电驱动四足机器人模型,包括步态分析和设计流程。
Quadruped robot model with electrical actuation, including gait analysis and design workflow.
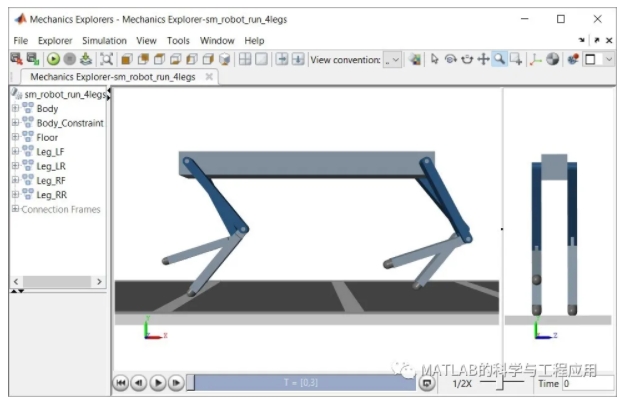
建模一个电动四足机器人。
Models a quadruped robot with electrical actuation.
机器人以四条腿小跑的步态奔跑。
The robot runs with trotting gait on four legs.
支持的模型解释并自动化四肢、关节角轨迹和电气系统的设计过程。
Supporting models explain and automate the design process for the limbs, joint angle trajectories, and electrical system.
这个模型类似于以下视频中看到的四足机器人,https://www.youtube.com/watch?v=M8YjvHYbZ9w
This model is similar to quadruped robots such as those seen in the video, “Introducing Spot“ https://www.youtube.com/watch?v=M8YjvHYbZ9w
请从阅读README.txt文件开始。
Please read the README.txt file to get started.
更多精彩文章请关注公众号:
最后
以上就是超级书本最近收集整理的关于【源码】Simscape中的跑步机器人模型的全部内容,更多相关【源码】Simscape中内容请搜索靠谱客的其他文章。








发表评论 取消回复