matlab实现pnp问题,实现后方交会
- 一、原理流程
- 0、BLH2XYZ
- 1、求解 P
- 1.1、坐标归一化 T
- 1.2、 系数矩阵A 定义
- 1.3 DLT 求解初值P0'
- 1.4 迭代优化
- 1.5 解除归一化,求得P
- 2、求解C = -M^(-1)P_4
- 3、 M --QR分解得到 R&K
- 4、R(相机-世界坐标) 到RC,并求姿态(难点!!!)
- 5、利用单像求解像点对应三维点(增加辅助约束:DEM/DSM)
- 二、代码
- 1、主程序
- 2、函数function .m文件
- 2.1、normalize.m
- 2.2、normalize_2d.m
- 2.3、normalize_3d.m
- 2.4、get_plane.m
- 2.5、geometric_error.m
一、原理流程
0、BLH2XYZ
经纬度坐标转换空间之间坐标
1、求解 P
1.1、坐标归一化 T
质心为原点,到原点距离的均值为sqrt(2)
fsolve函数:用此函数解算满足要求的T矩阵的各非零元素,函数fsolve中的function参数采用.m文件来定义
1.2、 系数矩阵A 定义
由xi,Xi的数值构成
1.3 DLT 求解初值P0’
A矩阵SVD分解后,右奇异矩阵最小特征值对应的特征向量,为AP=0 的线性解,以此作为P的初值P0
1.4 迭代优化
算法-levenberg marquardt 最小化几何(投影)误差,优化P
lsqnonlin:采用该函数实现迭代优化,函数lsqnonlin中的function参数采用.m文件来定义
1.5 解除归一化,求得P
2、求解C = -M^(-1)P_4
M是P 3x3的子矩阵
3、 M --QR分解得到 R&K
针对分解得到的R&K,结合射影的实际空间情形,进行简单变换,参考链接
make diagonal of K positive:
T = diag(sign(diag(K)));
K = K * T;
R = T * R; % (T is its own inverse)
如果图像y轴和摄像机y轴指向相反方向,将K第二列以及R的第二行取反:
K = K.*[1,-1,1;1,-1,1;1,-1,1];
R = R.* [1,1,1;-1,-1,-1;1,1,1];
4、R(相机-世界坐标) 到RC,并求姿态(难点!!!)
(相机姿态变换,世界坐标-相机坐标系 R_c)R = R_cT(参考链接)
矩阵的分解针对于R_c
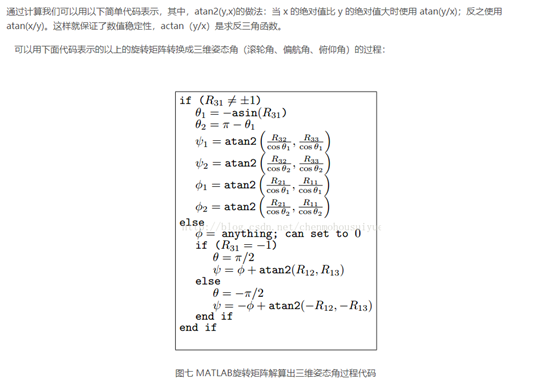
旋转矩阵的分解:
坐标系1-坐标系2的旋转矩阵为R12,则针对R12的以X轴为主轴的分解得到的角度为坐标系2相对于坐标系1的3个姿态角(轮转角、偏航角、俯仰角)
参考链接
5、利用单像求解像点对应三维点(增加辅助约束:DEM/DSM)
平面拟合:采用fsolve函数,解算平面参数,function参数设置同上
采用xi = P *Xi 以及约束条件 S(Xi) =0 求解Xi: 采用inv处理求解由约束条件构造的系数阵,进而求得Xi的解
二、代码
1、主程序
point_count = 6;
m = [xx,xx,xx,xx,xx,xx];% x坐标矩阵
n = [xx,xx,xx,xx,xx,xx];% y坐标矩阵
M = [xx,xx,xx,xx,xx,xx];% X坐标矩阵
N = [xx,xx,xx,xx,xx,xx];% Y坐标矩阵
V = [xx,xx,xx,xx,xx,xx];%Z 坐标矩阵
% %0 坐标转换BLH 2 XYZ
%
% lat = [xx,xx,xx,xx,xx,xx];%
% lon = [xx,xx,xx,xx,xx,xx];%
% H1 = [xx,xx,xx,xx,xx,xx];%Z 坐标矩阵
% f = 1 / 298.257223563;
% a= 6378137;
% b = a * (1 - f);
% e = sqrt(a * a - b * b) / a;
%
% for i = 1:point_count
% N(i) = a / sqrt(1 - e * e * sin(lat(i) * pi / 180) * sin(lat(i) * pi/ 180));
% WGS84_X(i) = (N(i) + H1(i)) * cos(lat(i) * pi / 180) * cos(lon(i) * pi / 180);
% WGS84_Y(i) = (N(i) + H1(i)) * cos(lat(i) * pi / 180) * sin(lon(i) * pi / 180);
% WGS84_Z(i) = (N(i)* (1 - (e * e)) + H1(i)) * sin(lat(i) * pi / 180);
%
% end
% M = WGS84_X% X坐标矩阵
% N = WGS84_Y% Y坐标矩阵
% V = WGS84_Z%Z 坐标矩阵
% 1、求解 P
%1.1坐标归一化 T:质心为原点,到原点距离的均值为sqrt(2)
%2d
T_2d = normalize([m;n])
mn = T_2d * [m;n;ones(1,point_count)];
m = mn(1,:);
n = mn(2,:);
%3d
T_3d = normalize([M;N;V])
MNV = T_3d*[M;N;V;ones(1,point_count)];
