同步RS触发器存在“空翻”现象,即触发器存在多次翻转的现象,空翻破坏了“时序电路按时钟节拍工作,每个时钟脉冲作用下电路的状态只发生一次转换”的基本原则
解决方法:将电平触发改为边沿触发,使得触发器旨在时钟脉冲的上升沿或下降沿响应激励信号
D触发器
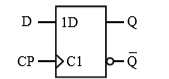
特点:
1.触发器的时钟是CP,激励信号是D, 互补状态输出端是 Q 和
Q
‾
overline{Q}
Q
2.国标符号的
Q
‾
overline{Q}
Q时反向输出的标志
3.不论触发器原状态如何,触发器的新状态总与时钟脉冲上升沿到来时 D 的输入值相
同。上升沿触发特性体现为,触发器的次态只与时钟脉冲上升沿到来时的激励信号取值有关, 而与激励信号其他时刻的取值无关
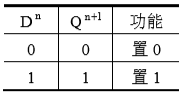
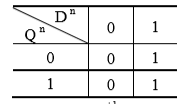
D触发器的次态方程为: Qn+1=Dn
JK触发器
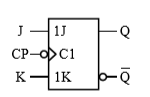
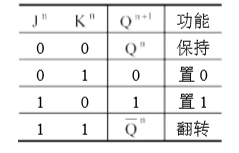
特点:
- 触发器有 两个激励信号 J 和 K,时钟端小圆圈表示下降沿触发。
- 在集成触发器中,JK 触发器的逻辑功能最丰富,在激励信号作用下, 可以实现置 1(置位)、置 0(复位)、保持(状态不变)和翻转 (状态翻转)操作。
次态方程:
Qn+1 = Jn Q ‾ overline{Q} Qn + K ‾ overline{K} KnQn
T触发器
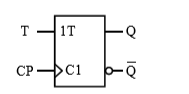
次态方程:

异步置位与异步复位
由于触发器的双稳态特性,加电后,集成触发器随机处于稳定状态 0 或 1。应用触发器
时,通常应处于特定的起始状态;另外,时序电路在工作中也时常需要触发器脱离时钟控制,异步(指不在同步时钟控制下)跳转到某个特定状态。为了便于将触发器置于所需状态,集 成触发器设置了优先级高于同步时钟的异步置位端
P
R
‾
overline{PR}
PR和异步复位端
C
L
R
‾
overline{CLR}
CLR,,异步置位与复位信号不允许同时有效。
以JK触发器来举例子
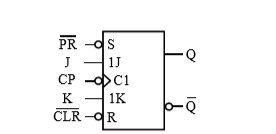
1.开始时, C L R ‾ overline{CLR} CLR=0, P R ‾ overline{PR} PR=1,触发器立即异步复位
2.Q=0与时钟无关的异步复位可实现触发器初状态为0
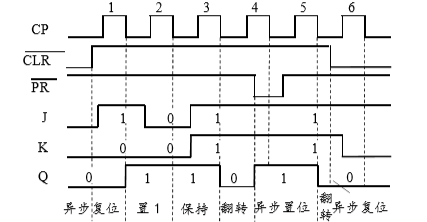
看的时候先看第一行CP(时钟)
第 1 个时钟脉冲作用前,异步控制信号已经都为 1,控制权交给了时钟,第 1 个时钟脉冲下降沿到来时,JK=10,由 JK 触发器真值表可知,触发器置 1(Q 端变为高电平
第二个时钟下降沿作用,JK=00,状态保持不变;
第三个脉冲作用时,JK=11,触发器状态翻转
第四个脉冲作用时, P R ‾ overline{PR} PR还在起作用,所以该时刻时钟脉冲不起作用(异步控制优先级高的体现)
第五个时钟脉冲下降沿起作用,触发器状态翻转为0
最后 C L R ‾ overline{CLR} CLR=0,此时触发器状态已经是0,异步复位的效果的看不到,第六个时钟下降沿来到时,异步复位信号仍作用,触发器状态保持为0
最后
以上就是高高期待最近收集整理的关于几种常见的集成触发器(D、T、JK)的全部内容,更多相关几种常见内容请搜索靠谱客的其他文章。








发表评论 取消回复