相对定向绝对定向 MFC 实现 CSU摄影测量学
- 相对定向绝对定向 MFC 实现 CSU摄影测量学
- 摄影测量学基础
- 一、 实验目的
- 二、实验内容与要求
- 三、设计与实现:
- 3.1设计思路
- 3.1.1 基本框架:
- 3.1.2 成员关系:
- 3.2 界面设计及属性:
- 3.3 主要代码:
- 3.3.1 文件:Matrix.h
- 3.3.2文件:Math.cpp
- 3.3.3文件:Data.h
- 3.3.4文件:Data.cpp
- 3.3.5文件:Support.h
- 3.3.6文件:Support.cpp
- 3.3.7文件:< RS_110_Z_OrientationOfRe_ObDlg.cpp > (仅摘取部分)
- 3.4运行结果
- 3.5 设计技巧
- 代码虽多不要贪杯~
相对定向绝对定向 MFC 实现 CSU摄影测量学
摄影测量学基础
(工具:VS2010)
一、 实验目的
• 通过对数字影像空间相对定向-绝对定向的程序设计实验,要求我们进一步理解和掌握影像外方位元素的有关理论、原理和方法。掌握VC++.net中创建类
二、实验内容与要求
要求:用C、VB或者Matlab编写空间相对定向——绝对定向计算机程序。
➢提交实验报告:程序框图,程序源代码、计算结果及体会。
➢计算结果:地面点坐标、外方位元素及精度。
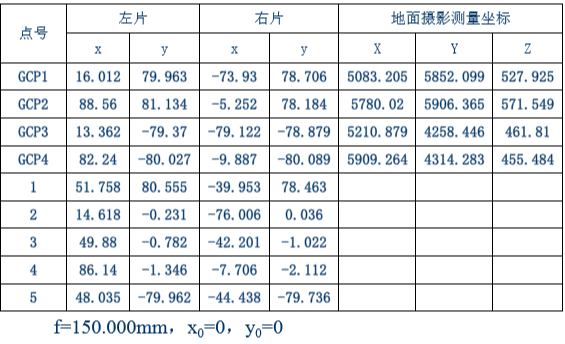
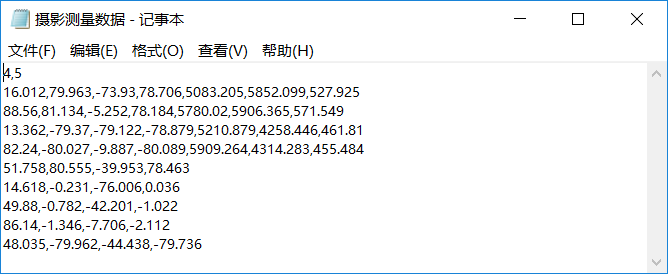
实验数据:
三、设计与实现:
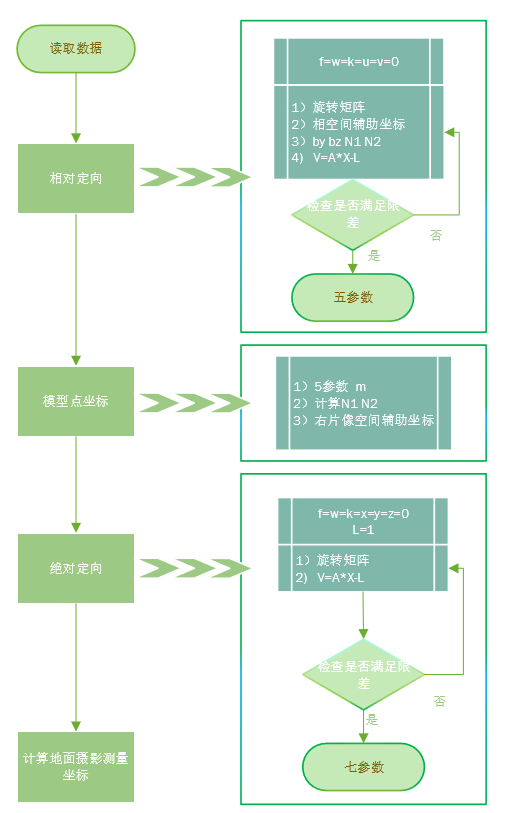
3.1设计思路
3.1.1 基本框架:
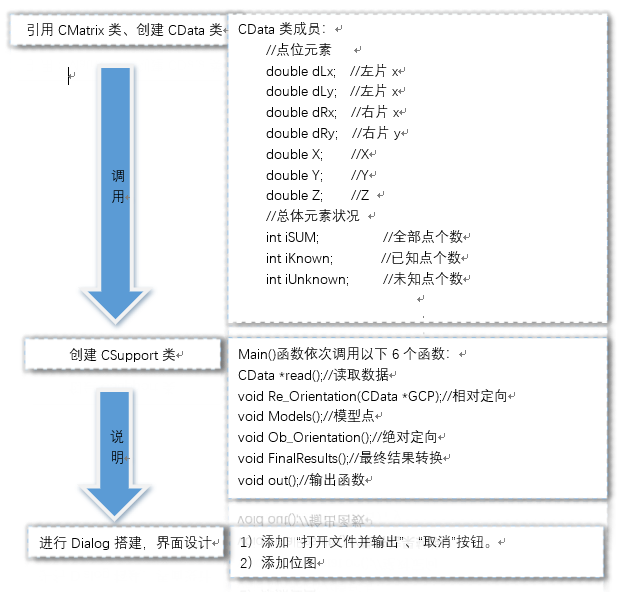
3.1.2 成员关系:
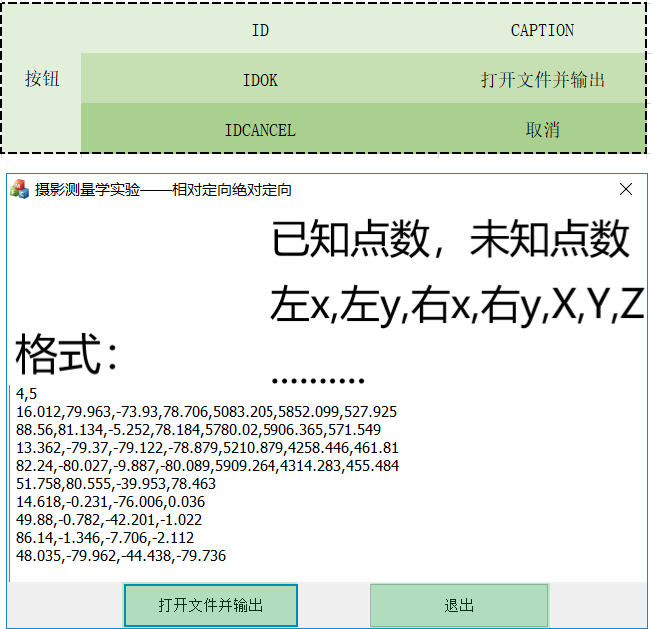
3.2 界面设计及属性:
3.3 主要代码:
3.3.1 文件:Matrix.h
/***************************************************************************
* 文件名:<Matrix.h> *
* *
* 描述:矩阵类 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年4月19日 引用 *** *
* *
* 外部过程: *
* *
/**************************************************************************/
#pragma once
class CMatrix
{
public:
CMatrix(int row=3,int col=3);
// copy constructor
CMatrix (const CMatrix& m);
~CMatrix(void);
private:
double **dMatData;//保存矩阵元素数据的二维数组
int iRow;//矩阵的行
int iCol;//矩阵的列
public:
int Row() const {return iRow;}//返回行
int Col() const {return iCol;}//返回列
void SetSize (int row, int col);//调整数组的大小,原有数据不变(未测试)
double& operator () (int row, int col);//获取矩阵元素
double operator () (int row, int col) const;//重载获取矩阵元素函数,只有const对象能访问
CMatrix& operator = (const CMatrix& m) ;
//注意:友元函数并不是类自己的成员函数
friend CMatrix operator + (const CMatrix& m1,const CMatrix& m2);
friend CMatrix operator - (const CMatrix& m1,const CMatrix& m2);
friend CMatrix operator * (const CMatrix& m1,const CMatrix& m2);
friend CMatrix operator * (const double& num, const CMatrix& m1);
friend CMatrix operator * (const CMatrix& m1,const double& num);
friend CMatrix operator ~ (const CMatrix& m);//矩阵转置
CMatrix Inv();//矩阵求逆
void Unit();//生成单位矩阵
};
3.3.2文件:Math.cpp
#include "StdAfx.h"
#include "Matrix.h"
#include "math.h"
CMatrix::CMatrix(int row,int col)
{
iRow=row;
iCol=col;
dMatData = new double*[row];
for (int i=0; i < row; i++)
{
dMatData[i]= new double[col];
for(int j=0;j<col;j++)
{
dMatData[i][j]=0;
}
}
}
// copy constructor,
//拷贝构造函数的作用:
//(1)以类对象作为函数参数传值调用时;
//(2)函数返回值为类对象;
//(3)用一个已定义的对象去初始化一个新对象时;
CMatrix::CMatrix (const CMatrix& m)
{
iRow=m.Row();
iCol=m.Col();
dMatData = new double*[iRow];
for (int i=0; i < iRow; i++)
{
dMatData[i]= new double[iCol];
// for(int j=0;j<iCol;j++)
{
memcpy(dMatData[i],m.dMatData[i],sizeof(double)*iCol);
}
}
}
CMatrix::~CMatrix(void)
{
for (int i=0; i < iRow; i++)
{
delete[] dMatData[i];
}
