视觉SLAM笔记(21) 双目相机模型
- 1. 深度确定
- 2. 景物差异
- 3. 成像原理
- 4. 计算困难
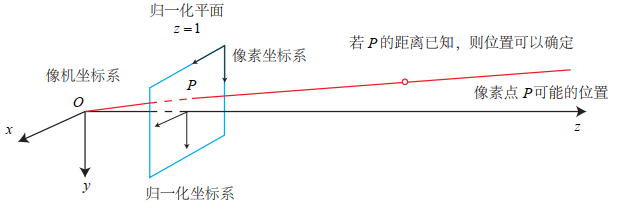
1. 深度确定
针孔相机模型描述了单个相机的成像模型
然而,仅根据一个像素,是无法确定这个空间点的具体位置的
这是因为,从相机光心到归一化平面连线上的所有点,都可以投影至该像素上
只有当 P 的深度确定时(比如通过双目或 RGB-D 相机),才能确切地知道它的空间位置
2. 景物差异
测量像素距离(或深度)的方式有很多种
像人眼就可以根据左右眼看到的景物差异(或称视差)来判断物体与我们的距离
双目相机的原理亦是如此
通过同步采集左右相机的图像,计算图像间视差,来估计每一个像素的深度
3. 成
最后
以上就是踏实翅膀最近收集整理的关于视觉SLAM笔记(21) 双目相机模型1. 深度确定2. 景物差异3. 成像原理的全部内容,更多相关视觉SLAM笔记(21)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复