最近在做关于工业级相机POINTGREY的应用,查阅相关资料大部分以FlyCapture2,以及C++的应用为主,但是由于VS的环境配置不太友好同时由于自己下载的FlyCapture2的SDK打不开因此寻找别的思路,由于SPINNAKER的SDK是有用的因此基于SPINNAKER进行开发。本文基于Pycharm2019+python3.7的环境下,调用opencv,EasySpin,PySpin,的库实现POINTGREY工业级相机的开发。
1.Spinnaker SDK
首先,需要去Spinnaker SDK | Teledyne FLIR官网上下载相应的SDK
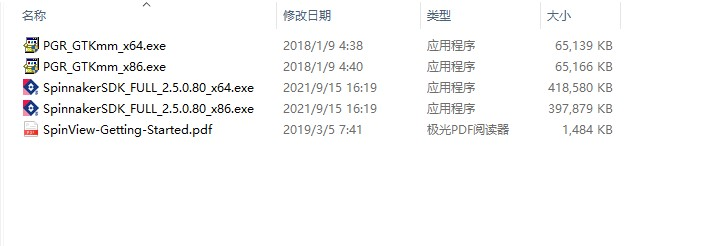
选择WINDOWS,解压得到一下文件

下载Latest Spinnaker Full SDK中的SDK
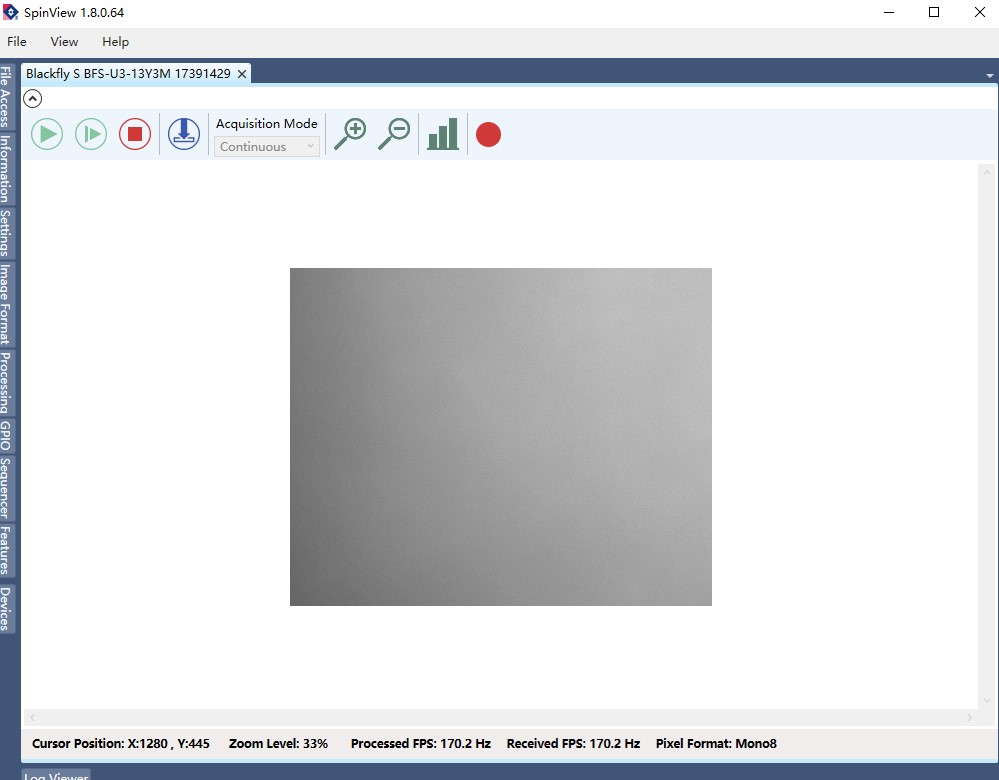
下载完成后打开SpinView查看是否有用(之前想做FlyCapture但是FlyCapture打不开)
2.Pycharm+Python的环境(可自行配置)
3.EasyPySpin库
在查找相关资料的时候在git-hub上找到了一个库,该库能够实现用opencv的方式调用Spinnaker的摄像头方便后续的图像处理。elerac/EasyPySpin: cv2.VideoCapture like wrapper for FLIR Spinnaker SDK (github.com) https://github.com/elerac/EasyPySpin
https://github.com/elerac/EasyPySpin
相关使用说明在其中,在Pycharm中能够通过Seting搜索