delete[] dMatData;
}
//返回数组元素(引用返回)
double& CMatrix::operator () (int row, int col)
{
if (row >= iRow || col >= iCol)
{
throw( "CMatrix::operator(): Index out of range!");
}
return dMatData[row][col];
}
返回数组元素(重载)
double CMatrix::operator () (int row, int col) const
{
if (row >= iRow || col >= iCol)
{
throw( "CMatrix::operator(): Index out of range!");
}
return dMatData[row][col];
}
//重载预算符+
CMatrix operator + (const CMatrix& m1,const CMatrix& m2)
{
if((m1.Col()!=m2.Col()) ||(m1.Row()!=m2.Row()) )
{
throw( "CMatrix::operator+: The two matrix have different size!");
}
CMatrix matTmp(m1.Row(),m1.Col());
for(int i=0;i<m1.Row();i++)
{
for(int j=0;j<m1.Col();j++)
{
matTmp(i,j)=m1(i,j)+m2(i,j);
}
}
return matTmp;
}
//重载赋值运算符=,当左右两边矩阵的大小不相等时,
//以右边的大小为基准,调整左边矩阵的大小
CMatrix &CMatrix::operator = (const CMatrix& m)
{
//revised in 2011-4-1, by Daiwujiao
// if(iRow!=m.Row()||iCol!=m.Col())
//{
// throw( "CMatrix::operator=: The two matrix have different size!");
//}
if(iRow!=m.Row()||iCol!=m.Col())
{
SetSize(m.Row(),m.Col());
}
for (int i=0; i < iRow; i++)
{
for(int j=0;j<iCol;j++)
{
dMatData[i][j]=m(i,j);
}
}
return *this;
}
//调整矩阵大小,原有值不变
void CMatrix::SetSize (int row, int col)
{
if (row == iRow && col == iCol)
{
return;
}
double **rsData = new double*[row];
for (int i=0; i < row; i++)
{
rsData[i]= new double[col];
for(int j=0;j<col;j++)
{
rsData[i][j]=0;
}
}
int minRow=(iRow>row)?row:iRow;
int minCol= (iCol>col)?col:iCol;
int colSize = minCol * sizeof(double);
for (int i=0; i < minRow; i++)
{
memcpy( rsData[i], dMatData[i], colSize);
}
for (int i=0; i < minRow; i++)
{
delete[] dMatData[i];
}
delete[] dMatData;
dMatData=rsData;
iRow=row;
iCol=col;
return;
}
//重载预算符-
CMatrix operator - (const CMatrix& m1,const CMatrix& m2)
{
if((m1.Col()!=m2.Col()) ||(m1.Row()!=m2.Row()) )
{
throw( "CMatrix::operator-: The two matrix have different size!");
}
CMatrix matTmp(m1.Row(),m1.Col());
for(int i=0;i<m1.Row();i++)
{
for(int j=0;j<m1.Col();j++)
{
matTmp(i,j)=m1(i,j)-m2(i,j);
}
}
return matTmp;
}
//重载预算符*,两个矩阵相乘,m1的列要等于m2的行
CMatrix operator * (const CMatrix& m1,const CMatrix& m2)
{
if((m1.Col()!=m2.Row()))
{
throw( "CMatrix::operator*: The col of matrix m1 doesn't equ to row of m2 !");
}
CMatrix matTmp(m1.Row(),m2.Col());
for(int i=0;i<m1.Row();i++)
{
for(int j=0;j<m2.Col();j++)
{
for(int k=0;k<m2.Row();k++)
{
matTmp(i,j)+=m1(i,k)*m2(k,j);
}
}
}
return matTmp;
}
//重载预算符*,矩阵右乘一个数
CMatrix operator * (const CMatrix& m1,const double& num)
{
CMatrix matTmp(m1.Row(),m1.Col());
for(int i=0;i<m1.Row();i++)
{
for(int j=0;j<m1.Col();j++)
{
matTmp(i,j)=m1(i,j)*num;
}
}
return matTmp;
}
//重载预算符*,矩阵左乘一个数
CMatrix operator * (const double& num, const CMatrix& m1)
{
CMatrix matTmp(m1.Row(),m1.Col());
for(int i=0;i<m1.Row();i++)
{
for(int j=0;j<m1.Col();j++)
{
matTmp(i,j)=m1(i,j)*num;
