目录
定时器部分:
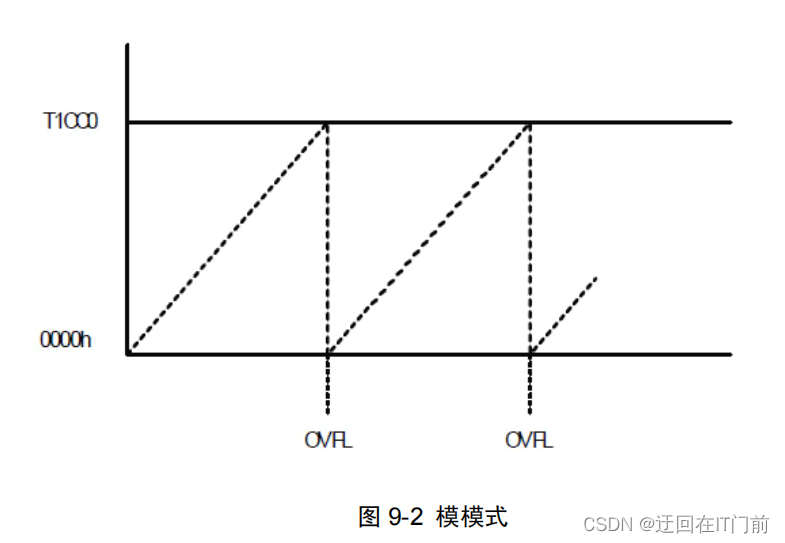
定时器三种模式
定时公式:
定时器1配置步骤:
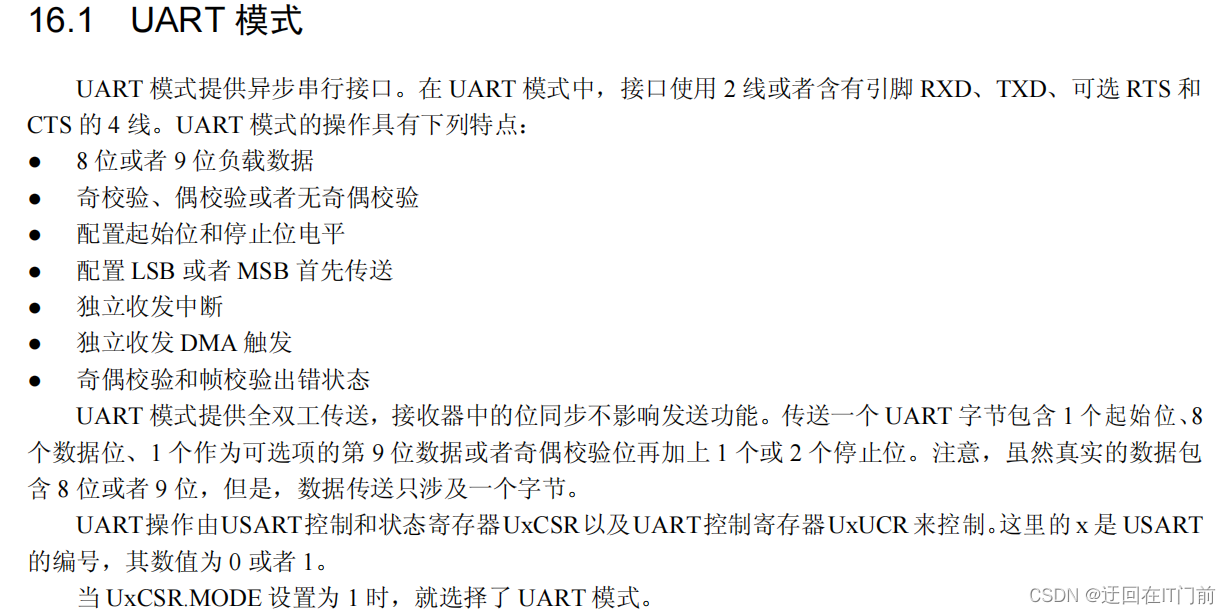
串口部分:
UART配置基本步骤:
ADC部分:
ADC 输入:
ADC 转换时间:
Tconv = (抽取率 + 16) x 0.25 μs。
ADC 转换结果:
ADC 转换序列:
ADC配置步骤:
定时器部分:
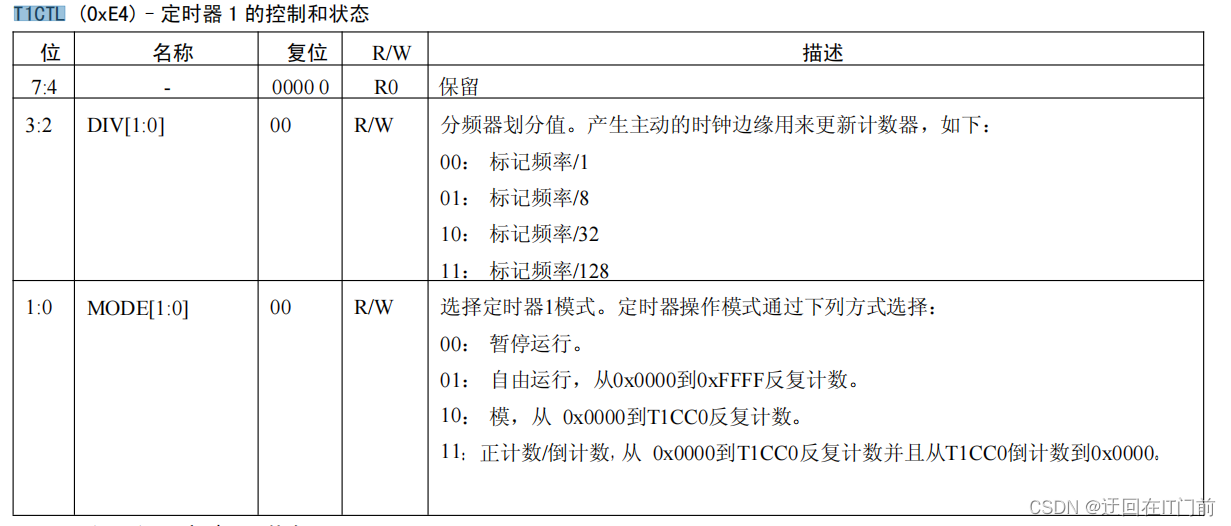
定时器三种模式:自由运行模式,模模式,正计数/倒计数模式
实现定时多长时间的公式:
最大计数值=定时时长/定时计数周期
定时计数周期=(1/晶振)X 分频系数;
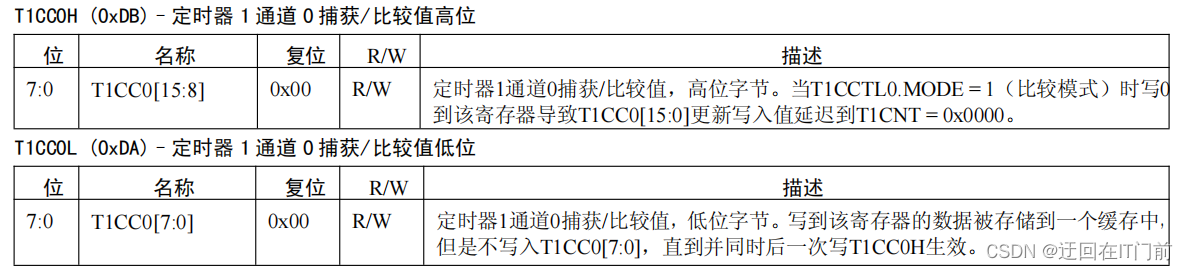
T1CC0H和T1CC0L寄存器:
定时器1配置步骤:
(1)打开总中断,打开定时器1的中断
(2)选择计数模式,和分频系数
(3)通过T1CCTL0 寄存器,选择定时器 1 通 0 捕获/比较模式
(4)定时时长,将计数值分别配置给T1CC0H和T1CC0L这两个寄存器
(5)编写定时器1相关中断服务函数
Timer.c
#include "Timer.h"
unsigned long SysTick= 0;
void TimerInit(void)
{
IEN0 |= 0x01<<7; //打开总中断
IEN1 |= 0x01<<1; //定时器1中断使能
TIMIF |= 0x01<<6; //定时器1溢出中断屏蔽
T1CCTL0 |= 0x01<<2; //比较模式
T1CTL = 0x0e; //128分频,模模式
T1CC0H = 0x61; //定时0.1s
T1CC0L = 0xA8; //定时时间/(1/32)x128=oxc350
}
unsigned long TimerSet(unsigned long set){
return SysTick + set;
}
unsigned char TimerCheck(unsigned long t){
if(SysTick>=t)