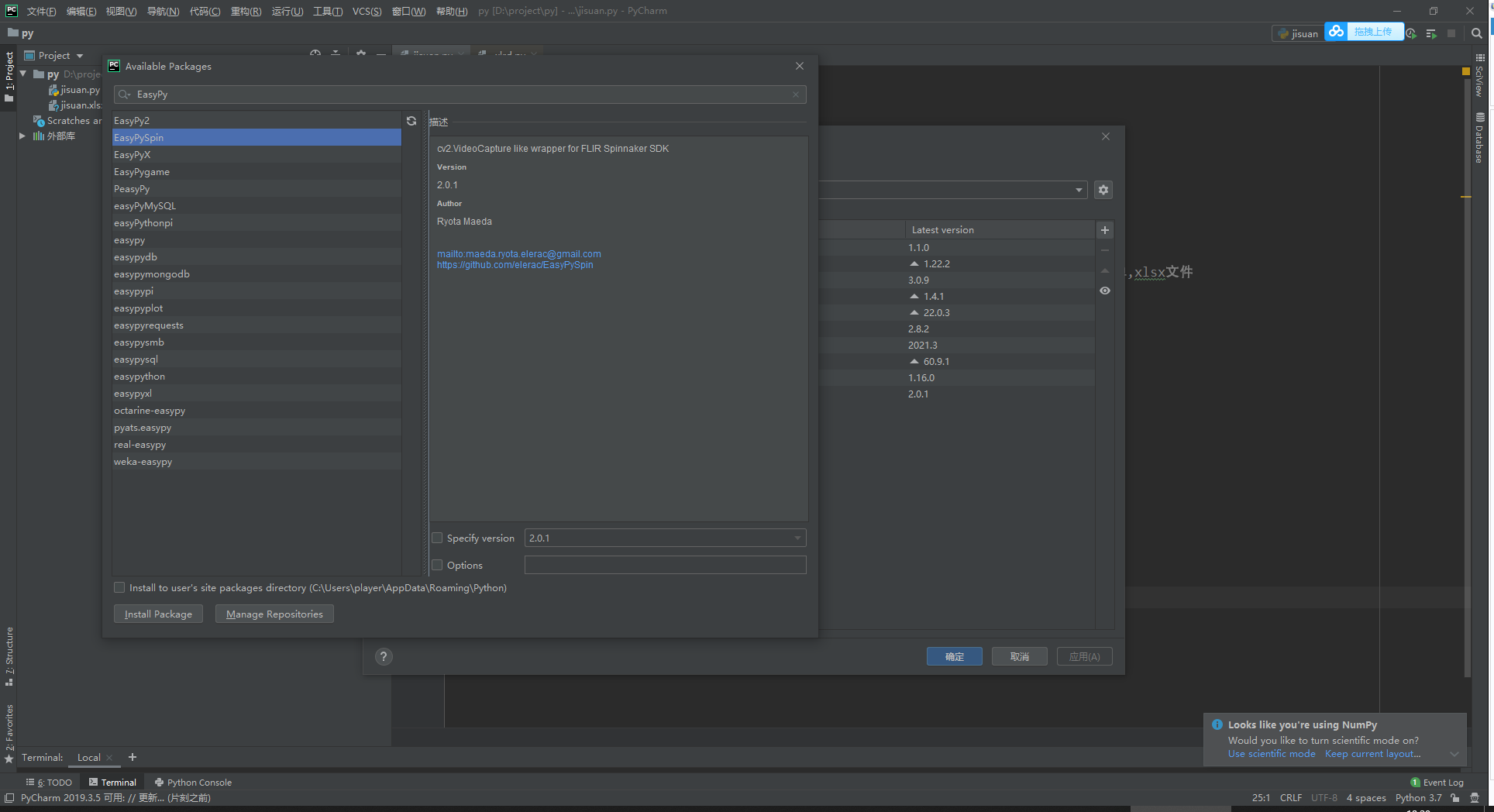
进行下载
4.PySpin
如果只调用EasyPySpin的库直接运行程序,会提示缺少PySpin的库函数因此需要安装PySpin库,该库不能通过setting进行安装需要
利用 Latest Python Spinnaker中的whl文件进行安装

选择对应版本的Spin(其中cp是对应python的版本)
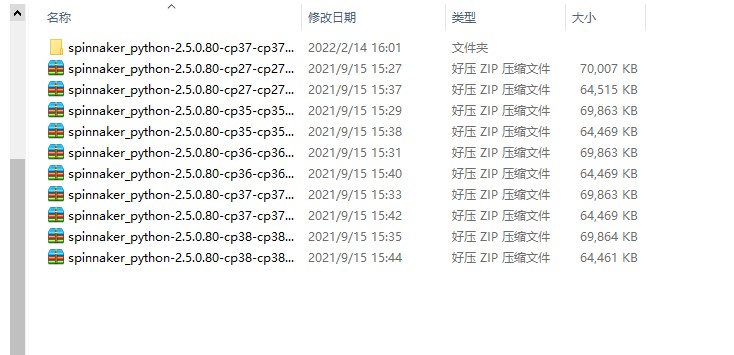
然后安装whl的文件
使用pip install 文件名.whl
5.运行Example程序
"""A simple example of capturing and displaying an image
"""
import EasyPySpin
import cv2
def main():
cap = EasyPySpin.VideoCapture(0)
if not cap.isOpened():
print("Camera can't opennexit")
return -1
cap.set(cv2.CAP_PROP_EXPOSURE, -1) # -1 sets exposure_time to auto
cap.set(cv2.CAP_PROP_GAIN, -1) # -1 sets gain to auto
while True:
ret, frame = cap.read()
# frame = cv2.cvtColor(frame, cv2.COLOR_BayerBG2BGR) # for RGB camera demosaicing
img_show = cv2.resize(frame, None, fx=0.25, fy=0.25)