M = MNV(1,:);
N = MNV(2,:);
V = MNV(3,:);
% 1.2 系数矩阵A 定义
A = [];
for i = 1:point_count
A = [A;[0,0,0,0,-M(i),-N(i),-V(i),-1,n(i)*M(i),n(i)*N(i),n(i)*V(i),n(i);
M(i),N(i),V(i),1,0,0,0,0,-m(i)*M(i),-m(i)*N(i),-m(i)*V(i),-m(i)]];
end
%1.3 DLT 求解初值P0'
[U,S,V]=svd(A);
P0 = V(:,end);
% size(P0)
sv = P0.* P0; %the vector with elements
% as square of v's elements
dp = sum(sv); % sum of squares -- the dot product
mag = sqrt(dp) % magnitude
% aa = norm(P0)
%1.4 迭代算法-levenberg marquardt 最小化几何误差
% options = optimoptions(@lsqnonlin,'Algorithm','Levenberg-Marquardt','Display','iter');
options = optimoptions(@lsqnonlin,'Algorithm','Levenberg-Marquardt');
[x,resnorm,residual,exitflag,output] = lsqnonlin(@geometric_error,P0,[],[],options);
output;
P= reshape(x,3,4);
% norm(P)
sv = x.* x; %the vector with elements
% as square of v's elements
dp = sum(sv); % sum of squares -- the dot product
mag = sqrt(dp); % magnitude
%1.5 解除归一化,求得P
P = inv(T_2d)*P*T_3d;
% 2、求解C = -M^(-1)P4
M= P(:,1:3);
p4 = P(:,end);
C = -inv(M)*p4
%3、 M QR分解得到 R&K
[Q,R]=qr(M);
K = Q;
%make diagonal of K positive
T = diag(sign(diag(K)));
K = K * T;
R = T * R; % (T is its own inverse)
%如果图像y轴和摄像机y轴指向相反方向,将K第二列以及R的第二行取反
K = K.*[1,-1,1;1,-1,1;1,-1,1];
R = R.* [1,1,1;-1,-1,-1;1,1,1];
% 4、R(相机-世界坐标) 到RC(相机姿态变换,世界坐标-相机坐标系)R = RCT
Rc = R';
% 分解Rc,以Z 为主轴的转角系统
theta_z = atan2(Rc(2,1),Rc(1,1))/pi*180
theta_y = atan2(-Rc(3,1),sqrt(Rc(1,1).^2+Rc(2,1).^2))/pi*180
theta_x = atan2(Rc(3,2),Rc(3,3))/pi*180
% 5、求解成像最远点
% 5.1 求解四角点三维坐标
%5.1.1 平面拟合
plane0 = [1,1,1];
options = optimoptions('fsolve','Display','none','Algorithm','Levenberg-Marquardt');
plane = fsolve(@get_plane,plane0,options);
height = 1080;
width = 1920;
corner_point_2d = [0,0,1;0,height,1;width,0,1;width,height,1]';
corner_point_3d = inv([P;[plane,1]])*[corner_point_2d;zeros(1,4)];
corner_point_3d = corner_point_3d /diag(corner_point_3d(end,:));
corner_point_3d = corner_point_3d(1:3,:)%转为非齐次坐标
vector_3d = corner_point_3d-C;
for i = 1:4
distance(i) = norm(vector_3d(1:2,i));
end
distance_max = max( distance)
2、函数function .m文件
2.1、normalize.m
function T = normalize(cors)
[height,width] = size(cors);
x0 = [1,zeros(1,height)];
% options = optimoptions('fsolve','Display','none','PlotFcn',@optimplotfirstorderopt);
options = optimoptions('fsolve','Display','none');
if (height ==2)
t = fsolve(@normalize_2d,x0,options);% T矩阵的三个参数