return 1;
else
return 0;
}
#pragma vector = T1_VECTOR //中断服务子程序
__interrupt void T1_ISR(void)
{
SysTick++;
IRCON &=~0x01<<1; //清除定时器1中断标志
T1STAT &=~0x01<<5; //定时器 1 计数器溢出中断标志置0
}串口部分:
本次选用UART模式:

UART配置基本步骤:
(1)UART引脚:P0_2和P0_3为外设功能,分别作为RX,TX;RX配置为输入,TX配置为输出
(2)偶校验,9位数据传输
(3)配置波特率为256
(4)使能UART0的TX,RX的中断
(5)编写中断服务函数
Uart.c
#include "Uart.h"
#include <string.h>
#define UART_TX_MAX_SIZE 255
#define UART_RX_MAX_SIZE 255
static unsigned char UartTxBuf[UART_TX_MAX_SIZE];
static unsigned char UartTxLen = 0;
static unsigned char UartTxPos = 0;
static unsigned char UartRxBuf[UART_RX_MAX_SIZE];
static unsigned char UartRxPos = 0;
void UartInit(void)
{
P0SEL |= 0x01<<2|0x01<<3; //设置P0_2和P0_3为外设功能,分别作为RX,TX
P0DIR &= ~0x01<<2; //配置RX为输入
P0DIR |= 0x01<<3; //配置TX为输出
P1SEL &= ~(0x01<<0|0x01<<1);
P1DIR |= 0x01<<0|0x01<<1;
P2DIR &= ~0xc0;
PERCFG &= ~0x01<<0;
U0CSR |= 0x01<<7|0x01<<6; //设置为UART模式,UART接收器使能
U0UCR |= 0x01<<3|0x01<<4|0x01<<5; //偶校验,9位传输
