一、机械臂URDF-matlab/simulink-运动控制-正逆解
1、添加urdf文件的路径
2.1、在matlab建模:
clear,clc;
UR3=importrobot(‘ur3.urdf’); %%导入urdf文件
showdetails(UR3) %显示连杆之间的关系
show(UR3,‘Frames’,‘on’)%figure显示
2.2、在simulink建模:
clear,clc;
UR3=smimport(‘ur3.urdf’);
PS:没有.stl文件最后显示的知识坐标,没有模型
2.3在simulink上建模后,修改每个关节的输入输出
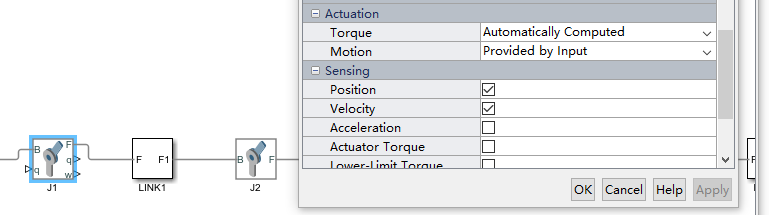
q口和w口就是前面设定的Sensing传感器中Position和Velocity口
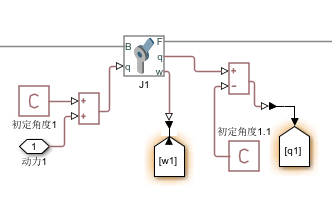
2.3添加模块
Goto”模块,在simulink-signal routing库
connection port模块,在RFBlockset-equivalent baseband-I/Oports库
PS ADD,PS Subtract模块,在Simscape-Physical signals-functions库
PS constant模块,在Simscape-Physical signals-sources库
数字信号转成物理信号的PS-Simulink convertor模块,红线是物理信号,黑线是数字信号
最后搭建如下图:
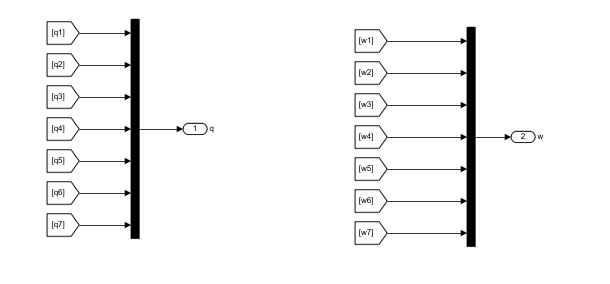
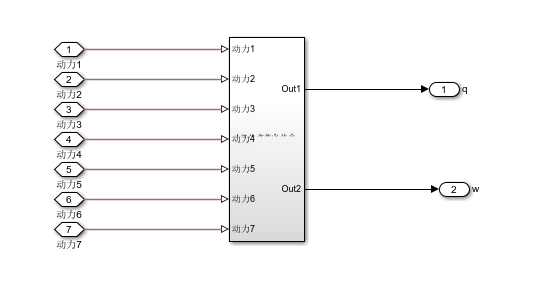
2.4将输出的数字信号整合,然后将模块全选利用ctrl+g进行封装
封装:
二、urdf与xacro
XACRO文件和URDF实质上是等价的. XACRO格式提供了一些更高级的方式来组织编辑机器人描述. 主要提供了三种方式来使得整个描述文件变得简单.导入xacro格式时也是先将其解析为urdf).
最后
以上就是英俊发卡最近收集整理的关于机械臂simulink仿真笔记的全部内容,更多相关机械臂simulink仿真笔记内容请搜索靠谱客的其他文章。








发表评论 取消回复