}
}
return matTmp;
}
//矩阵转置
CMatrix operator ~ (const CMatrix& m)
{
CMatrix matTmp(m.Col(),m.Row());
for (int i=0; i < m.Row(); i++)
for (int j=0; j < m.Col(); j++)
{
matTmp(j,i) = m(i,j);
}
return matTmp;
}
//矩阵求逆
//采用选全主元法
CMatrix CMatrix::Inv()
{
if (iRow!=iCol)
{
throw("待求逆的矩阵行列不相等!");
}
int i, j, k, vv;
CMatrix InvMat(iRow,iRow);
//复制矩阵
InvMat=*this;
int* MainRow=new int[iRow];
int* MainCol=new int[iRow];//用于记录主元素的行和列
double dMainCell;//主元元素的值
double dTemp;//临时变量
for(k = 0;k<iRow;k++)
{
dMainCell = 0;
//选全主元
for( i = k;i<iRow ;i++)
{
for( j = k;j<iRow;j++)
{
dTemp = fabs(InvMat(i, j));
if(dTemp > dMainCell)
{
dMainCell = dTemp;
MainRow[k] = i;
MainCol[k] = j;
}
}
}
if( fabs(dMainCell) < 0.0000000000001)//矩阵秩亏,不能求逆
{
throw("矩阵秩亏");
}
if(MainRow[k] != k)//交换行
{
for( j = 0 ;j<iRow;j++)
{
vv = MainRow[k];
dTemp = InvMat(k, j);
InvMat(k, j) = InvMat(vv, j);
InvMat(vv, j) = dTemp;
}
}
if(MainCol[k] != k)//交换列
{
for(i = 0;i<iRow;i++)
{
vv = MainCol[k];
dTemp = InvMat(i, k);
InvMat(i, k) = InvMat(i, vv);
InvMat(i, vv) = dTemp;
}
}
InvMat(k, k) = 1.0 / InvMat(k, k);//计算乘数
for( j = 0;j< iRow;j++) //计算主行
{
if(j != k)
{
InvMat(k, j) = InvMat(k, j) * InvMat(k, k);
}
}
for(i = 0;i<iRow;i++)//消元
{
if( i !=k)
{
for(j = 0;j<iRow;j++)
{
if(j != k)
{
InvMat(i, j) -= InvMat(i, k) * InvMat(k, j);
}
}
}
}
for( i = 0;i< iRow;i++ )//计算主列
{
if( i != k)
{
InvMat(i, k) = -InvMat(i, k) * InvMat(k, k);
}
}
}
for( k = iRow - 1;k>=0;k--)
{
if(MainCol[k] != k)// 交换行
{
for( j = 0;j<iRow;j++)
{
vv = MainCol[k];
dTemp = InvMat(k, j);
InvMat(k, j) = InvMat(vv, j);
InvMat(vv, j) = dTemp;
}
}
if(MainRow[k] != k)//交换列
{
for( i = 0;i<iRow;i++)
{
vv = MainRow[k];
dTemp = InvMat(i, k);
InvMat(i, k) = InvMat(i, vv);
InvMat(i, vv) = dTemp;
}
}
}
delete[] MainRow;
delete[] MainCol;
return InvMat;
}
//单位化矩阵
void CMatrix::Unit()
{
for(int i=0;i<iRow;i++)
{
for(int j=0;j<iCol;j++)
{
dMatData[i][j]=(i==j)?1:0;
}
}
}
3.3.3文件:Data.h
/***************************************************************************
* 文件名:<Data.h> *
* *
* 描述:储存主要元素 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年4月19日 引用 *** *
* *
* 外部过程: *
* *
/**************************************************************************/
#pragma once
class CData
{
public:
CData(void);
~CData(void);
//点位元素
double dLx; //左片x
double dLy; //左片x
double dRx; //右片x
double dRy; //右片y
double X; //X
double Y; //Y
double Z; //Z
//总体元素状况
int iSUM; //全部点个数
int iKnown; //已知点个数
int iUnknown; //未知点个数
};
3.3.4文件:Data.cpp
#include "StdAfx.h"
#include "Data.h"
CData::CData(void)
{
}
CData::~CData(void)
{
}
3.3.5文件:Support.h
/***************************************************************************
* 文件名:<Support.h> *
* *
* 描述:封装所有函数的类、调用矩阵CMatrix类、CData类 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建 *** *
* *
* 外部过程: *
* *
