概要
本文是对深度强化学习中的DDPG(Deep Deterministic Policy Gradient)算法相关原理和代码实现的介绍。
有任何不足之处,望指正!
DDPG算法原理(Deep Deterministic Policy Gradient)
DDPG算法是基于DPG算法所提出的,属于无模型中的actor-critic方法中的off-policy算法(因为动作不是直接在交互的过程中更新的),之后学者又在此基础上提出了适合于多智能体环境的MADDPG (Multi Agent DDPG)算法。
可以说DDPG是在DQN算法的基础之上进行改进的,DQN存在的问题就在于它只能解决含有离散和低维度的动作空间的问题。而一般的物理问题或控制问题中,动作空间是连续的,比如控制一个倒立摆问题(gym里对应的是"Pendulum-v0")。学者在借鉴DQN算法之后提出了DDPG算法,该算法的元素有以下几个:
- actor和critic这两个部分分别由训练的网络和目标网络构成,相当于是总共含有4个网络。
- 与DQN中一样,DDPG中也引入了experience buffer的机制,用于存储agent与环境交互的数据( ( s t , a t , r t , s t + 1 ) (s_{t},a_{t},r_{t}, s_{t+1}) (st,at,rt,st+1))
- 与DQN目标网络之间延迟复制现有网络不同的是,DDPG中采用soft update, 也就是缓慢地更新两个目标网络中的参数
- 在神经网络中加入batch normalization的技巧(以上几点说明了算法模型如何学习的过程,除此之外,在强化学习中,还必须要包括智能体如何进行探索的方法)
- DDPG算法采用向动作网络的输出中添加随机噪声的方式实现exploration。
下图是DDPG的伪代码示意:
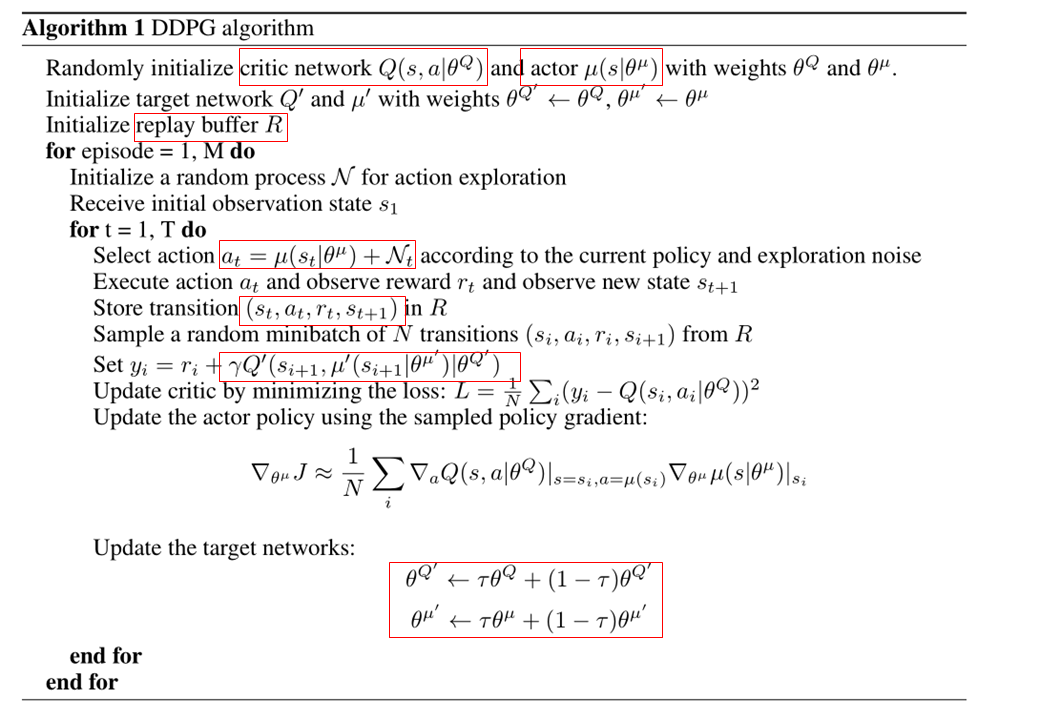
首先是定义actor和critic的这两个网络结构并初始化网络中的参数(网络模型均一致),之后定义经验池的存放和采样过程(ER buffer),最后是将完整的DDPG算法过程放到一个大的类中(面向对象的定义方法比较方便)。在伪代码中最需要关注的就是这两种网络分别是怎么更新参数的。对于actor网络来说,它的更新方法是基于梯度上升的。该网络的损失函数就是从critic网络中获取的Q值的平均值,在实现的过程中,需要加入负号,即最小化损失函数,来与深度学习框架保持一致。用数学公式表示其损失函数就是:
J
(
θ
μ
)
=
E
[
Q
(
s
,
a
∣
θ
Q
)
∣
s
=
s
t
,
a
=
μ
(
s
t
∣
θ
μ
)
]
J(theta^{mu})= mathbb{E}[Q(s,a|theta^{Q})|_{s=s_t, a=mu(s_t|theta^{mu})}]
J(θμ)=E[Q(s,a∣θQ)∣s=st,a=μ(st∣θμ)]
在实际编程的过程中也是用的该损失函数,而不是之间将伪代码中的该函数的梯度进行实现。
而critic网络的参数更新方式是与DQN算法一样的,就是通过最小化目标网络与现有网络之间的均方误差来更新现有网络的参数,只不过唯一不同的地方在于目标网络的参数在DDPG算法中是缓慢更新的,而不是在DQN中每隔N步将现有网络的参数直接复制过来。
DDPG算法实现
本节对DDPG的算法进行实现,简化了一下此repo中的DDPG代码。此代码是用gym环境中的倒立摆环境,让agent学会如何让摆静止在倒挂的状态。该程序中我已经加入了必要的注释,目前训练结果不是很好,还需要继续调参和调试。
存在问题的地方:
应该先将智能体与环境交互的数据存储到储存器,且等到储存器的数据量被填充完之后再进行训练,第一个版本的代码我认为问题就在这,所以导致训练结果非常差。最新的代码参考了这篇文章,如下:
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import gym
import time
##################### hyper parameters ####################
EPISODES = 200
EP_STEPS = 200
LR_ACTOR = 0.001
LR_CRITIC = 0.002
GAMMA = 0.9
TAU = 0.01
MEMORY_CAPACITY = 10000
BATCH_SIZE = 32
RENDER = False
ENV_NAME = 'Pendulum-v0'
########################## DDPG Framework ######################
class ActorNet(nn.Module): # define the network structure for actor and critic
def __init__(self, s_dim, a_dim):
super(ActorNet, self).__init__()
self.fc1 = nn.Linear(s_dim, 30)
self.fc1.weight.data.normal_(0, 0.1) # initialization of FC1
self.out = nn.Linear(30, a_dim)
self.out.weight.data.normal_(0, 0.1) # initilizaiton of OUT
def forward(self, x):
x = self.fc1(x)
x = F.relu(x)
x = self.out(x)
x = torch.tanh(x)
actions = x * 2 # for the game "Pendulum-v0", action range is [-2, 2]
return actions
class CriticNet(nn.Module):
def __init__(self, s_dim, a_dim):
super(CriticNet, self).__init__()
self.fcs = nn.Linear(s_dim, 30)
