一、安装树莓派及arduino开发环境
1、arduino开发环境在前面的文章中已经说明,有需要的朋友可以参看“arduino控制二路电机运动”这篇博文。
2、搭建树莓派串口通信开发环境
(1)安装python:
sudo apt-get update
sudo apt-get install python
(2)安装python的GPIO模块,用于控制LED、电机等:
wget https://sourceforge.net/projects/raspberry-gpio-python/files/RPi.GPIO-0.6.2.tar.gz (下载GPIO库,因为更新,具体参考官网网址变动)
tar xvzf RPi.GPIO-0.6.2.tar.gz (tar解压)
cdRPi.GPIO-0.6.2 (进入解压后的文件夹)
sudo python setup.py install (安装GPIO库文件)
(3)安装serial,用于串口通信及USB通信:
sudo apt-get install python-serial
(4)检验前三步环境安装是否正确
#用nano编辑器编辑一个test文件
sudo nano test.py
#在test.py文件中写入下面两行代码
import serial
import RPi.GPIO
#运行python test.py语句,如果没有报错说明树莓派开发环境搭建正确。
到此树莓派及arduino通信开发环境搭建完毕,下面讲解具体通信实现。
二、树莓派与arduino通过USB进行通信
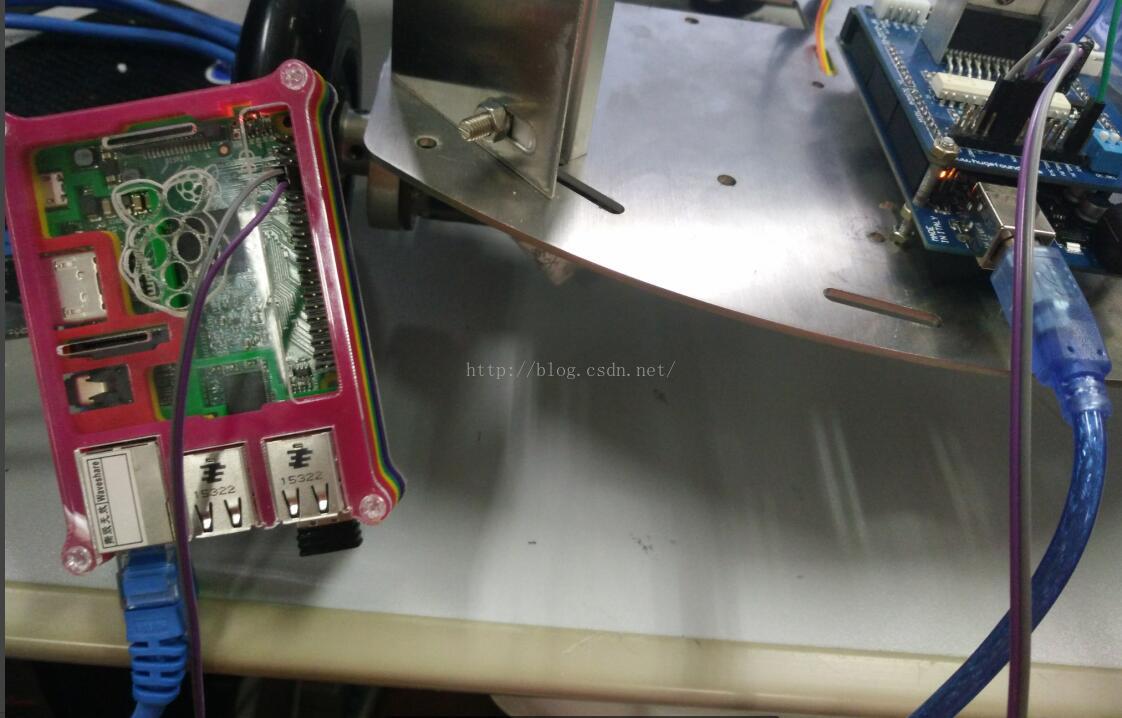
1、将树莓派与arduino通过usb线进行连接

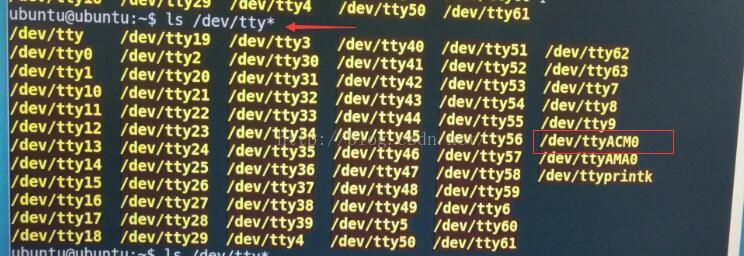
2、在树莓派终端输入 ls /dev/tty*查看两者连接端口的名字。查看有没有ttyACM0 这个文件(注只有在两个硬件USB互连的情况下才会有这个。如果两者没有连接是不会有的) 最新的系统一般都会自动生成。看到ttyACM0就说明二者可以通讯了 接下来上测试代码。
3、编写树莓派与arduino通信代码。
arduino代码:
void setup()
{
Serial.begin(9600); // 9600 bps
}
void loop()
{
if ( Serial.available())
{
if('s' == Serial.read())
Serial.println("Hello Raspberry,I am Arduino.");
}
}
把上面代码通过python IDE下载到arduino中,然后再再与树莓派usb链接。