/**************************************************************************/
#pragma once
#include "Data.h"
#include "math.h"
#include "Matrix.h"
#include <locale.h>
class CSupport
{
private:
int counter_01;//相对定向迭代次数
int counter_02;//绝对定向迭代次数
double a1;//精度
double a2;//精度
CData *GCP;//储存具体元素
CData b;//储存元素概况
double length(double x1,double y1,double x2,double y2);//长度函数
CString * SplitString(CString str, char split, int& iSubStrs);//分割函数
void R1(CMatrix &R,double FA,double W,double K );//R矩阵
//相对定向
CMatrix X;//用来储存计算出的X
CMatrix R;//用来储存旋转元素
//模型点
CMatrix P;//models
//绝对定向
CMatrix Obs_X;
private:
CData *read();//读取数据
void Re_Orientation(CData *GCP);//相对定向
void Models();//模型点
void Ob_Orientation();//绝对定向
void FinalResults();//最终结果转换
void out();//输出函数
public:
CSupport(void);
~CSupport(void);
void main();//主函数
};
3.3.6文件:Support.cpp
#include "StdAfx.h"
#include "Support.h"
#define f 0.15;
CSupport::CSupport(void)
{
}
CSupport::~CSupport(void)
{
}
/***************************************************************************
* 名字:void CSupport::R1(CMatrix &R,CMatrix X ) *
* *
* 描述:R矩阵赋值 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年4月20日 创建该函数 *** *
* 参数: 1.CMatrix &R //R矩阵 (3,3) *
* 2.CMatrix X // X矩阵(6,1) *
* 返回值:无 *
* *
* 注: *
/**************************************************************************/
void CSupport::R1(CMatrix &R,double FA,double W,double K )
{
R(0,0)=cos(FA)*cos(K)-sin(FA)*sin(W)*sin(K);
R(0,1)=-cos(FA)*sin(K)-sin(FA)*sin(W)*cos(K);
R(0,2)=-sin(FA)*cos(W);
R(1,0)=cos(W)*sin(K);
R(1,1)=cos(W)*cos(K);
R(1,2)=-sin(W);
R(2,0)=sin(FA)*cos(K)+cos(FA)*sin(W)*sin(K);
R(2,1)=-sin(FA)*sin(K)+cos(FA)*sin(W)*cos(K);
R(2,2)=cos(FA)*cos(W);
}
/***************************************************************************
* 名字:double length(double x1,double y1,double x2,double y2) *
* *
* 描述:由(x1,y1)和(x2,y2)计算两点之间距离 长度 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年3月20日 创建该函数 *** *
* 参数: 1.double x1 *
* 2.double y1 *
* 3.double x2 *
* 4.double y2 *
* 返回值:double类型数据 返回距离 *
* *
* 注: *
/**************************************************************************/
double CSupport::length(double x1,double y1,double x2,double y2)
{
double tmp=((x1-x2)*(x1-x2)+(y1-y2)*(y1-y2));
return sqrt(tmp);
}
/***************************************************************************
* 名字:CString * CSupport::SplitString(CString str, char split, int& iSubStrs)*
* *
* 描述:字符串分割函数2 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建该函数 *** *
* 参数: 1.CString str *
* 2.char split *
* 3.int& iSubStrs *
* 返回值:返回指针 指针带有动态数组的内容 *
* *
* 注: *
/**************************************************************************/
CString * CSupport::SplitString(CString str, char split, int& iSubStrs)
{
int iPos = 0; //分割符位置
int iNums = 0; //分割符的总数
CString strTemp = str;
CString strRight;