self.fcs.weight.data.normal_(0, 0.1)
self.fca = nn.Linear(a_dim, 30)
self.fca.weight.data.normal_(0, 0.1)
self.out = nn.Linear(30, 1)
self.out.weight.data.normal_(0, 0.1)
def forward(self, s, a):
x = self.fcs(s)
y = self.fca(a)
actions_value = self.out(F.relu(x+y))
return actions_value
class DDPG(object):
def __init__(self, a_dim, s_dim, a_bound):
self.a_dim, self.s_dim, self.a_bound = a_dim, s_dim, a_bound
self.memory = np.zeros((MEMORY_CAPACITY, s_dim * 2 + a_dim + 1), dtype=np.float32)
self.pointer = 0 # serves as updating the memory data
# Create the 4 network objects
self.actor_eval = ActorNet(s_dim, a_dim)
self.actor_target = ActorNet(s_dim, a_dim)
self.critic_eval = CriticNet(s_dim, a_dim)
self.critic_target = CriticNet(s_dim, a_dim)
# create 2 optimizers for actor and critic
self.actor_optimizer = torch.optim.Adam(self.actor_eval.parameters(), lr=LR_ACTOR)
self.critic_optimizer = torch.optim.Adam(self.critic_eval.parameters(), lr=LR_CRITIC)
# Define the loss function for critic network update
self.loss_func = nn.MSELoss()
def store_transition(self, s, a, r, s_): # how to store the episodic data to buffer
transition = np.hstack((s, a, [r], s_))
index = self.pointer % MEMORY_CAPACITY # replace the old data with new data
self.memory[index, :] = transition
self.pointer += 1
def choose_action(self, s):
# print(s)
s = torch.unsqueeze(torch.FloatTensor(s), 0)
return self.actor_eval(s)[0].detach()
def learn(self):
# softly update the target networks
for x in self.actor_target.state_dict().keys():
eval('self.actor_target.' + x + '.data.mul_((1-TAU))')
eval('self.actor_target.' + x + '.data.add_(TAU*self.actor_eval.' + x + '.data)')
for x in self.critic_target.state_dict().keys():
eval('self.critic_target.' + x + '.data.mul_((1-TAU))')
eval('self.critic_target.' + x + '.data.add_(TAU*self.critic_eval.' + x + '.data)')
# sample from buffer a mini-batch data
indices = np.random.choice(MEMORY_CAPACITY, size=BATCH_SIZE)
batch_trans = self.memory[indices, :]
# extract data from mini-batch of transitions including s, a, r, s_
batch_s = torch.FloatTensor(batch_trans[:, :self.s_dim])
batch_a = torch.FloatTensor(batch_trans[:, self.s_dim:self.s_dim + self.a_dim])
batch_r = torch.FloatTensor(batch_trans[:, -self.s_dim - 1: -self.s_dim])
batch_s_ = torch.FloatTensor(batch_trans[:, -self.s_dim:])
# make action and evaluate its action values
a = self.actor_eval(batch_s)
q = self.critic_eval(batch_s, a)
actor_loss = -torch.mean(q)
# optimize the loss of actor network
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()
# compute the target Q value using the information of next state
a_target = self.actor_target(batch_s_)