U0GCR = 8;
U0BAUD = 59; //波特率为256
IEN0 |= 0x01<<7|0x01<<2; //打开总中断,使能UART0的RX中断
IEN2 |= 0x01<<2; //使能UART0的TX中断
}
void UartSend(unsigned char *data,unsigned char size){
memcpy(UartTxBuf,data,size); //将要发送的数据data复制到UartTxBuf,被复制的字节数为size
UartTxLen = size;
UartTxPos = 1;
U0DBUF = UartTxBuf[0]; //U0DBUF接收/发送数据缓冲寄存器,将要发送的数据写入U0DBUF
}
unsigned char UartRecv(unsigned char *data,unsigned char size){
unsigned char realLen = size;
if(size > UartRxPos){
realLen = UartRxPos;
}
memcpy(data,UartRxBuf,realLen);
memcpy(UartRxBuf,UartRxBuf + realLen,UartRxPos - realLen);
UartRxPos -= realLen;
return realLen;
}
//TX中断服务函数
#pragma vector = UTX0_VECTOR
__interrupt void Uart0TxInterrupt(void){
UTX0IF = 0;
if(UartTxPos < UartTxLen){
U0DBUF = UartTxBuf[UartTxPos++];
}
}
//RX中断服务函数
#pragma vector = URX0_VECTOR
__interrupt void Uart0RxInterrupt(void){
URX0IF = 0;
if(UartRxPos < UART_RX_MAX_SIZE){
UartRxBuf[UartRxPos++] = U0DBUF;
}
}ADC部分:
