树莓派装ROS系统(第一篇)
注:
第一篇 主要是撰写了树莓派安装ROS系统,远程连接等操作。
在网上扒拉了一些资料,感觉各有优缺,作为踩坑者要进行信息的筛选,因此才想着写一篇博客作为记录,并作为提升的总结。
此篇文章仅用于学习记录使用!
文章目录
- 树莓派装ROS系统(第一篇)
- 一、 前期准备
- 二、具体操作
- 三、 系统安装
- 四、系统测试
- 总结
一、 前期准备
1、树莓派CM4
2、读卡器、TF卡(32G),网线(直插路由器)等
3、下面主要记录说明一下我的安装过程。
简介“树莓派装系统、环境的配置、功能测试、有待提升”
如有错误,欢迎指正。
二、具体操作
(1)首先是TF卡(如果是新卡就不需要格式化了,至少为16G)格式化,插入读卡器,在电脑上右击格式化。
(2)在磁盘管理中格式化TF卡,在windows系统左下角的搜索框里输入“创建并格式化硬盘分区”便可进入。
根据内存来判断那个是TF卡的磁盘,千万不要删错了电脑的磁盘分区!!!
右击TF卡的磁盘点击新建简单卷就完成了TF卡的操作
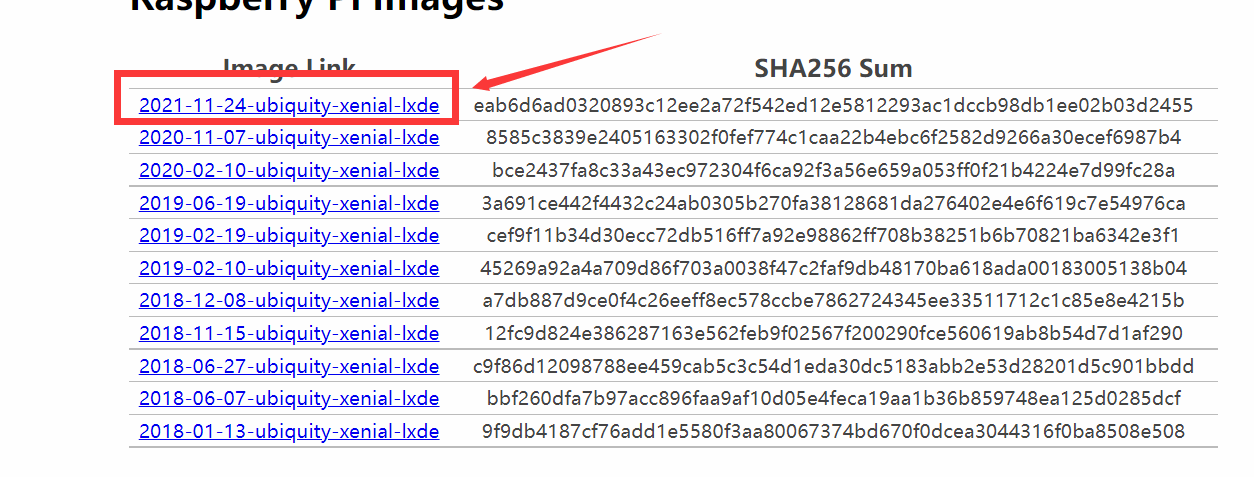
(3)下载树莓派的镜像文件
树莓派ROS镜像文件
当你看到很多英文是否很茫然,看下面的图示操作吧!
