大家好,我是正在听着大悲咒写博客的小鱼。前段时间搬家,小仙女让我收拾一下自己的电子垃圾。里面居然发现了一块年纪久远的树莓派,其实也不算久,两三年前的树莓派3B,只是吃了太久的灰了,小仙女让小鱼挂在咸鱼上给买了。小鱼内心肯定是拒绝的,于是故意把价格写的很高,这样肯定就卖不掉。
最近小鱼在搞ROS2,所以就想要不在树莓派上转个ROS2,跟自己电脑多个ROS2多机通信啥的玩玩,于是就有了今天的文章。

1.准备工作
软件工具:
烧录工具: https://downloads.raspberrypi.org/imager/imager_1.6.2.exe
Ubuntu20镜像:https://ubuntu.com/download/raspberry-pi/thank-you?version=20.04.3&architecture=server-arm64+raspi
硬件工具:
电脑一台,已安装WIndows系统,装了虚拟机或者ubuntu双系统,用于烧录镜像和修改树莓派wifi地址
读卡器一个,用于给内存卡烧录镜像
吃灰树莓派一个,型号3B,多年前购买已经忘记价格
2.烧录镜像
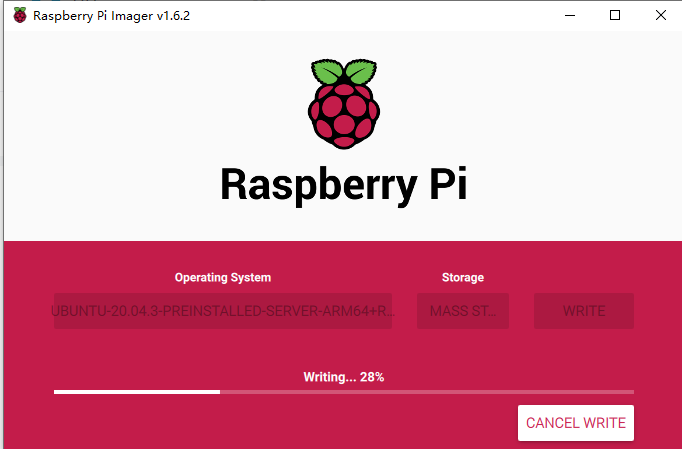
第一步安装烧录软件,安装完打开长的像下面这个样子的界面。
一共就三个按钮,第一个选择镜像,我们选择刚刚下载的ubuntu20的镜像就可以。