q_tmp = self.critic_target(batch_s_, a_target)
q_target = batch_r + GAMMA * q_tmp
# compute the current q value and the loss
q_eval = self.critic_eval(batch_s, batch_a)
td_error = self.loss_func(q_target, q_eval)
# optimize the loss of critic network
self.critic_optimizer.zero_grad()
td_error.backward()
self.critic_optimizer.step()
############################### Training ######################################
# Define the env in gym
env = gym.make(ENV_NAME)
env = env.unwrapped
env.seed(1)
s_dim = env.observation_space.shape[0]
a_dim = env.action_space.shape[0]
a_bound = env.action_space.high
a_low_bound = env.action_space.low
ddpg = DDPG(a_dim, s_dim, a_bound)
var = 3 # the controller of exploration which will decay during training process
t1 = time.time()
for i in range(EPISODES):
s = env.reset()
ep_r = 0
for j in range(EP_STEPS):
if RENDER: env.render()
# add explorative noise to action
a = ddpg.choose_action(s)
a = np.clip(np.random.normal(a, var), a_low_bound, a_bound)
s_, r, done, info = env.step(a)
ddpg.store_transition(s, a, r / 10, s_) # store the transition to memory
if ddpg.pointer > MEMORY_CAPACITY:
var *= 0.9995 # decay the exploration controller factor
ddpg.learn()
s = s_
ep_r += r
if j == EP_STEPS - 1:
print('Episode: ', i, ' Reward: %i' % (ep_r), 'Explore: %.2f' % var)
if ep_r > -300 : RENDER = True
break
print('Running time: ', time.time() - t1)
以下内容请跳过,这里只是记录一下训练结果不好的代码
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
# from tensorboardX import SummaryWriter
import gym
import numpy as np
import random
from torch.distributions import Normal
from itertools import count
# Define hyperparameters
ENV_NAME = "Pendulum-v0" # gym env
BATCH_SIZE = 100 # mini-batch size when sampled from buffer
MEM_CAPACTIY = 10000 # Replay buffer size
EPISODES = 200
STEPS = 200
GAMMA = 0.9 # discount factor
LEARNING_RATE = 1e-3 # learning rate of optimizer
TAU = 0.01 # update the target net parameter smoothly
RANDOM_SEED = 9527 # fix the random seed
# SAMPLE_FREQ = 2000
NOISE_VAR = 0.1
RENDER = False
device = 'cuda' if torch.cuda.is_available() else 'cpu' # use GPU to train
print(device)
env = gym.make(ENV_NAME)
ACTION_DIM = env.action_space.shape[0] #dim=1
STATE_DIM = env.observation_space.shape[0] # dim=3
ACTION_BOUND = env.action_space.high[0] # action interval [-2,2]
np.random.seed(RANDOM_SEED) # fix the random seed
directory = '.\exp\'
class ReplayBuffer():
def __init__(self, max_size=MEM_CAPACTIY):
self.storage = [] #empty list
self.max_size = max_size
self.pointer= 0
def store_transition(self, transition):
if len(self.storage) == self.max_size: # replace the old data