ADC简介:
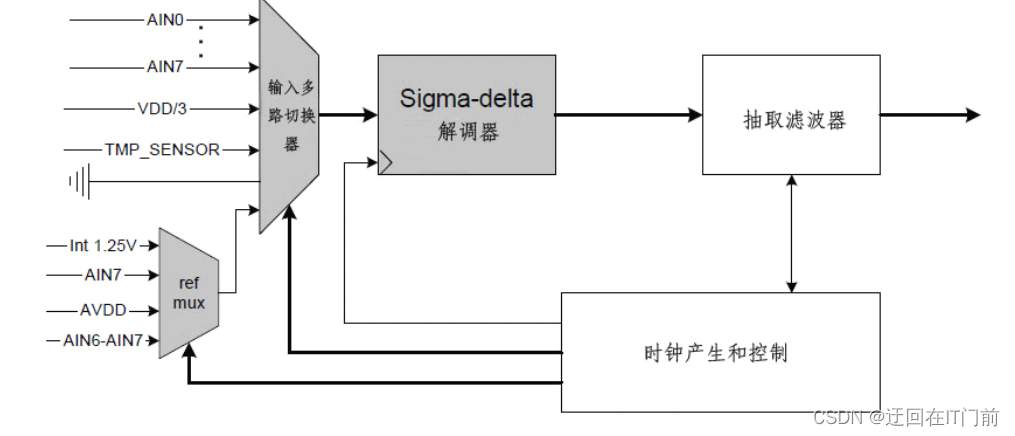
ADC 输入:
ADC 转换时间:
Tconv = (抽取率 + 16) x 0.25 μs。
ADC 转换结果:
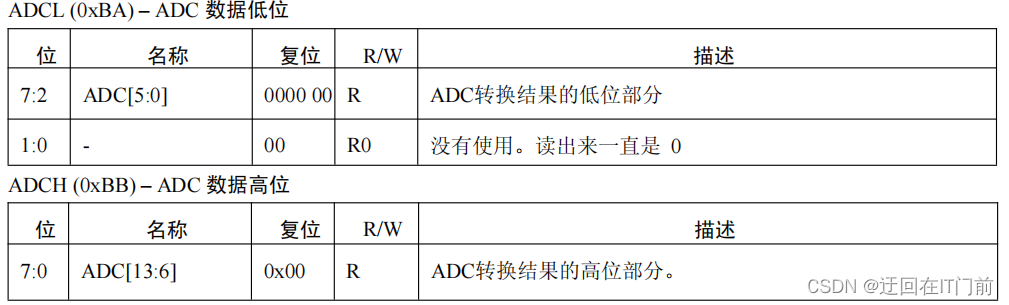
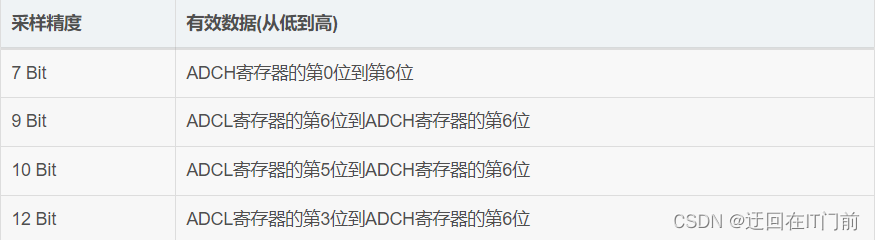
ADCL寄存器和ADCH寄存器保存的是AD转换完成的结果,数据以2的补码形式表现。下表为采样精度与有效数据解析表:
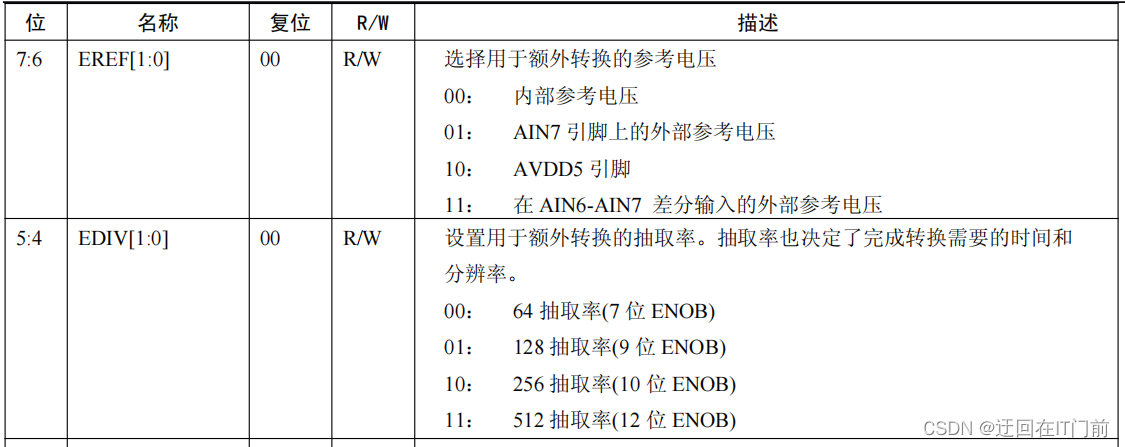
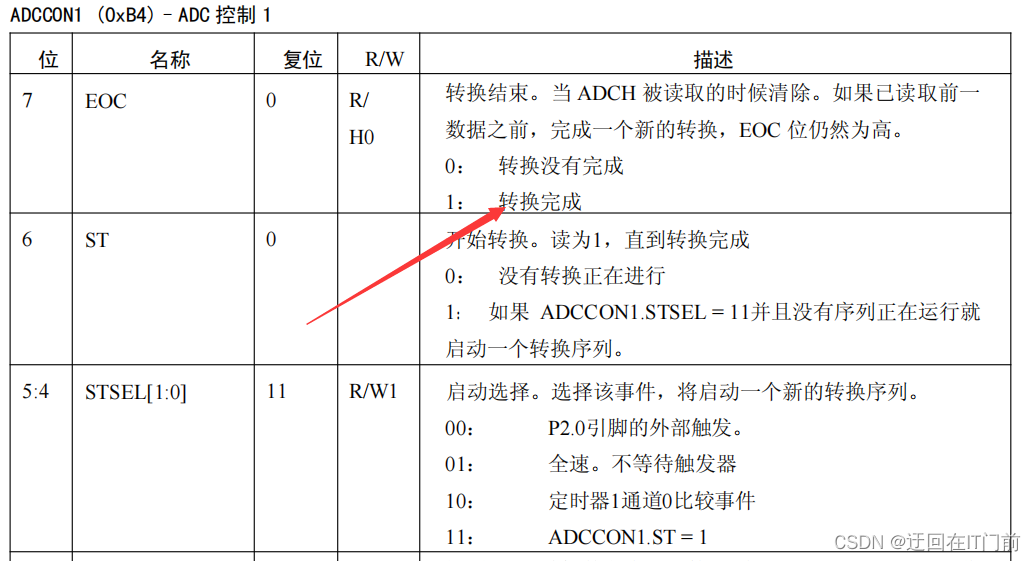
ADC 转换序列:
ADCCON3 :寄存器控制单个转换的通道号码、参考电压和抽取率。
ADC配置步骤:
(1)使能模拟外设I/O
(2)选择有ADC功能的引脚配置为外设功能
(3)配置I/O的方向为输入
(4)通过ADCCON3配置ADC 参考电压和抽取率(本次选用AVDD5 引脚(3.3V)和选择512抽取率),模拟数字转换的正参考电压可选择为一个内部生成的电压,AVDD5 引脚;适用于 AIN7 输入引脚的外部电 压,或适用于 AIN6-AIN7 输入引脚的差分电压。
(5)将结果放在 ADCH 和 ADCL 两个寄存器中,结果=value/(2的12次方)* 3.3
ADC.c
#include "adc.h"
void ADCInit(void)
{
APCFG |= 0x01;// 模拟I/O使能
P0SEL |= 0x01; //P0_0当ADC0使用
P0DIR &= ~0x01; //配置为输入
}
float GetADCVoltage(void){
unsigned int value;
ADCCON3 = 0xB0;// 转换完成后 bit0-bit3 会自动清,所以每次读取都需要进行一次初始化
while(!(ADCCON1 & 0x80));
value = ADCH << 8;
value |= ADCL;
value >>= 3; //ADCL低位寄存器 1:0没有使用