//先计算子字符串的数量
while (iPos != -1)
{
iPos = strTemp.Find(split);
if (iPos == -1)
{
break;
}
strRight = strTemp.Mid(iPos + 1, str.GetLength());
strTemp = strRight;
iNums++;
}
if (iNums == 0) //没有找到分割符
{
//子字符串数就是字符串本身
iSubStrs = 1;
return NULL;
}
//子字符串数组
iSubStrs = iNums + 1; //子串的数量 = 分割符数量 + 1
CString* pStrSplit;
pStrSplit = new CString[iSubStrs];
strTemp = str;
CString strLeft;
for (int i = 0; i < iNums; i++)
{
iPos = strTemp.Find(split);
//左子串
strLeft = strTemp.Left(iPos);
//右子串
strRight = strTemp.Mid(iPos + 1, strTemp.GetLength());
strTemp = strRight;
pStrSplit[i] = strLeft;
}
pStrSplit[iNums] = strTemp;
return pStrSplit;
}
/***************************************************************************
* 名字:CData * CSupport::read(CString &strView) *
* *
* 描述:读取函数 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建该函数 *** *
* 参数: 1.CString &strView *
* 返回值:返回开辟动态数组的首地址 另外将提取的值赋给strView *
* *
* 注: *
/**************************************************************************/
CData *CSupport::read()
{
CFileDialog dlgFile(TRUE,_T("txt"),NULL,
OFN_ALLOWMULTISELECT|OFN_EXPLORER,
//_T("(文本文件)|*.txt"));
_T(""));
if(dlgFile.DoModal()==IDCANCEL) return NULL;
CString strName=dlgFile.GetPathName();//获取打开文件文件名(路径)
setlocale(LC_ALL,"");
CStdioFile sf;
if(! sf.Open(strName,CFile::modeRead)) return NULL;
CString strLine;
CString strContent;//接受内容字符串
strContent.Empty();
BOOL bEOF =sf.ReadString (strLine);
if(!bEOF)
{
AfxMessageBox(_T("数据有误,请检查数据文件!"));
return NULL;
}
int n=0;//为下文读取做铺垫
CString *pstrData =SplitString(strLine,',',n);
b.iKnown=_ttoi(pstrData[0]);
b.iUnknown=_ttoi(pstrData[1]);
b.iSUM=b.iKnown+b.iUnknown;
delete [] pstrData;
pstrData=NULL;
GCP=new CData [b.iSUM];//创建动态数组
int i=0;
while (bEOF)
{
bEOF=sf.ReadString(strLine);
CString *pstrData =SplitString(strLine,',',n);
if(pstrData==NULL) continue;
if(i<b.iKnown)
{
GCP[i].dLx=_tstof(pstrData[0])/1000;
GCP[i].dLy=_tstof(pstrData[1])/1000;
GCP[i].dRx=_tstof(pstrData[2])/1000;
GCP[i].dRy=_tstof(pstrData[3])/1000;
GCP[i].X=_tstof(pstrData[4]);
GCP[i].Y=_tstof(pstrData[5]);
GCP[i].Z=_tstof(pstrData[6]);
}
else if(i<b.iSUM)
{
GCP[i].dLx=_tstof(pstrData[0])/1000;
GCP[i].dLy=_tstof(pstrData[1])/1000;
GCP[i].dRx=_tstof(pstrData[2])/1000;
GCP[i].dRy=_tstof(pstrData[3])/1000;
}
i++;
delete [] pstrData;
pstrData=NULL;
}
sf.Close();
return GCP;
}
/***************************************************************************
* 名字:void CSupport::Re_Orientation(CData *GCP) *
* *
* 描述:相对定向 进行数据加工 得出5个元素 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建该函数 *** *
* 参数: 1.CData *GCP 储存数组元素 *
* 返回值:返回指针 指针带有动态数组的内容 *
* *
* 注: *
/**************************************************************************/
void CSupport::Re_Orientation(CData *GCP)
{
//初始化
counter_01=0;
X.SetSize(5,1);
R.SetSize(3,3);
CMatrix _x(5,1),A(6,5),L(6,1);