第二个选择设备,这个要把我们的内存卡插在读卡器上,然后把读卡器插在电脑上就能选择了

搞完前两个选项电机Write就可以写入,等待一会就可以完成。
3.修改树莓派的wifi账号和密码
烧录完成后,因为U盘格式发生了改变,Windows系统就没办法识别了,这个时候ubuntu虚拟机或者双系统就排上用场了。
这里小鱼以虚拟机为例,插上U盘,虚拟机就会跳出一个窗口
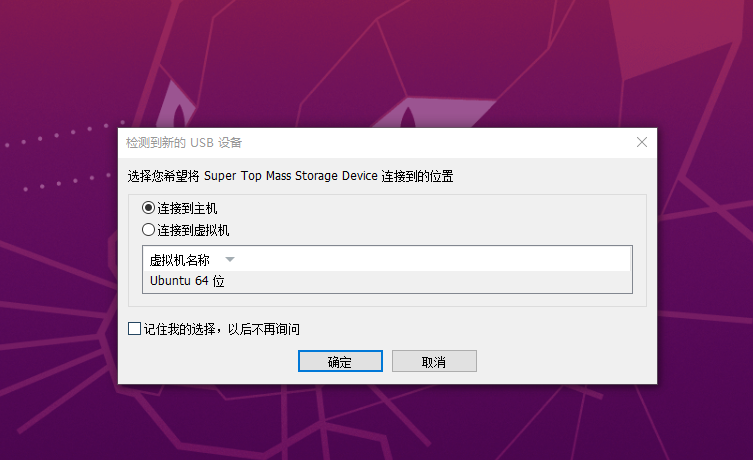
既然windows识别不了,我们就用ubuntu进行挂载。
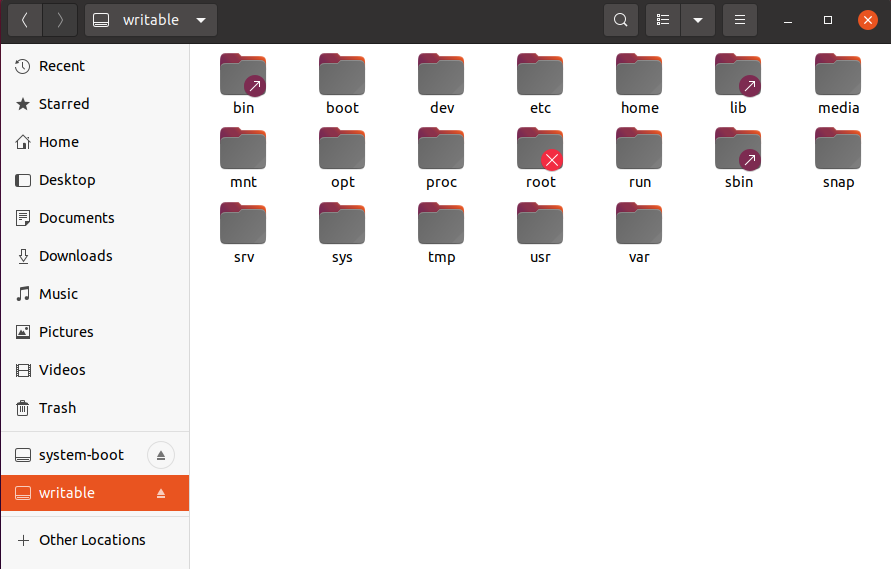
打开ubuntu的文件,就可以看到挂载的两个分区文件夹了。
选这个文件目录多的
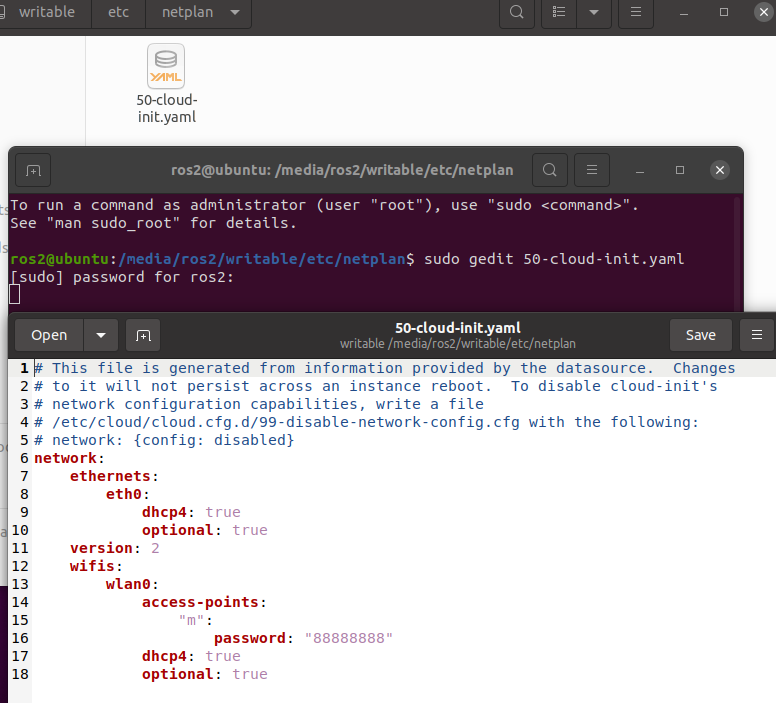
我们打开里面的/etc/netplan/文件夹,空白处右击在终端中打开
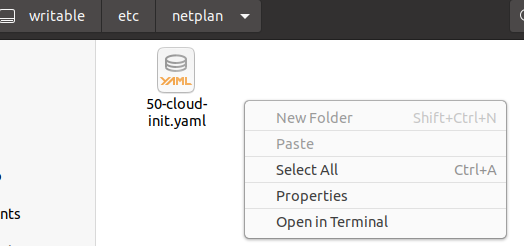
然后在终端中输入
sudo gedit 50-cloud-init.yaml
打开文本编辑器,在其中添加wifis相关设置,添加完成后的完成文件如下:
network:
ethernets:
eth0:
dhcp4: true
optional: true
version: 2
wifis:
wlan0:
access-points:
"m":
password: "88888888"
dhcp4: true
optional: true
这里小鱼使用的热点名称为m,密码为88888888用电脑开的热点
修改好保存,然后我们可以打开另外一个磁盘下的user-data文件,看一下系统默认的用户名和密码:
chpasswd:
expire: false
list:
- ubuntu:ubuntu
可以看到是ubuntu:ubuntu