cv2.imshow("press q to quit", img_show)
key = cv2.waitKey(30)
if key == ord("q"):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
结果如下: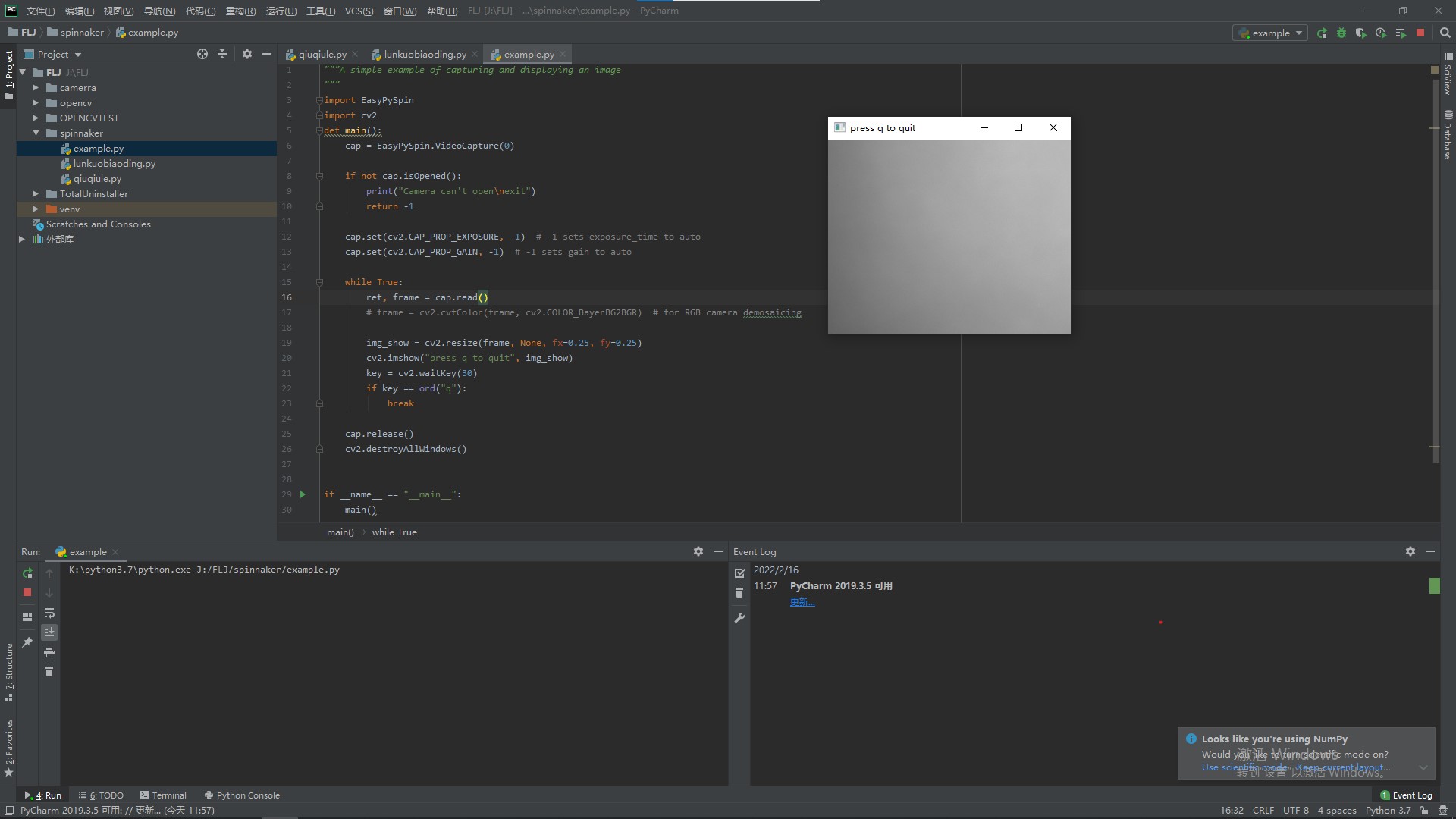
"""A simple example of capturing and displaying an image
"""
import EasyPySpin
import cv2
import numpy as np
import math
import copy
def main():
cap = EasyPySpin.VideoCapture(0)
if not cap.isOpened():
print("Camera can't opennexit")
return -1
frameNum = 0
cap.set(cv2.CAP_PROP_EXPOSURE, -1) # -1 sets exposure_time to auto 自动曝光时间
cap.set(cv2.CAP_PROP_GAIN, -1) # -1 sets gain to auto 自动增益
while True:
ret, frame = cap.read()
# frame = cv2.cvtColor(frame, cv2.COLOR_BayerBG2BGR) # for RGB camera demosaicing
frameNum += 1
if ret == True:
tempframe = frame