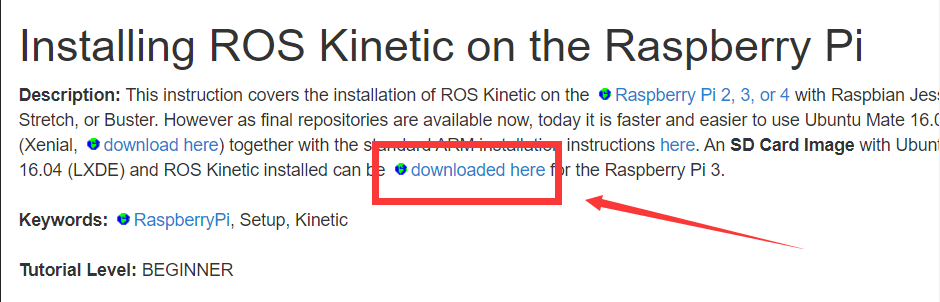
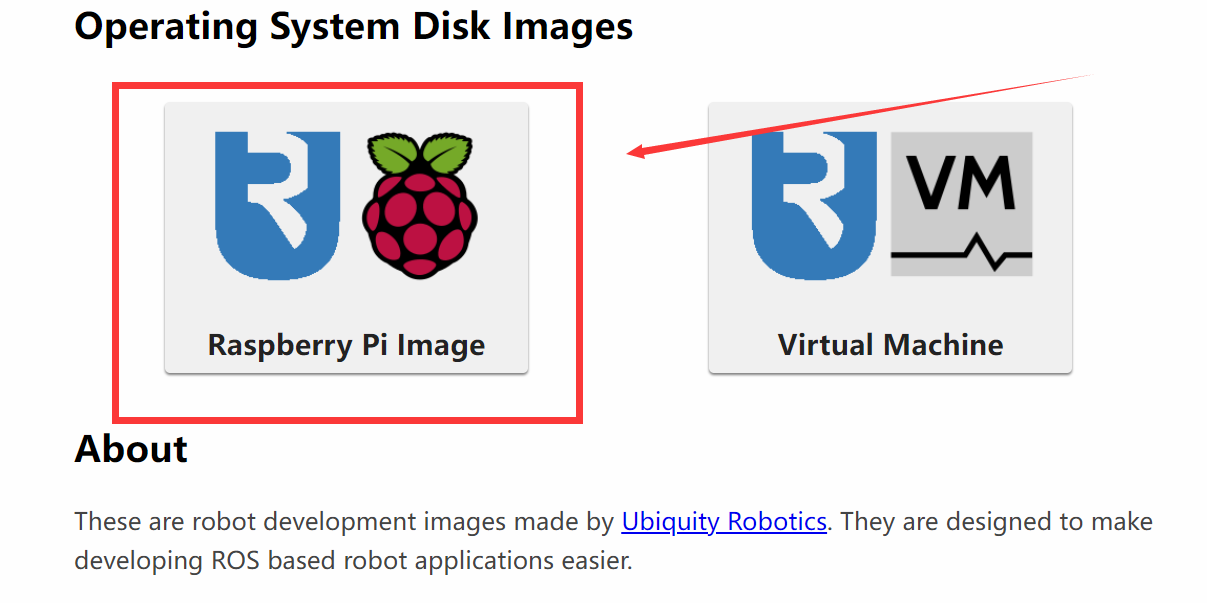
点击即可下载(下载速度还是挺快的),建议新建一个Raspberry_pi的文件夹用于存放相关文件。
(4)安装Raspberry Pi-kinect系统
主要是通过这个软件对TF进行烧录系统,还有其他的烧录放方法,我在此就不过多解释了。
Raspberry Pi Imager下载
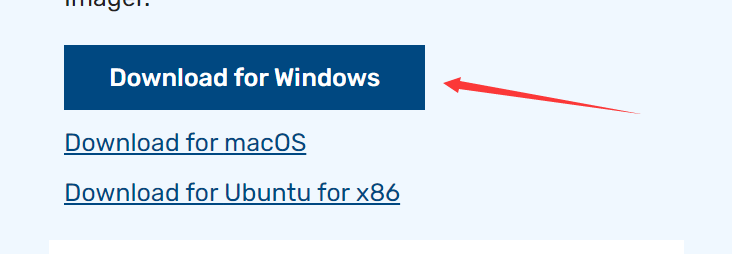
(5)安装Raspberry Pi Imager,此时可进行TF卡的烧录了。

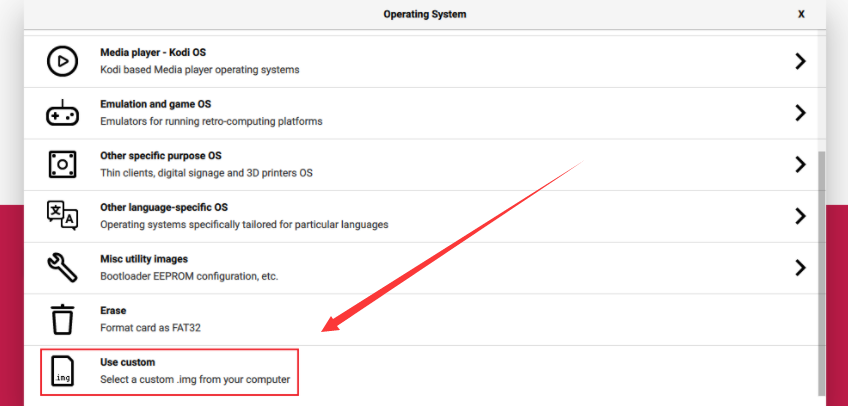
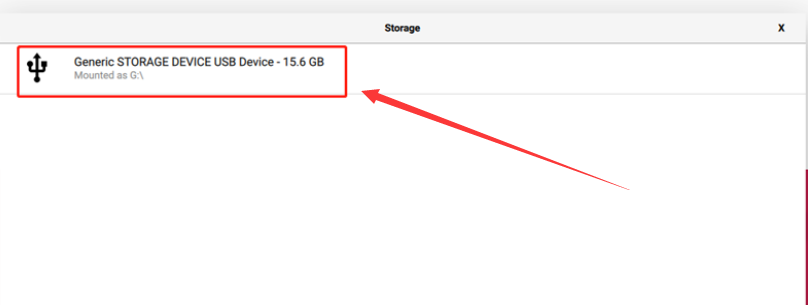


等待写入完成即可!
三、 系统安装