for (int i=0;i<5;i++)
{
X(i,0)=0;
}
double bx=GCP[0].dLx-GCP[0].dRx;
do
{
R1(R,X(0,0),X(1,0),X(2,0));
for (int i = 0; i < 6; i++)
{
CMatrix L_XYZ(3,1);
CMatrix R_XYZ(3,1);
L_XYZ(0,0)=GCP[i].dLx;//X1
L_XYZ(1,0)=GCP[i].dLy;//Y1
L_XYZ(2,0)=-f; //Z1
R_XYZ(0,0)=GCP[i].dRx;//X2
R_XYZ(1,0)=GCP[i].dRy;//Y2
R_XYZ(2,0)=-f; //Z2
R_XYZ=R*R_XYZ;
double by=bx*X(3,0);
double bz=bx*X(4,0);
double N1=(bx*R_XYZ(2,0)-bz*R_XYZ(0,0))/(L_XYZ(0,0)*R_XYZ(2,0)-R_XYZ(0,0)*L_XYZ(2,0));
double N2=(bx*L_XYZ(2,0)-bz*L_XYZ(0,0))/(L_XYZ(0,0)*R_XYZ(2,0)-R_XYZ(0,0)*L_XYZ(2,0));
double Q=N1*L_XYZ(1,0)-N2*R_XYZ(1,0)-by;
L(i,0)=Q;
A(i,0)=-R_XYZ(0,0)*R_XYZ(1,0)*N2/R_XYZ(2,0);
A(i,1)=-(R_XYZ(2,0)+R_XYZ(1,0)*R_XYZ(1,0)/R_XYZ(2,0))*N2;
A(i,2)=R_XYZ(0,0)*N2;
A(i,3)=bx;
A(i,4)=-R_XYZ(1,0)*bx/R_XYZ(2,0);
}
_x=(~A*A).Inv()*~A*L;
X=X+_x;
counter_01++;
double mmm[5];
mmm[0]=_x(0,0);
mmm[1]=_x(1,0);
mmm[2]=_x(2,0);
mmm[3]=_x(3,0);
mmm[4]=_x(4,0);
}
while(fabs(_x(0, 0))>0.00003||fabs(_x(1, 0))>0.00003||fabs(_x(2, 0))>0.00003||fabs(_x(3, 0))>0.00003||fabs(_x(4, 0))>0.00003);
CMatrix V;
V=A*_x-L;
a1=sqrt((~V*V)(0, 0)/6);
}
/***************************************************************************
* 名字:void CSupport::Models() *
* *
* 描述:模型点计算 计算每个点的值,并将其储存至P中 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建该函数 *** *
* 参数: 无 *
* 返回值:无 *
* *
* 注: *
/**************************************************************************/
void CSupport::Models()
{
P.SetSize(9,3);
double L_m=length(GCP[0].dLx,GCP[0].dLy,GCP[1].dLx,GCP[1].dLy);
double R_m=length(GCP[0].dRx,GCP[0].dRy,GCP[1].dRx,GCP[1].dRy);
//double m=L_m/R_m;
double m=10000;
R1(R,X(0,0),X(1,0),X(2,0));
CMatrix L_XYZ(3,1);
CMatrix R_XYZ(3,1);
for (int i = 0; i < 9; i++)
{
L_XYZ(0,0)=GCP[i].dLx;//X1
L_XYZ(1,0)=GCP[i].dLy;//Y1
L_XYZ(2,0)=-f; //Z1
R_XYZ(0,0)=GCP[i].dRx;//X2
R_XYZ(1,0)=GCP[i].dRy;//Y2
R_XYZ(2,0)=-f; //Z2
R_XYZ=R*R_XYZ;
double bx=GCP[0].dLx-GCP[0].dRx;
double by=bx*X(3,0);
double bz=bx*X(4,0);
double N1=(bx*R_XYZ(2,0)-bz*R_XYZ(0,0))/(L_XYZ(0,0)*R_XYZ(2,0)-R_XYZ(0,0)*L_XYZ(2,0));
double N2=(bx*L_XYZ(2,0)-bz*L_XYZ(0,0))/(L_XYZ(0,0)*R_XYZ(2,0)-R_XYZ(0,0)*L_XYZ(2,0));
double df=0.15;
double xp = m*N1*L_XYZ(0,0);
double yp = 0.5*m*(N1*L_XYZ(1,0)+N2*R_XYZ(1, 0)+by);
double tmp = L_XYZ(2,0);
double zp = df*m*(1-N1);
P(i,0)=xp;
P(i,1)=yp;
P(i,2)=zp;
}
}
/***************************************************************************
* 名字:void CSupport::Ob_Orientation() *
* *
* 描述:绝对定向 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建该函数 *** *
* 参数: 无 *
* 返回值:无 *
* *
* 注: *
/**************************************************************************/
void CSupport::Ob_Orientation()
{
counter_02=0;
Obs_X.SetSize(7,1);
for (int i=0;i<7;i++)
{
Obs_X(i,0)=0;
}
Obs_X(3,0)=1;
CMatrix Obs_A(12, 7),Obs_L(12, 1),Obs_V(12, 1),Obs_R(3,3),Obs__x(7,1);
