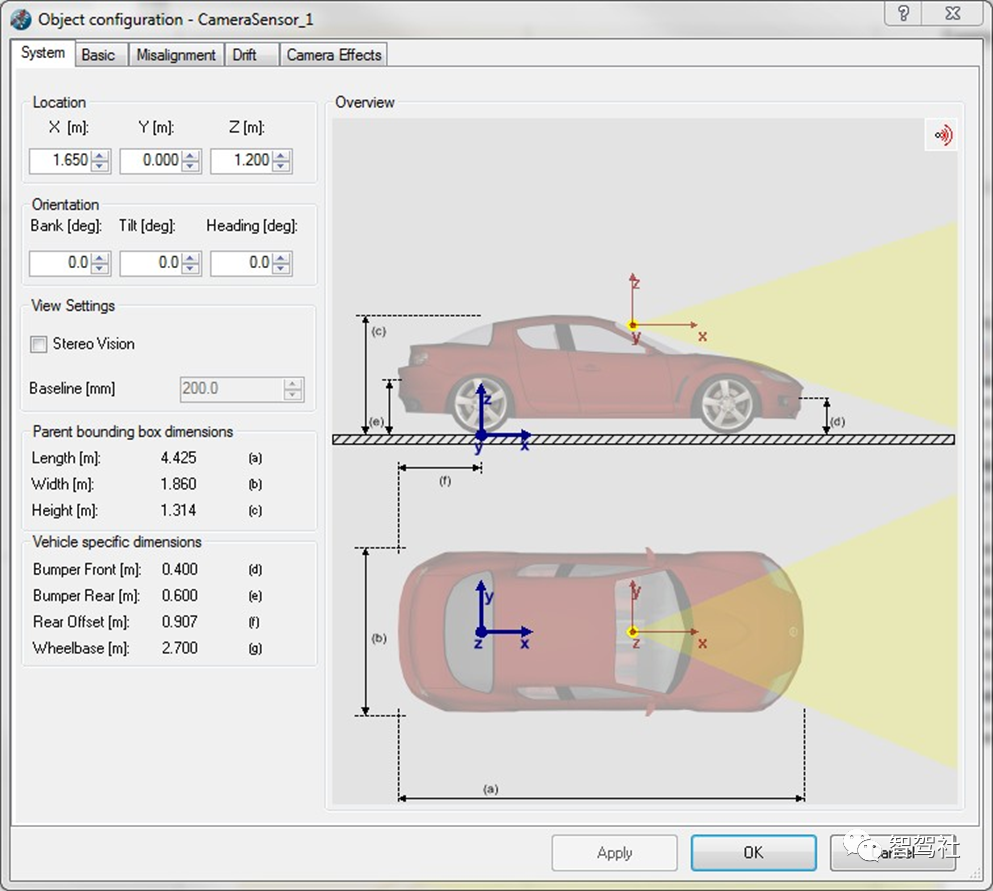
在传感器位置和方向设置之后,用户可以在这里选择单目或立体视觉,并指定基线(两台摄像机之间的距离)。
由于从俯视图的2D表示是固定的,因此在构建区域的PreScan组件和传感器光束方向表示并不完全真实。只有围绕z轴(横摆)的旋转是真实可视化的。围绕x轴(侧倾)和y轴(俯仰)的旋转不能通过对象表示正确可视化。只有轴系统的表示总是正确的。类似的情况也出现在 "构建区域 "中。
对于 Actros 1851 卡
最后
以上就是美丽唇膏最近收集整理的关于PreScan快速入门到精通第三十讲基于PreScan进行摄像头传感器仿真的全部内容,更多相关PreScan快速入门到精通第三十讲基于PreScan进行摄像头传感器仿真内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复