if (frameNum == 1):
previousframe = frame
print(111)
if (frameNum >= 2):
currentframe = tempframe
currentframe = cv2.absdiff(currentframe, previousframe) #帧差法图
median = cv2.medianBlur(currentframe, 3) #中值滤波
ret, threshold_frame = cv2.threshold(currentframe, 20, 255, cv2.THRESH_BINARY)
gauss_image = cv2.GaussianBlur(threshold_frame, (3 ,3), 0)
contours, hierarchy = cv2.findContours(threshold_frame, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
yuantu_show = cv2.resize(frame, None, fx=0.25, fy=0.25)
intital_show = cv2.resize(frame, None, fx=0.25, fy=0.25)
img_show = cv2.resize(gauss_image, None, fx=0.25, fy=0.25)
# 画出矩形轮廓
for i in range(0, len(contours)):
x, y, w, h = cv2.boundingRect(contours[i])
cv2.rectangle(yuantu_show, (x, y), (x + w, y + h), (255, 255, 0), 2)
#图片显示
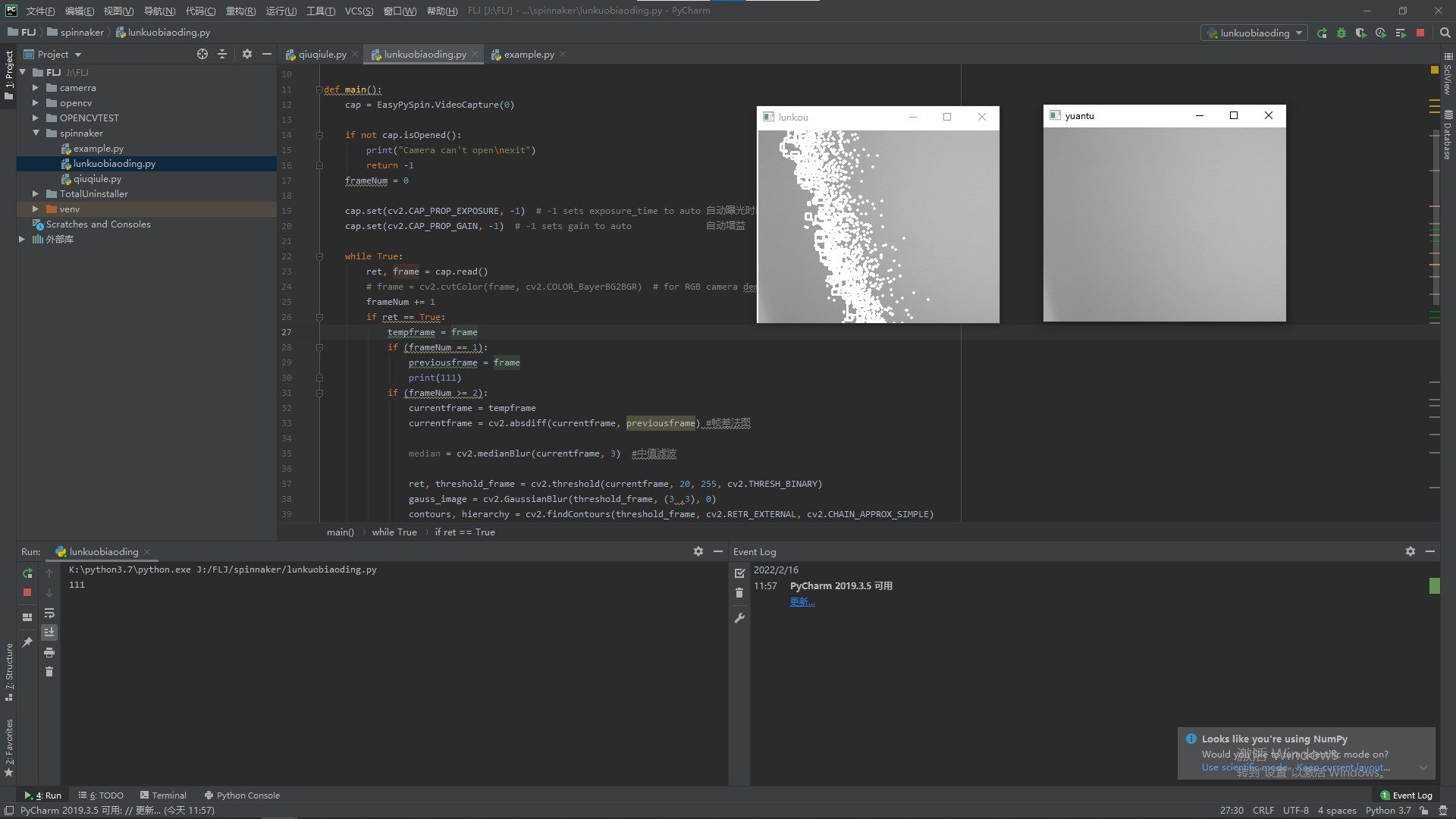
cv2.imshow('yuantu', intital_show)
cv2.imshow('lunkou', yuantu_show) # 原图显示
#cv2.imshow('tuxiangchuli', img_show) # 经过高斯滤波之后
#cv2.imshow('lvbo', median)
#时间延迟
key = cv2.waitKey(30)
#按q退出
if key == ord("q"):
break
#释放内存
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()利用帧差法进行视频的图像处理
最后
以上就是魁梧纸鹤最近收集整理的关于[POINTGREY]工业相机——基于python,opencv,spinnaker的开发1.Spinnaker SDK2.Pycharm+Python的环境(可自行配置)3.EasyPySpin库4.PySpin5.运行Example程序的全部内容,更多相关[POINTGREY]工业相机——基于python,opencv,spinnaker的开发1.Spinnaker内容请搜索靠谱客的其他文章。




![[POINTGREY]工业相机——基于python,opencv,spinnaker的开发1.Spinnaker SDK2.Pycharm+Python的环境(可自行配置)3.EasyPySpin库4.PySpin5.运行Example程序](https://www.shuijiaxian.com/files_image/reation/bcimg6.png)



发表评论 取消回复