声明:此文版权归我AZ所有,转贴请声明!!!求您了!!!
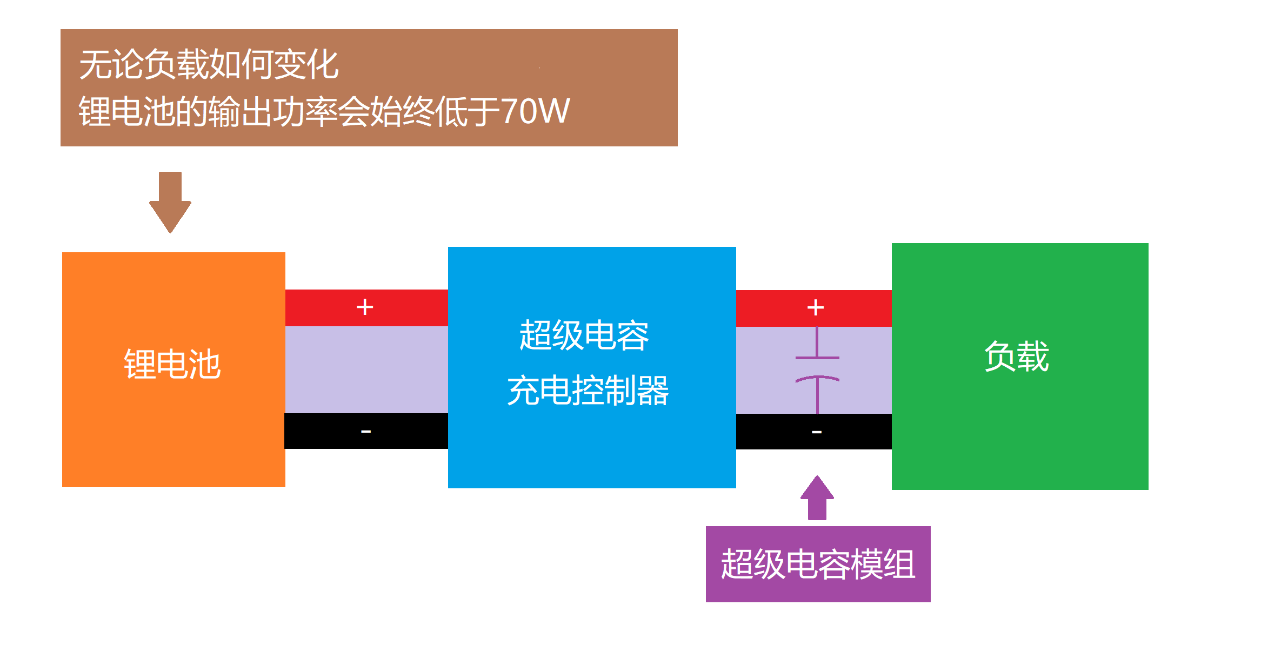
如上图所示,整个系统连接如上图,法拉电容直接接在负载两端,这里的负载仅针对3508、3510等电机(关于电压波动后面会说)。我们要做的是设计一个控制器,保证从锂电池输入到超级电容以及负载的功率为恒定的。这样,电机们在工作时候,如果功耗超过设定功率时候,电容和锂电池一起为底盘供电,即总功率 = 锂电池的80W + 法拉电容放出的功率。如果电机为轻载时候,小于设定功率时候,锂电池为底盘供电的同时,还可以为电容充电,考虑到正常的RM步兵车在平地高速跑时候功率仅40—50W左右,所以大部分时候功率都有富余。仅在爬坡、加速、减速时候会超功率。而且整个过程为自动完成。只要设置好电容容量就可以实现全程满血工作。
此方案电容相当于直接接在负载两端,也就是说,电机两端的电压在你超过设定功率时候是不恒定的。这种设计对于电机负载来说,比采用升压设计更有效。为什么呢?因为电机作为电流驱动型设备,大家使用的3508等电机的电调具备优秀的电流环设计,能抑制输入电压的缓慢变化带来的影响。