self.storage[self.pointer] = transition
self.pointer = (self.pointer + 1) % self.max_size # point to next position
else:
self.storage.append(transition)
def sample(self, batch_size):
# Define the array of indices for random sampling from storage
# the size of this array equals to batch_size
ind_array = np.random.randint(0, len(self.storage),size=batch_size)
s, a, r, s_, d = [], [], [], [], []
for i in ind_array:
S, A, R, S_, D = self.storage[i]
s.append(np.array(S, copy=False))
a.append(np.array(A, copy=False))
r.append(np.array(R, copy=False))
s_.append(np.array(S_, copy=False))
d.append(np.array(D, copy=False))
return np.array(s), np.array(a), np.array(r).reshape(-1, 1), np.array(s_), np.array(d).reshape(-1, 1)
class Actor(nn.Module):
def __init__(self, state_dim, action_dim, max_action):
super(Actor, self).__init__()
self.l1 = nn.Linear(state_dim, 30)
self.l1.weight.data.normal_(0, 0.3) # initialization
self.l2 = nn.Linear(30, action_dim)
self.l2.weight.data.normal_(0, 0.3) # initialization
self.max_action = max_action
def forward(self, x):
x = F.relu(self.l1(x))
x = self.max_action * torch.tanh(self.l2(x)) # the range of tanh is [-1, 1]
return x
class Critic(nn.Module):
def __init__(self, state_dim, action_dim):
super(Critic,self).__init__()
self.l1 = nn.Linear(state_dim + action_dim, 30)
self.l1.weight.data.normal_(0, 0.3) # initialization
self.l2 = nn.Linear(30, 1)
self.l2.weight.data.normal_(0, 0.3) # initialization
def forward(self, x, a):
x = F.relu(self.l1(torch.cat([x, a], 1)))
x = self.l2(x)
return x
class DDPG(object):
def __init__(self, state_dim, action_dim, max_action):
# network, optimizer for actor
self.actor = Actor(state_dim, action_dim, max_action).to(device)
self.actor_target = Actor(state_dim, action_dim, max_action).to(device)
self.actor_target.load_state_dict(self.actor.state_dict())
self.actor_optimizer = optim.Adam(self.actor.parameters(), lr=LEARNING_RATE)
# network, optimizer for critic
self.critic = Critic(state_dim, action_dim).to(device)
self.critic_target = Critic(state_dim, action_dim).to(device)
self.critic_target.load_state_dict(self.critic.state_dict())
self.critic_optimizer = optim.Adam(self.critic.parameters(), lr=LEARNING_RATE)
# create replay buffer object
self.replay_buffer = ReplayBuffer()
def select_action(self, state):
# select action based on actor network and add some noise on it for exploration
state = torch.FloatTensor(state.reshape(1, -1)).to(device)
action = self.actor(state).cpu().data.numpy().flatten()
noise = np.random.normal(0, NOISE_VAR, size=ACTION_DIM).clip(
env.action_space.low, env.action_space.high)
action = action + noise
