关注同名微信公众号“混沌无形”,阅读更多有趣好文!
原文链接:https://mp.weixin.qq.com/s/GWhlXsuY6QYyoZydaSYpjQ(包含原文PDF百度云下载链接)

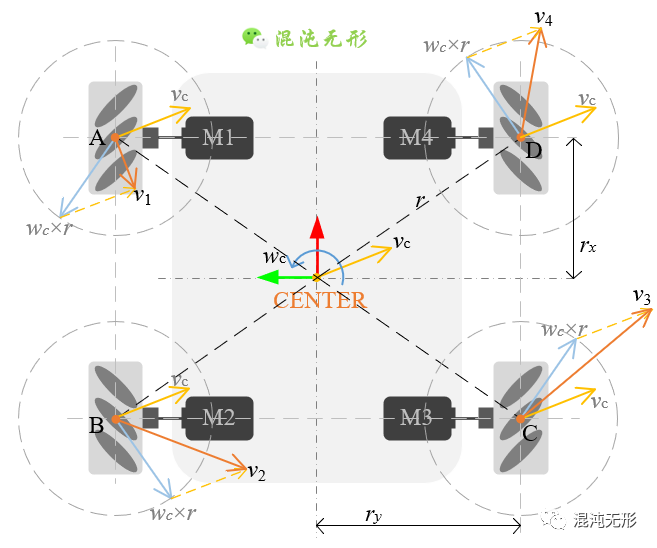
那就先从逆运动模型开始:已知点CENTER速度[vc wc]T,需要分解到各个麦轮上,采用平面刚体运动规律分析方法,单个麦轮的速度是由点CENTER速度及角速度共同作用合成的,可表示为
式中,vi表示第i个麦轮的合速度,对应图 2.4中的橘黄色箭头;vc表示点CENTER的线速度,对应图 2.4中淡黄色箭头;wc表示点CENTER的角速度速度,r表示点CENTER到麦轮与地面接触点的矢量,因此wc×r表示由麦轮平台按角速度wc自旋产生的速度,对应图 2.4中浅蓝色箭头,该分速度方向及大小满足叉乘计算规则(右手定则),且公式中均为矢量运算,遵循平行四边形法则。
精彩的理论论证过程见原文链接(含全文下载链接)
由于网页排版效果一般,所以笔者按照期刊论文版式为小伙伴们整理了原文PDF,方便收藏和回味。
原文链接:https://mp.weixin.qq.com/s/GWhlXsuY6QYyoZydaSYpjQ(包含原文PDF百度云下载链接)
CSDN下载链接:https://download.csdn.net/download/qq_19598969/19860792如果喜欢的话,可以关注同名微信公众号“混沌无形”,阅读更多有趣好文!

最后
以上就是虚拟小松鼠最近收集整理的关于麦克纳姆轮全向移动机器人速度分解的全部内容,更多相关麦克纳姆轮全向移动机器人速度分解内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复