而且电机在刹车等操作的时候,回馈的电流会直接冲回法拉电容组。而如果采用升压方案,首先系统整体的效率会下降,常规同步升压的效率理想情况下也仅仅90%上下,损耗非常大,而且电机刹车会造成升压输出端的泵升电压,如果处理不当,轻则击穿MOS,重则烧毁电调。只要注意不要超功率太久,就可以全程满血。
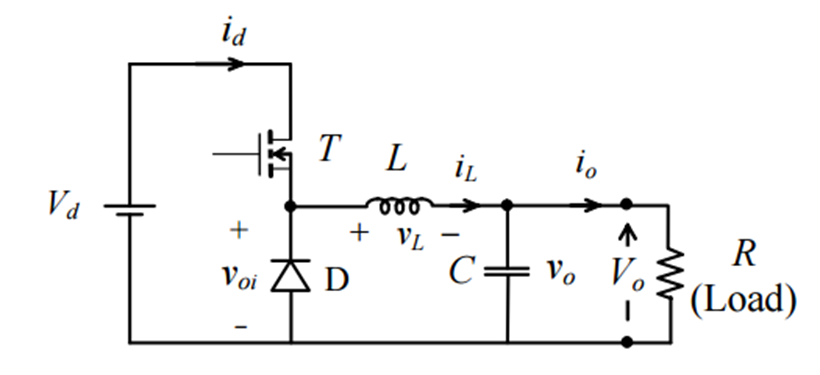
功率控制板如何实现呢?当然是功率闭环咯,采集输入的电流电压然后你懂的就得到了功率。然后经过一些控制算法控制某个电路就OK了。在这里我打算采用同步Buck来实现这一功能,经典的Buck结构如下图,为了简化电路的设计,还是同步Buck好,但是控制比较麻烦。这样,采集输入端的电流、电压得到功率,然后设计一个算法控制MOS管T的导通时间(PWM占空比)就OK,至于电感大小、PWM频率等一些参数,电力电子、电源啥的了解一下吧,至于控制算法呢,我这里采用的PID+前馈控制+滑模控制得到的一个杂交的控制算法,如果你不懂,纯粹的PID也能实现控制,只是功率为非线性的,控制起来有点飘飘然,不过瞎JB调参大法兴许有用。
