今天看下具体的代码设计
我们有三个按钮,分别控制为停止,复位和启动;
上电后,我们复位所有轴,即回零所有轴;
回零后,我们点击启动按钮,伺服到达工作位,等待2秒后,伺服到达上料位,等待3秒后伺服到达下料位,等待2秒后伺服回到工作位,然后循环执行一直等到按下停止按钮结束。
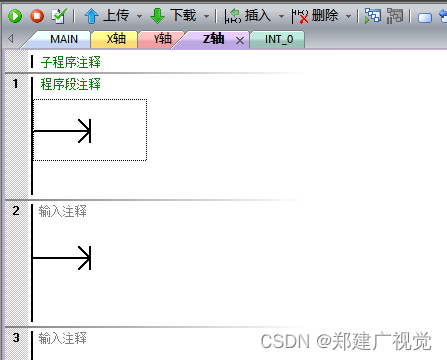
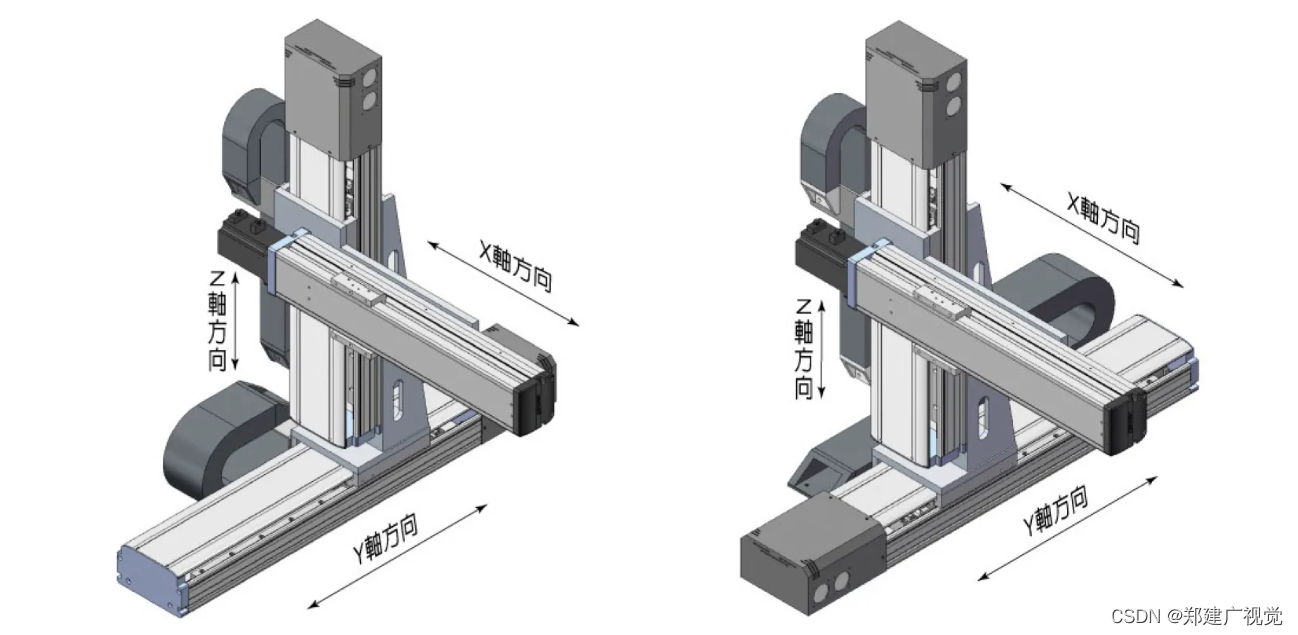
先创建3个子程序,我们分别写三个轴的控制程序。
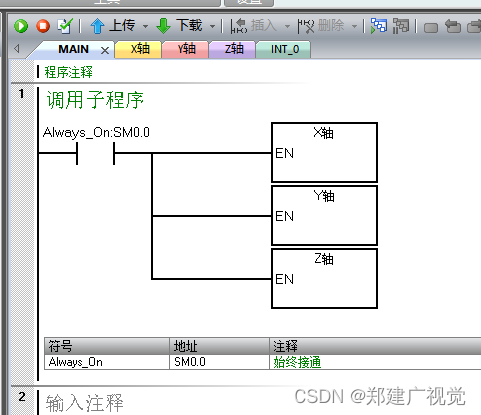
在主程序中调用这三个子程序
我们先把三个轴的主体程序写好
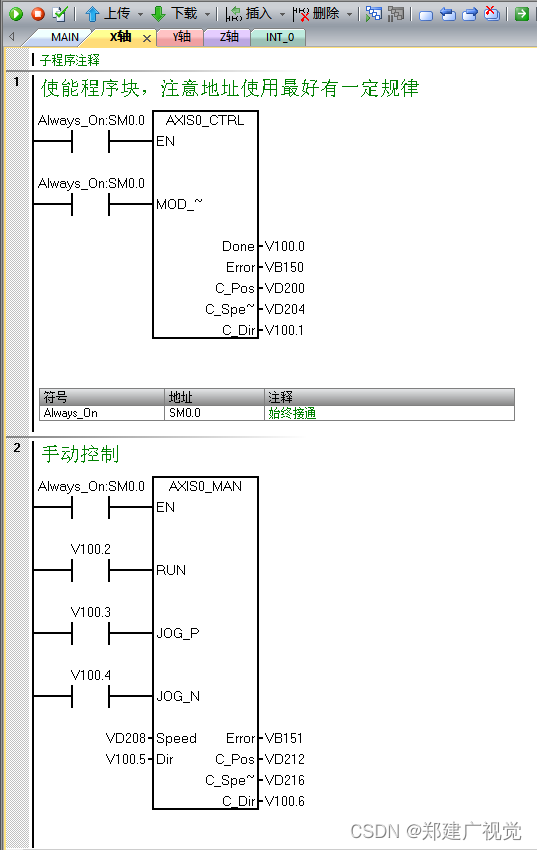
V100.3和V100.4控制时,速度和方向是我们在工具向导中已经确定好的,不能动态修改,如果想要修改,必须修改向导里的JOG中速度的值,然后再次生成下载到PLC中。
V100.3和V100.4的控制逻辑是,接通,伺服
最后
以上就是犹豫招牌最近收集整理的关于S7-200SMART案例分析——运动控制编程三轴控制(二)的全部内容,更多相关S7-200SMART案例分析——运动控制编程三轴控制(二)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复