1、下载arduino IDE
在树莓派中进行arduino开发,首先需要下载对应版本的IDE,由于树莓派的CPU是ARM芯片,因此需要下载ARM版本的arduino IDE。
下载网址:https://www.arduino.cc/en/Main/Software
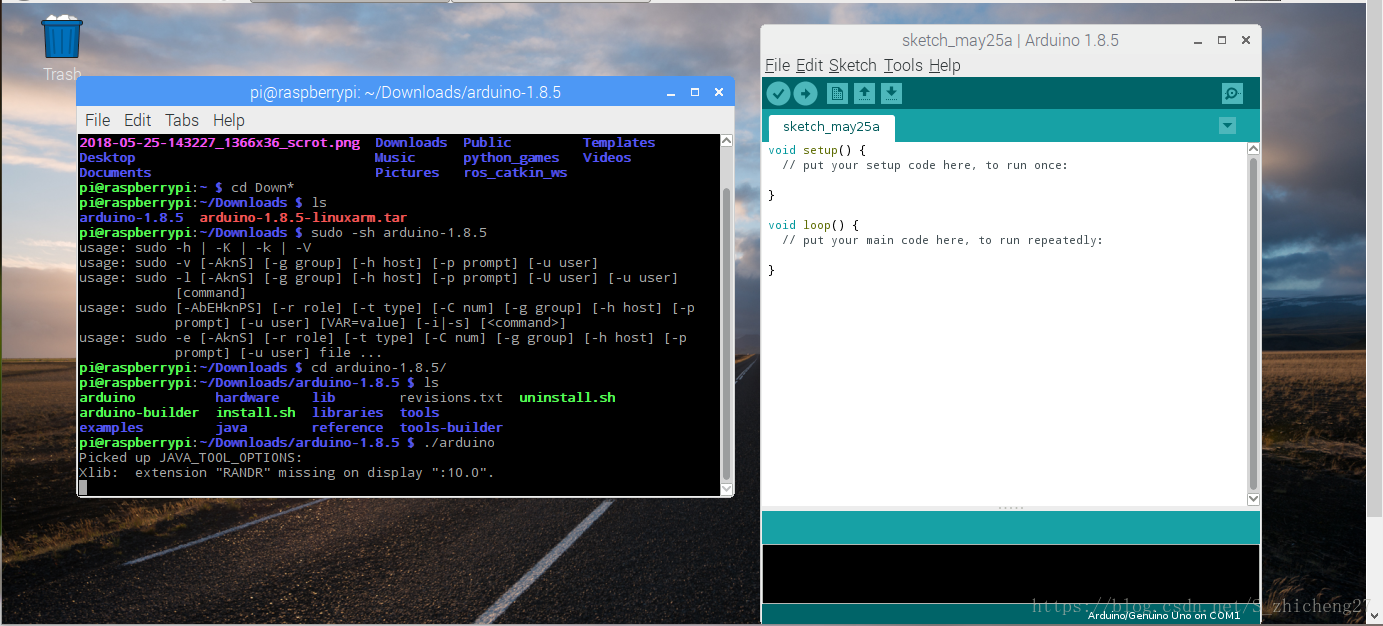
2、通过sftp方式发送至树莓派 ~/Downlads目录下
在树莓派中软件解压,解压命令分为两条,解压完成后直接找到arduino执行文件就可以了,我这边是1.8.5版本的
- xz -d arduino-1.8.5-linuxarm.tar.xz
- tar -xvf arduino-1.8.5-linuxarm.tar
4、在确保arduino IDE可以在树莓派中正常工作,且可以下载程序到arduino板子中,程序可以正常运行且可以查看串口打印输出信息。接下来配置rosserial_arduino功能包,目的是可以直接在arduino IDE中直接编写ROS代码,rosserial提供arduino和ros通讯的通讯协议,这样一来,arduino板子就可以变成一个双全工的ros结点,可以直接订阅和发布ROS节点消息。
5、在树莓派中的ROS工作空间中,下载源码并编译该包
- cd ros_catkin_ws/src
- git clone https://github.com/ros-drivers/rosserial.git
- cd ros_catkin_ws
- catkin_make -j2
- catkin_make install
6、将ros_lib库安装到arduino开发环境中,共有三条命令
- cd /libraries
- rm -rf ros_lib
- rosrun rosserial_arduino make_libraries.py
执行完以上命令,基本就完成了树莓派下arduino开发环境的搭建,剩下我们需要查看以下ros_lib库是否安装正确,打开IDE,如果可以在File—>Example->ros_lib找到ros_lib选项,则说明安装环境没有问题。
学习ROS小课堂视频中记录的笔记,有问题可以留言哈
这里是大神链接
最后
以上就是温暖野狼最近收集整理的关于树莓派上的ROS学习2---搭建Arduino开发环境的全部内容,更多相关树莓派上内容请搜索靠谱客的其他文章。








发表评论 取消回复