return action
def update(self):
for i in range(EPISODES):
s, a, r, s_, d = self.replay_buffer.sample(BATCH_SIZE)
# transfer these tensors to GPU
state = torch.FloatTensor(s).to(device)
action = torch.FloatTensor(a).to(device)
reward = torch.FloatTensor(r).to(device)
next_state = torch.FloatTensor(s_).to(device)
done = torch.FloatTensor(d).to(device)
# compute the target Q value
target_Q = self.critic_target(next_state, self.actor_target(next_state))
target_Q = reward + (done * GAMMA * target_Q).detach()
# Get the current Q value
current_Q = self.critic(state, action)
# compute critic loss by MSE
critic_loss = F.mse_loss(current_Q, target_Q)
# use optimizer to update the critic network
self.critic_optimizer.zero_grad()
critic_loss.backward()
self.critic_optimizer.step()
# compute the actor loss and its gradient to update the parameters
actor_loss = -self.critic(state,self.actor(state)).mean()
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()
# update the target network of actor and critic
# zip() constructs tuple from iterable object
for param, target_param in zip(self.critic.parameters(), self.critic_target.parameters()):
target_param.data.copy_(TAU * param.data + (1-TAU) * target_param.data)
for param, target_param in zip(self.actor.parameters(), self.actor_target.parameters()):
target_param.data.copy_(TAU * param.data + (1-TAU) * target_param.data)
def save(self):
torch.save(self.actor.state_dict(), directory + 'actor.pth')
torch.save(self.critic.state_dict(), directory + 'critic.pth')
def load(self):
self.actor.load_state_dict(torch.load(directory + 'actor.pth'))
self.critic.load_state_dict(torch.load(directory + 'critic.pth'))
def main():
agent = DDPG(STATE_DIM, ACTION_DIM, ACTION_BOUND)
ep_r = 0
total_step = 0
for i in range(EPISODES):
total_reward = 0
step = 0
state = env.reset()
for t in count():
if RENDER == True and i > 100: env.render() # Render is unnecessary
action = agent.select_action(state)
# get the next transition by using current action
next_state, reward, done, info = env.step(action)
# store the transition to the buffer
agent.replay_buffer.store_transition((state, action, reward / 10, next_state, np.float(done)))
state = next_state
if done:
break
step += 1
total_reward += reward
total_step += step+1
print("Total T:{} Episode: t{} Total Reward: t{:0.2f}".format(total_step, i, total_reward))
agent.update()
#NOISE_VAR *= 0.99
env.close()
if __name__ == '__main__':
main()
最后
以上就是动听眼神最近收集整理的关于深度强化学习笔记——DDPG原理及实现(pytorch)概要DDPG算法原理(Deep Deterministic Policy Gradient)DDPG算法实现的全部内容,更多相关深度强化学习笔记——DDPG原理及实现(pytorch)概要DDPG算法原理(Deep内容请搜索靠谱客的其他文章。








发表评论 取消回复