1.基于Matlab/Simulink的快速控制原型(RCP)仿真系统介绍
Matlab/Simulink是一个强大的数学建模仿真和计算工具。该工具已经覆盖了几乎所有的学科领域。在机电一体化、航空航天、雷达、机械工程、图像处理等众多领域得到了十分广泛的应用。在传统的机电产品的专用控制器开发过程中,用户往往需要从前期制作硬件电路开始,硬件电路开发完成后,还需要移植操作系统并开发硬件的底层驱动。在这个基础上,才正式开发控制算法。在产品开发过程中,一旦出现问题,硬件、底层驱动、控制代码和控制策略本身等各种因素都有可能会引起故障。所有这些问题缠绕在一起,使得用户难以快速定位问题所在。此外,在控制策略开发过程中,控制策略本身的一些参数也往往需要反复修改。而传统的开发过程中,用户每修改一次控制参数,就需要将代码重新编译和下载一次。
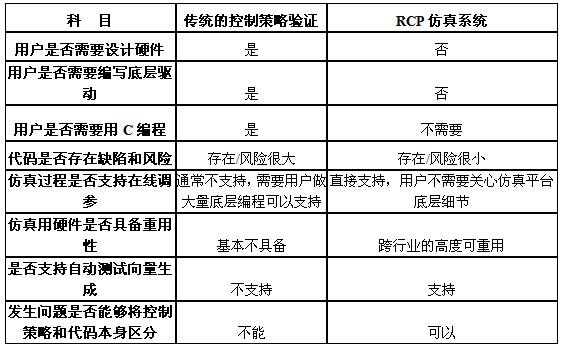
所谓的基于Matlab/Simulink的快速控制原型(RCP)仿真系统是一种开发控制策略的有效方法。在控制策略开发过程中,用户先在Matlab/Simulink提供的软件环境里进行建模和仿真。然后利用Matlab/Simulink提供的自动代码生成的功能,将控制策略模型自动生成标准C代码经过编译下载到一个标准的嵌入式硬件平台加以执行。而这个标准硬件平台与真实的受控对象连接。代码下载到控制器上后,可以驱动真实的受控对象工作,从而在真实环境下验证控制策略。在算法的验证过程中,通过网络,上位机还可以实时修改控制策略的参数,实现在线调参。用户无须一次次修改控制参数,然后编译下载和调试。由此可见基于Matlab/Simulink的快速控制原型仿真系统在开发控制器的过程中,用户不需要自己开发硬件,不需要编写硬件驱动,不需要关心C代码本身的缺陷,可以在线调参,用户能够将注意力集中在控制策略本身,从而有效克服了传统控制器开发方式的缺陷,加快了产品开发进度。以下是两种开发方式的对比
2.系统组成
3.成功案例 在绣花机控制策略开发中的应用
电脑绣花机控制策略的顶层模块:
电脑绣花机控制策略的中间模块
电脑绣花机控制策略的底层数学模型
本仿真系统与绣花机连接仿真

在线调参界面
最后
以上就是传统导师最近收集整理的关于基于matlab的控制虚拟实验室,基于Matlab/Simulink的快速控制原型(RCP)仿真系统的全部内容,更多相关基于matlab内容请搜索靠谱客的其他文章。








发表评论 取消回复