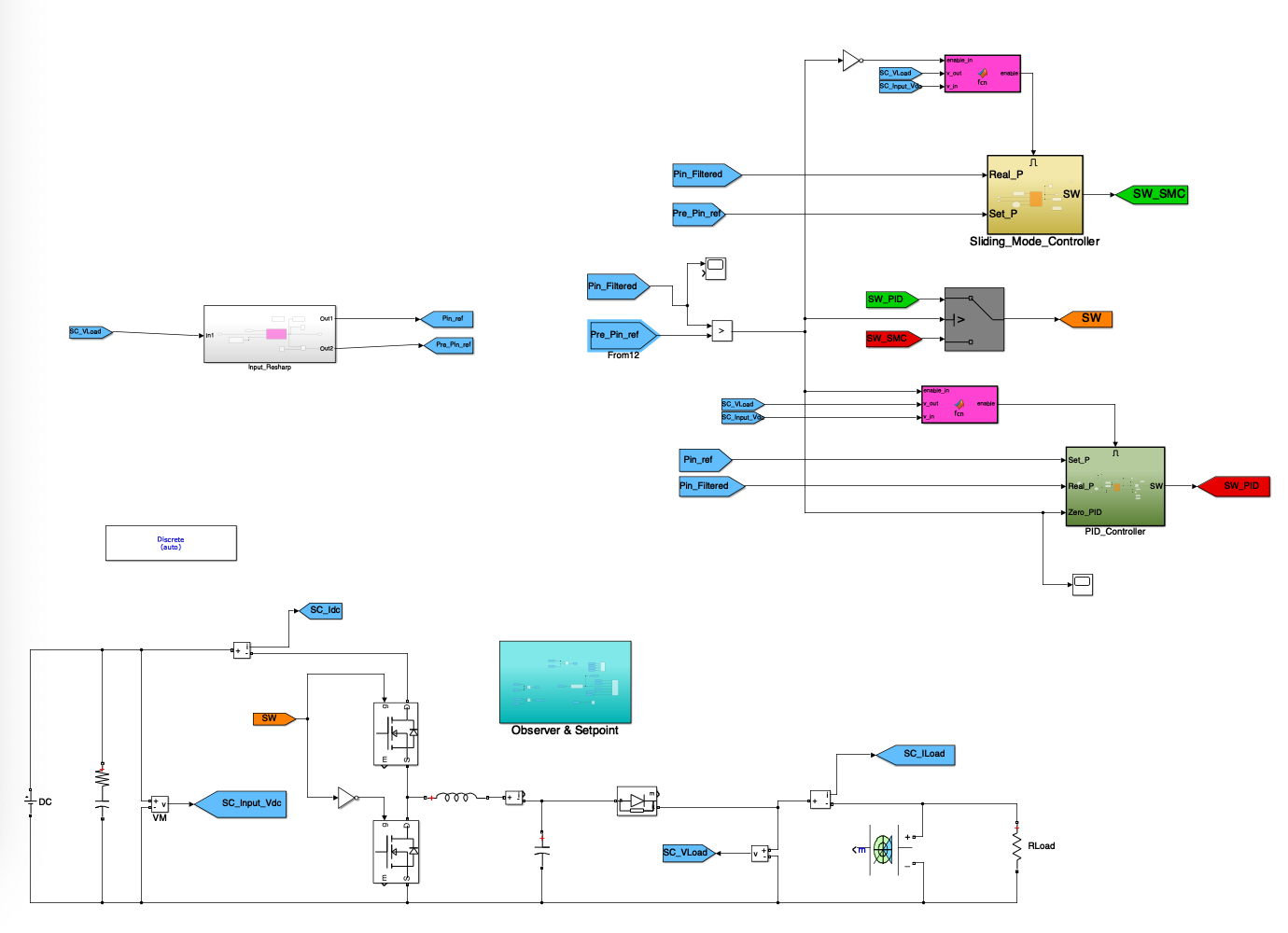
下面先仿真一下,感谢Matlab(手动滑稽)
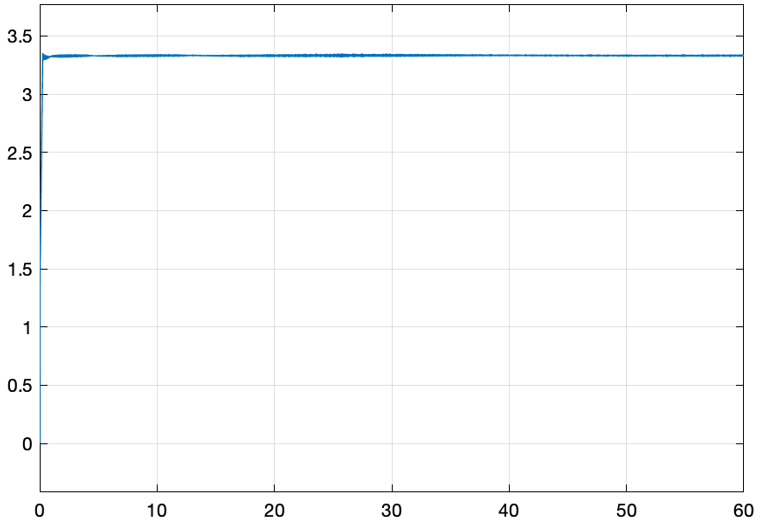
经过luck Number调参大法(俗称试凑法,滑稽)整个系统工作稳定。系统输入为24V,下面放点测试图。
80W恒功率模式下带5Ω负载的输入电流(y轴单位A, x轴单位s, Simulink仿真)
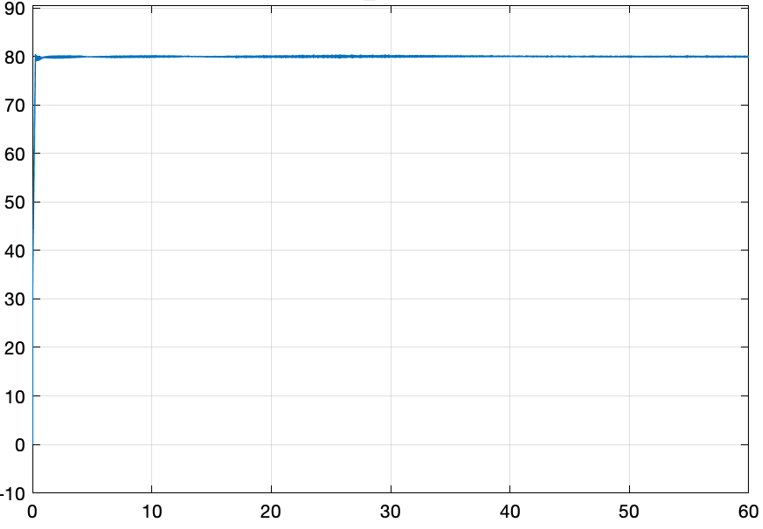
80W恒功率模式下带5Ω负载的输入功率(y轴单位W, x轴单位s, Simulink仿真)
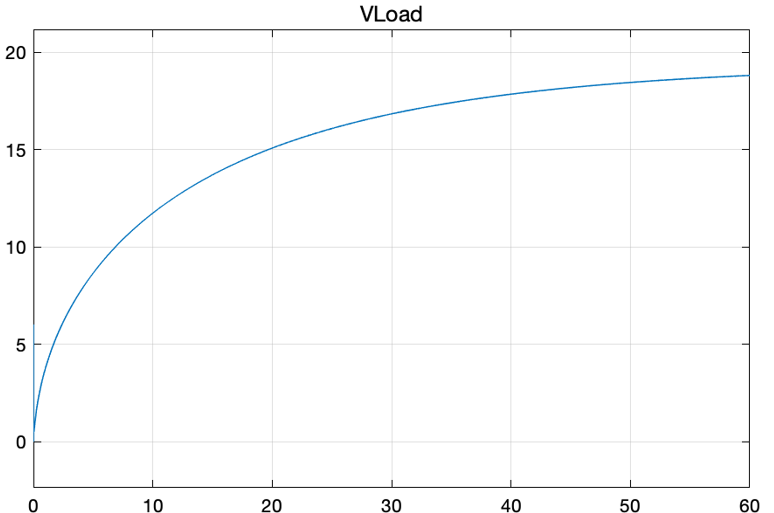
80W恒功率模式下带5Ω负载的充电电压(y轴单位V, x轴单位s, Simulink仿真)
当然咯,很多人说电机为动态变化的负载,测试过负载从1R快速变化到5R,反复如此,由于法拉电容强大的惯性,输入功率仅仅微微一硬,表示一下尊重。