do
{
for(int i=0;i<4;i++)
{
R1(Obs_R,Obs_X(4,0),Obs_X(5,0),Obs_X(6,0));
//对A矩阵赋值
double _XP=P(i,0);
double _YP=P(i,1);
double _ZP=P(i,2);
Obs_A(3*i,0)=1;
Obs_A(3*i,1)=0;
Obs_A(3*i,2)=0;
Obs_A(3*i,3)=_XP;
Obs_A(3*i,4)=-_ZP;
Obs_A(3*i,5)=0;
Obs_A(3*i,6)=-_YP;
Obs_A(3*i+1,0)=0;
Obs_A(3*i+1,1)=1;
Obs_A(3*i+1,2)=0;
Obs_A(3*i+1,3)=_YP;
Obs_A(3*i+1,4)=0;
Obs_A(3*i+1,5)=-_ZP;
Obs_A(3*i+1,6)=_XP;
Obs_A(3*i+2,0)=0;
Obs_A(3*i+2,1)=0;
Obs_A(3*i+2,2)=1;
Obs_A(3*i+2,3)=_ZP;
Obs_A(3*i+2,4)=_XP;
Obs_A(3*i+2,5)=_YP;
Obs_A(3*i+2,6)=0;
//对Obs_L(12, 1)赋值
CMatrix XYZ_TP(3,1);
CMatrix XYZ_P(3,1);
CMatrix temp_P(3,1);
CMatrix temp_L(3,1);
XYZ_TP(0,0)=GCP[i].X;
XYZ_TP(1,0)=GCP[i].Y;
XYZ_TP(2,0)=GCP[i].Z;
XYZ_P(0,0)=P(i,0);
XYZ_P(1,0)=P(i,1);
XYZ_P(2,0)=P(i,2);
temp_P(0,0)=Obs_X(0,0);
temp_P(1,0)=Obs_X(1,0);
temp_P(2,0)=Obs_X(2,0);
temp_L=XYZ_TP-Obs_X(3,0)*Obs_R*XYZ_P-temp_P;
Obs_L(3*i, 0)=temp_L(0,0);
Obs_L(3*i+1, 0)=temp_L(1,0);
Obs_L(3*i+2, 0)=temp_L(2,0);
}
Obs__x=(~Obs_A*Obs_A).Inv()*~Obs_A*Obs_L;
Obs_X=Obs_X+Obs__x;
counter_02++;
}while(fabs(Obs__x(0, 0))>0.001||fabs(Obs__x(1, 0))>0.001||fabs(Obs__x(2, 0))>0.001||fabs(Obs__x(3, 0))>0.001||fabs(Obs__x(4, 0))>0.001||fabs(Obs__x(5, 0))>0.001||fabs(Obs__x(6, 0))>0.001);
CMatrix V;
V=Obs_A*Obs__x-Obs_L;
a2=sqrt((~V*V)(0, 0)/4);
}
/***************************************************************************
* 名字:void CSupport::FinalResults() *
* *
* 描述:进行坐标的最后转化,得以输出 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建该函数 *** *
* 参数: 无 *
* 返回值:无 *
* *
* 注: *
/**************************************************************************/
void CSupport::FinalResults()
{
for(int i=b.iKnown;i<b.iSUM;i++)
{
CMatrix temp_P(3,1);
CMatrix temp_dX(3,1);
temp_P(0,0)=P(i,0);
temp_P(1,0)=P(i,1);
temp_P(2,0)=P(i,2);
temp_dX(0,0)=Obs_X(0,0);
temp_dX(1,0)=Obs_X(1,0);
temp_dX(2,0)=Obs_X(2,0);
CMatrix temp_final;
CMatrix final_R(3,3);
R1(final_R,Obs_X(4,0),Obs_X(5,0),Obs_X(6,0));
temp_final=Obs_X(3,0)*final_R*temp_P+temp_dX;//关键步骤
GCP[i].X=temp_final(0,0);
GCP[i].Y=temp_final(1,0);
GCP[i].Z=temp_final(2,0);
}
}
/***************************************************************************
* 名字:void CSupport::out() *
* *
* 描述:输出函数 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建该函数 *** *
* 参数: 无 *
* 返回值:无 *
* *
* 注: *
/**************************************************************************/
void CSupport::out()
{
CString strOut;
CString Result1;
//相对定向
for(int i=0;i<5;i++)
{
Result1.Format(_T("%frn"),X(i,0));
strOut+=Result1;
}
Result1.Format(_T("%s%.9f%srn"),
_T("--------- 相对定向精度:"),
a1,
_T("")
);
strOut+=Result1;
Result1.Format(_T("%s%drn"),
_T("--------- 迭代次数:"),
counter_01
);
strOut+=Result1;
Result1.Format(_T("%srn"),
_T("---------------------------------------------------------------")
);
strOut+=Result1;
//模型点坐标