return value / 4096.0 * 3.3;
}
main.c:
使用UART0打印出ADC采集的数据
#include <ioCC2530.h>
#include "Uart.h"
#include "Timer.h"
#include "led.h"
#include "Uart.h"
#include "ADC.h"
#include <stdio.h>
static void SysClockInit(void)
{
CLKCONCMD &= ~0x40; //设置系统时钟源为32MHz晶振
for(; CLKCONSTA & 0x40;); //等待晶振稳定
CLKCONCMD &= ~0X47; //设置系统主时钟频率为32MHz
}
void main(void)
{
unsigned long timer = 0;
unsigned char buf[100];
unsigned char len;
SysClockInit();
UartInit();
TimerInit();
ledinit();
ADCInit();
while(1)
{
if(TimerCheck(timer))
{
timer = TimerSet(10);
ledtoggle(0);
len = sprintf((char *)buf,"DC Vlotage = %.2fn",GetADCVoltage());
UartSend(buf,len);
}
}
}
补充:sprintf函数的格式:int sprintf( char *buffer, const char *format [, argument,...] );
buffer:这个参数就是接收字符串的字符数组。其大小必须要大于所接收的字符串的大小,否则的话会有空间不够从而导致内存溢出的风险。(这里比较大小时还要考虑到字符串最后的 ‘�’)
format:要传的字符串
除了前两个参数固定外,可选参数可以是任意个
最后
以上就是快乐枫叶最近收集整理的关于CC2530之ADC采集的全部内容,更多相关CC2530之ADC采集内容请搜索靠谱客的其他文章。








发表评论 取消回复