(1)TF卡的系统已经烧录完成,插入树莓派中,树莓派接上电源(没有屏幕,通过ssh连接到树莓派)首先是要获取树莓派的IP,我采用的是网线连接树莓派,在路由器的管理网址查看树莓派的IP地址。这只是获取IP的一种方法,还有其他的例如树莓派连接电脑网口,电脑连接无线网,此时也可通过电脑来查看树莓派的IP,根据情况而定吧,方法法总比困难多,难易程度不一样罢了。
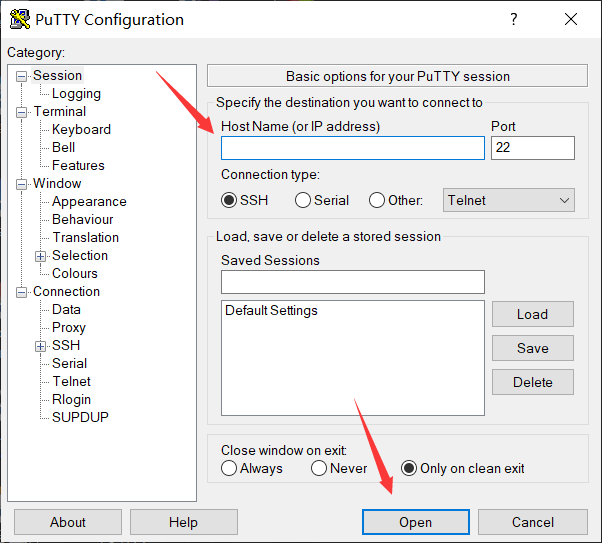
(2)ssh方法连接树莓派(已知树莓派IP)
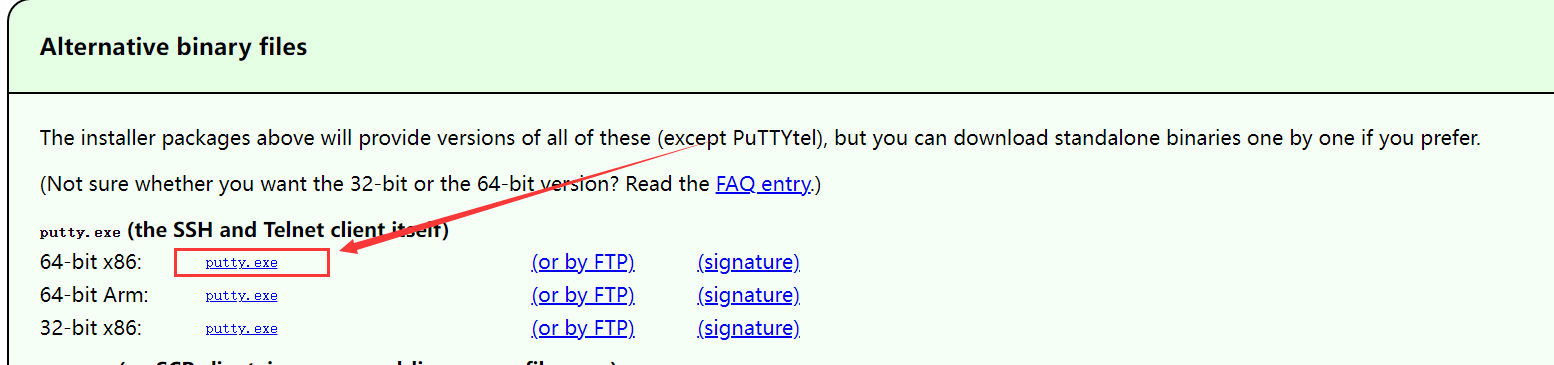
PuTTY官网下载地址
以下为使用方法
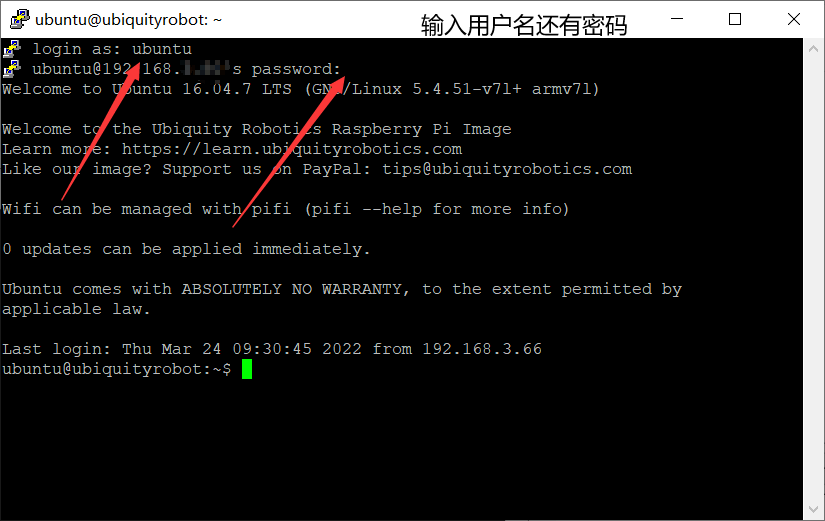
输入树莓派的IP即可
用户名为ubuntu,密码为ubuntu,完成后就进入了系统
(3)win10远程树莓派(有桌面)
首先是通过putty连接到树莓派后输入以下命令