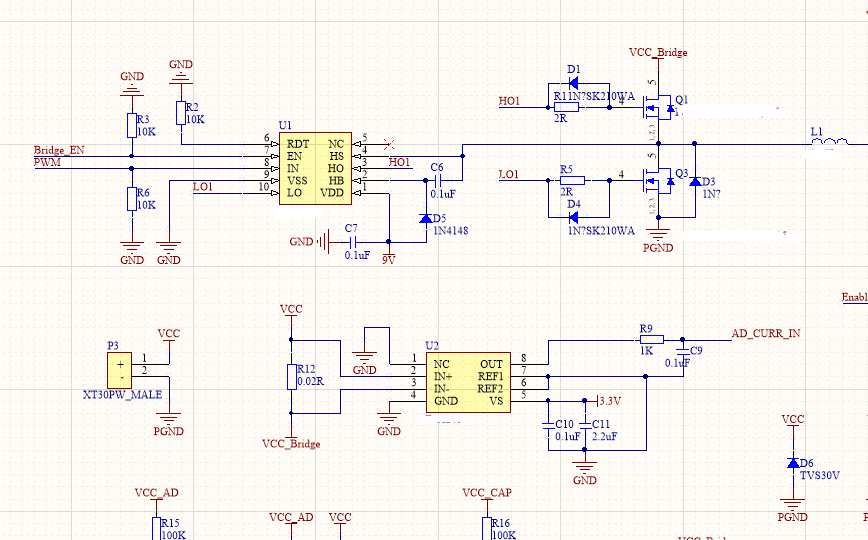
仿真验证了可行性,当然要电路搭起来实测咯,放一个测试的主电路,为了帮助大家快速的实现这一功能,特意隐藏了一些参数、型号。选型也是技能,搞不懂很多人动轴选个几百A的MOS。。。。
其他的电路各位自己思索,比如,输出如何关闭等,要符合大赛要求啊。
下面是开始30w恒功率充电,然后更改为70W的电容电压变化图,输入基本稳定的
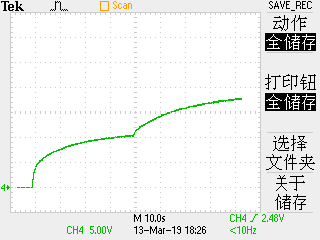
在充电过程中进行功率切换的实际测试波形(实测)
最后放个古老的充电视频https://www.bilibili.com/video/av44662234 祝大家好运。
最后透漏一个机密,采用100F/12的电容组,在一个接近满载的四麦轮底盘上,此方案爬坡、快跑全程灵活。
最后
以上就是昏睡大树最近收集整理的关于Robomaster 法拉电容恒功率 控制的一种方案的全部内容,更多相关Robomaster内容请搜索靠谱客的其他文章。








发表评论 取消回复