else
t = fsolve(@normalize_3d,x0,options);% T矩阵的三个参数
end
T = [[diag(t(1)*ones(1,height));zeros(1,height)],[t(:,2:end)';1]];
2.2、normalize_2d.m
function F = normalize_2d(x)
point_count = 6;
m = [292,671,1444,1500,1265,902];% x坐标矩阵
n = [748,606,404,275,506,599];% y坐标矩阵
sum_m = sum(m);
sum_n = sum(n);
eqn_dis =0;
for i = 1:point_count
eqn_dis = eqn_dis + sqrt((x(1)*m(i)+x(2)).^2+(x(1)*n(i)+x(3)).^2);
end
F(1) = sum_m*x(1)+point_count*x(2);
F(2) = sum_n*x(1)+point_count*x(3);
F(3) = eqn_dis-sqrt(2)*point_count;
2.3、normalize_3d.m
function F = normalize_3d(x)
point_count = 6;
M = [xx,xx,xx,xx,xx,xx];% X坐标矩阵
N = [xx,xx,xx,xx,xx,xx];% Y坐标矩阵
V = [xx,xx,xx,xx,xx,xx];%Z 坐标矩阵
sum_M = sum(M);
sum_N = sum(N);
sum_V = sum(V);
eqn_dis =0;
for i = 1:point_count
eqn_dis = eqn_dis + sqrt((x(1)*M(i)+x(2)).^2+(x(1)*N(i)+x(3)).^2+(x(1)*V(i)+x(4)).^2);
end
F(1) = sum_M*x(1)+point_count*x(2);
F(2) = sum_N*x(1)+point_count*x(3);
F(3) = sum_V*x(1)+point_count*x(4);
F(4) = eqn_dis-sqrt(2)*point_count;
2.4、get_plane.m
function F = get_plane(x)
M = [xx,xx,xx,xx,xx,xx];% X坐标矩阵
N = [xx,xx,xx,xx,xx,xx];% Y坐标矩阵
V = [xx,xx,xx,xx,xx,xx];%Z 坐标矩阵
for i = 1 : 6
F(i) = x(1)* M(i)+x(2)*N(i)+ x(3)* V(i)+1;
end
2.5、geometric_error.m
function F = geometric_error(P)
m = [xx,xx,xx,xx,xx,xx];% x坐标矩阵
n = [xx,xx,xx,xx,xx,xx];% y坐标矩阵
M = [xx,xx,xx,xx,xx,xx];% X坐标矩阵
N = [xx,xx,xx,xx,xx,xx];% Y坐标矩阵
V = [xx,xx,xx,xx,xx,xx];%Z 坐标矩阵
%坐标归一化
%2d
x0 = [1,0,0];
% options = optimset('Display','iter','TolFun','1e-8');
% options = optimoptions('fsolve','Display','none','PlotFcn',@optimplotfirstorderopt);
fun = @normalize_2d;
x_result= fsolve(fun,x0);% T矩阵的三个参数
T_2d = [x_result(1),0,x_result(2);0,x_result(1),x_result(3);0,0,1];
m = m*x_result(1)+x_result(2);
n = n*x_result(1)+x_result(3);
%3d
xx_0 = [1,0,0,0];
fun_3d = @normalize_3d;
xx_result= fsolve(fun_3d,xx_0);% T矩阵的三个参数
T_3d = [xx_result(1),0,0,xx_result(2);0,xx_result(1),0,xx_result(3);0,0,xx_result(1),xx_result(4);0,0,0,1];
%归一化
M = M *xx_result(1)+xx_result(2);
N = N *xx_result(1)+ xx_result(3);
V = V*xx_result(1)+ xx_result(4);
F = 0;
point_count = 6;
for i = 1:point_count
x = [m(i),n(i),1]';
X = [M(i),N(i),V(i),1]';
P = reshape(P,3,4);
F = F + norm(x-P*X).^2;
end
最后
以上就是飞快外套最近收集整理的关于matlab解决pnp问题,实现后方交会一、原理流程二、代码的全部内容,更多相关matlab解决pnp问题内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复