3.插内存卡到树莓派开机
把U盘弹出,内存卡拔出来插在树莓派上,然后给树莓派通上电,开机!!
如果有显示器可以接可以把树莓派接在显示器上,这样就能看到完整的开机过程,否则只等等树莓派自己连上我们的wifi,然后通过wifi操作树莓派。
小鱼这里开好wifi坐等树莓派上线,小鱼的树莓派只支持2.4G哦~
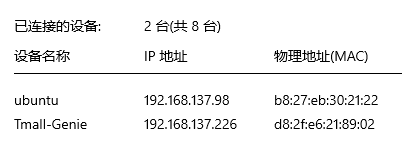
等了一会上线了,这时可以使用ssh连接我们的树莓派了
4.远程连接
打开终端,用户名@ip地址
ssh ubuntu@192.168.137.98
windows下可以使用powershell,也是挺好用的一个自带的软件
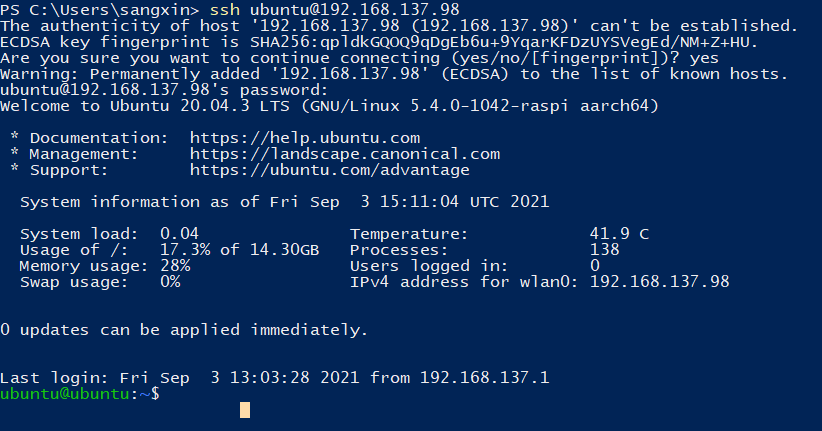
远程连接之后我们下一步就可以安装ROS2了
5.安装ROS2
这里不得不把小鱼的一行代码安装ROS2给拿出来用了
wget http://fishros.com/install -O fishros && . fishros
安装完成后
6.总结
脚本因为https的原因还有一些小问题,小鱼今天会努力修复好的~
最后祝大家周末愉快~
写在最后
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
初中学习编程,高中开始学习机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金)
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小鱼,一起交流技术,学习机器人

最后
以上就是伶俐牛排最近收集整理的关于小鱼吃灰多年的树莓派终于用上了,装个ROS2跑跑的全部内容,更多相关小鱼吃灰多年内容请搜索靠谱客的其他文章。








发表评论 取消回复