树莓派代码: import serial #import serial module
ser = serial.Serial('/dev/ttyACM1', 9600,timeout=1); #open named port at 9600,1s timeot
#try and exceptstructure are exception handler
try:
while 1:
ser.write('s');#writ a string to port
response = ser.readall();#read a string from port
print response;
except:
ser.close();
我这里把上面代码在树莓派中保存为communication.py文件。
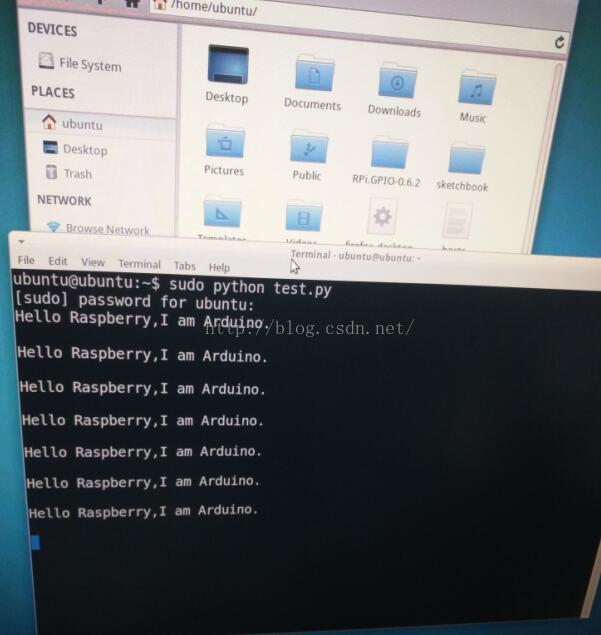
2、在树莓派终端输入sudo python communication.py运行程序。
显示结果:
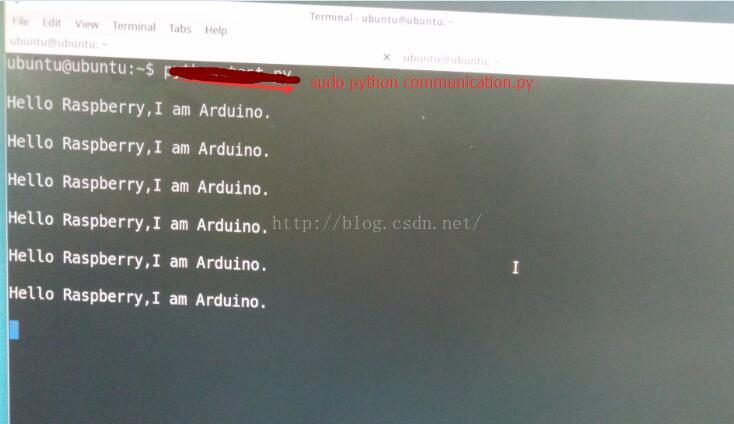
此图是两者之间的通信结果:树莓派向arduino发送一个字符‘s’,arduino向树莓派回复字符串“hello raspberry,i am arduino”。
三、树莓派与arduino通过GPIO引脚通信
1、连接方式:
树莓派的RX ----- arduino的TX
树莓派的TX ----- arduino的RX
树莓派的GND ----- arduino的GND
2、修改树莓派配置文件(要看详细的请移步这里 http://www.eeboard.com/bbs/thread-8574-1-1.html) (1)修改cmdline.txt
输入
变成这样 ctrl+x 按Y保存退出
2.修改inittab 然后禁止掉从串口登录的功能,
输入 找到 这一行 在前面加个#注释掉这一行变成 ctrl+x 按Y保存退出
然后重启树莓派,之后树莓派的pin8(GPIO14) pin10(GPIO15)这两个口就可以当成普通的串口来用了 现在你可以像使用一个普通串口那样使用/dev/ttyAMA0了。
3、实验代码及效果
只需要将上面USB通信树莓派上的代码ser = serial.Serial('/dev/ttyACM1', 9600,timeout=1); 中的ttyACM1改成ttyAMA0即可。
到此树莓派与arduino通过USB和GGPIO两种通信方式介绍完毕。
最后
以上就是哭泣电灯胆最近收集整理的关于树莓派与arduino通信的全部内容,更多相关树莓派与arduino通信内容请搜索靠谱客的其他文章。








发表评论 取消回复