Result1.Format(_T("%srn"),
_T("--------- 模型点坐标:")
);
strOut+=Result1;
for(int i=0;i<9;i++)
{
Result1.Format(_T("%f,%f,%frn"),P(i,0),P(i,1),P(i,2));
strOut+=Result1;
}
Result1.Format(_T("%srn"),
_T("---------------------------------------------------------------")
);
strOut+=Result1;
//绝对定向
Result1.Format(_T("%s%srn"),
_T("--------- 绝对定向"),
_T("参数: x y z l f w k ")
);
strOut+=Result1;
for(int i=0;i<7;i++)
{
Result1.Format(_T("%frn"),Obs_X(i,0));
strOut+=Result1;
}
Result1.Format(_T("%s%.9f%srn"),
_T("--------- 绝对定向精度:"),
a2,
_T("")
);
strOut+=Result1;
Result1.Format(_T("%s%d%srn"),
_T("--------- 迭代次数:"),
counter_02,
_T("")
);
strOut+=Result1;
Result1.Format(_T("%srn"),
_T("---------------------------------------------------------------")
);
strOut+=Result1;
Result1.Format(_T("%srn"),
_T("---------------------------------------------------------------")
);
strOut+=Result1;
//最终结果
Result1.Format(_T("%srn%srn"),
_T("--------- 全部元素:"),
_T("左片x 左片y 右片x 右片y X Y Z ")
);
strOut+=Result1;
for(int i=0;i<9;i++)
{
Result1.Format(_T("%.4ft%.4ft%.4ft%.4ft%.4ft%.4ft%.4ftrn"),GCP[i].dLx*1000,GCP[i].dLy*1000,GCP[i].dRx*1000,GCP[i].dRy*1000,GCP[i].X,GCP[i].Y,GCP[i].Z);
strOut+=Result1;
}
CStdioFile SF;
CString strLine;
setlocale(LC_ALL,"");
if(!SF.Open(_T("Result.txt"), CFile::modeCreate|CFile::modeWrite)) return;
strLine.Format(_T("%srn%srn"),
_T("---------摄影测量 相对定向--绝对定向 实验-------------------"),
_T("---------相对定向参数 f w k u v ")
);
SF.WriteString(strLine);
SF.WriteString(strOut);
SF.Close();
AfxMessageBox(_T("成功!已输入至“Result.txt”中"));
}
/***************************************************************************
* 名字:void CSupport::main() *
* *
* 描述:主函数 调用函数k.read()、Re_Orientation()、FinalResults()、out() *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建该函数 *** *
* 参数: 无 *
* 返回值:无 *
* *
* 注: *
/**************************************************************************/
void CSupport::main()
{
CSupport k;
k.Re_Orientation(k.read());
k.Models();
k.Ob_Orientation();
k.FinalResults();
k.out();
}
3.3.7文件:< RS_110_Z_OrientationOfRe_ObDlg.cpp > (仅摘取部分)
/***************************************************************************
* 文件名:<RS_110_Z_OrientationOfRe_ObDlg.cpp> *
* *
* 描述: Dialog对话框使用 *
* *
* 历史:**日期** **理由** **签名** *
* 2019年5月6日 创建 *** *
* *
* 外部过程: *
* *
/**************************************************************************/
//计算按钮
void CRS_110_Z_OrientationOfRe_ObDlg::OnBnClickedOk()
{
// TODO: 在此添加控件通知处理程序代码
//CDialogEx::OnOK();
CSupport k;
k.main();
}
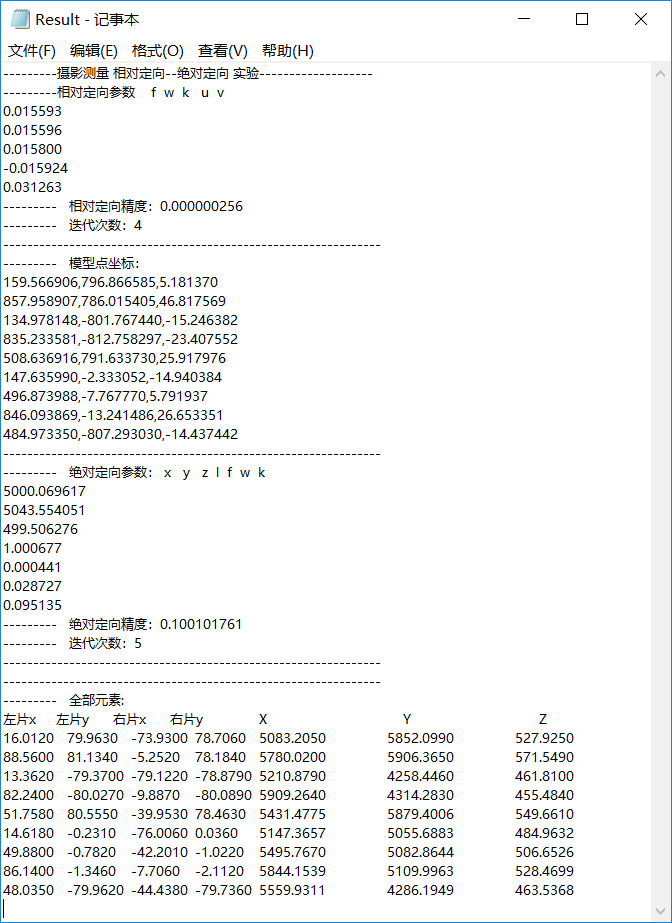
3.4运行结果
3.5 设计技巧
创建多个类,层次分明。调用了Cmatrix矩阵类,省了好多力气。
使用指针动态开辟数组,较为方便。
提前做好函数模块,结构化,有助于专注于编程。
采取.txt输入输出数据
代码虽多不要贪杯~
最后
以上就是勤奋短靴最近收集整理的关于相对定向绝对定向 MFC 实现 CSU摄影测量学相对定向绝对定向 MFC 实现 CSU摄影测量学摄影测量学基础的全部内容,更多相关相对定向绝对定向内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复