安装xrdp
sudo apt-get install tightvncserver xrdp
安装成功后就可以通过win10自带的远程桌面进行连接了。
(4)用户密码的修改
输入以下命令就可更改了
sudo passwd root
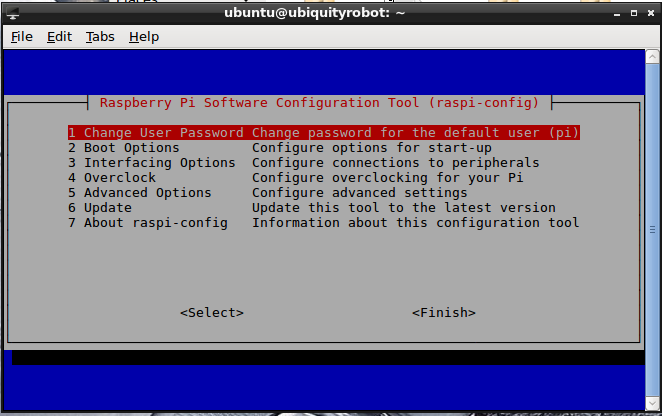
或者进入高级配置界面更改输入
sudo raspi-config
(5)时间校准-更改时区
我发现在这个安装的系统中只有重庆还有哈尔滨的时间,因为是在北方就选了Harbin
date
//再输入命令
sudo dpkg-reconfigure tzdata
//此时进行选区(亚洲、哈尔滨)
四、系统测试
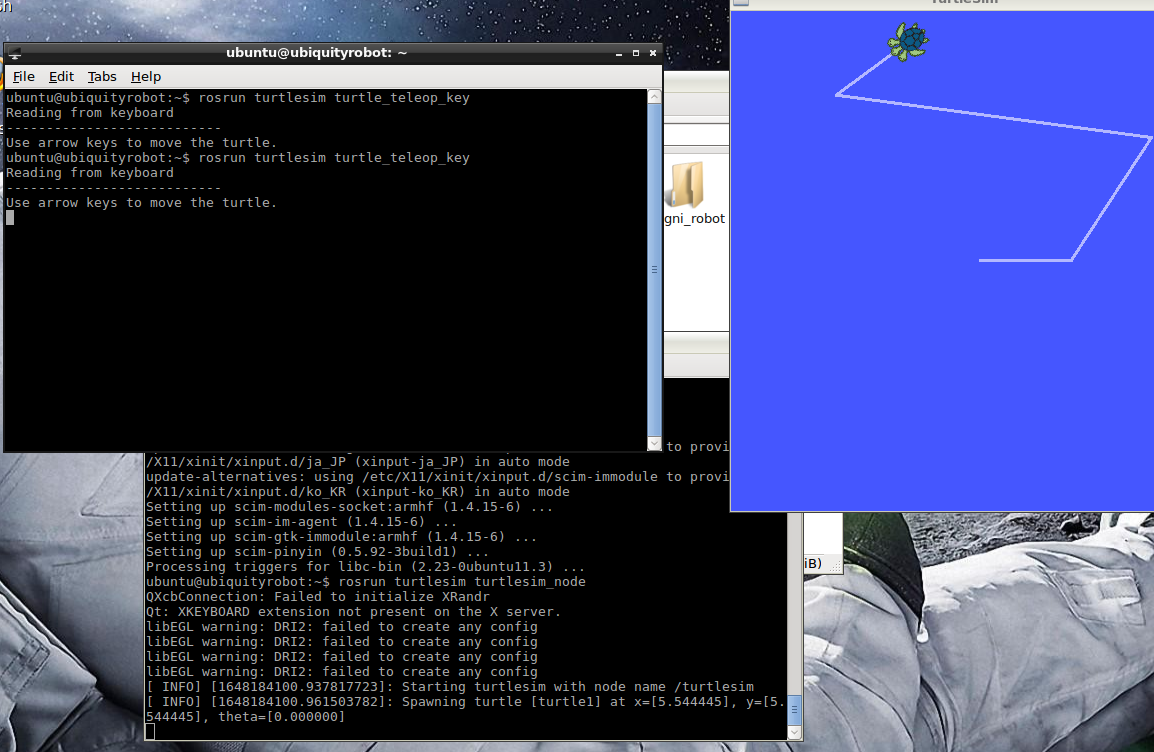
那就win10远程连接到树莓派,跑个小乌龟吧
ip地址已经有了,那就打开win10的远程桌面输入IP并输入用户名和密码进入远程桌面。
打开一个终端(Ctrl+Alt+T)输入rosrun turtlesim turtlesim_node(出现了小乌龟的图像)
再打开一个终端输入rosrun turtlesim turtle_teleop_key
这时就可以用方向键来控制小乌龟了。更换小乌龟界面的背景啊什么的我就不过多的叙述了,就是Ros相关的了。
总结
安装后跑了一个功能包试了一下,编译没有问题,树莓派里跑ros系统,打开的终端是不可以在同一终端输入多个命令,和在电脑上的ros实体机和虚拟机里ros系统之间的一个小区别。这个是简单的总结了一下,还有一个性能问题有待测试。
最后
以上就是魁梧蚂蚁最近收集整理的关于树莓派安装ROS系统【第一篇】树莓派装ROS系统(第一篇)一、 前期准备二、具体操作三、 系统安装四、系统测试总结的全部内容,更多相关树莓派安装ROS系统【第一篇】树莓派装ROS系统(第一篇)一、内容请搜索靠谱客的其他文章。








发表评论 取消回复