本文完全参考这个链接,并进行傻瓜式补充
ROSbots/rosbots_setup_toolsgithub.com
本文img镜像烧录文件来自这个连接,由于百度云非会员,传文件算是放弃了,需要英语三级以上水平,填完作者问卷后即可获得下载连接。(哪位仁兄有可以私聊我上传下,嘿嘿嘿)
https://medium.com/@rosbots/ready-to-use-image-raspbiawen-stretch-ros-opencv-324d6f8dcd96medium.com采用的烧录工具为 Win32DiskImager
其他软件有 Advanced IP Scanner
VNC-viewer(如果需要安装图形桌面)
以及 Win10下安装linux子系统
(简单流程就是:进入全局设置 搜索系统更新 选择开启开发者模式
进入控制面板 》程序 》启动或关闭程序》适用于win10的linux子系统
进入win应用商店 搜索ubuntu 选择自己喜欢版本下载
打开 建立账户 输入密码(用户名不能大写))
图形界面安装就不在这里说了。能打开终端就算可以往下了。
材料:一根网线,大于等于16G的tf卡
为了方便,建议手机开热点给笔记本连接,后面有讲为什么
step1:
下载完解压,获得

选择9.3G的这个集成包
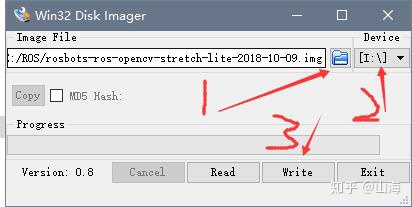
step2:
开始选img文件跟烧录目录,注意2的盘符是你tf卡的盘符,第一次搞错了会导致其他的U盘被强制格式化
step3:
插tf入树莓派3B+
网线与pc跟3B+相连
step4:
打开pc wifi设置


选择属性
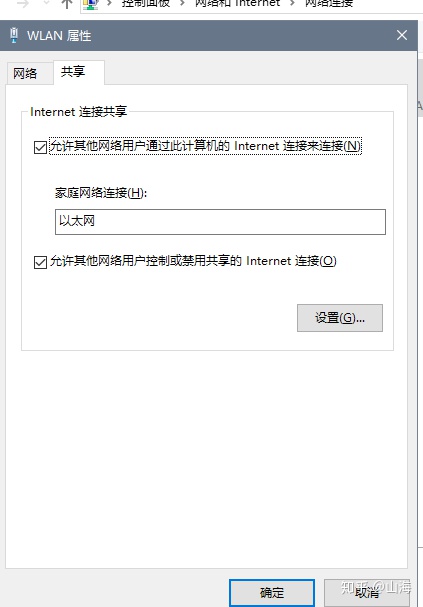
点击共享 按图所示,选择以太网 也就是网线共享
step5:
pc 输入 win+r 输入 cmd 回车 ipconfig 回车
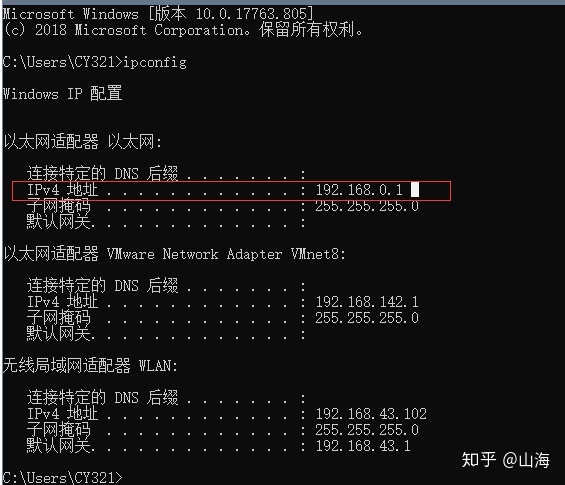
step6:
打开 Advanced IP Scanner
setting》language》中文。。。
它搜集了一遍可以搜的ip段落,点击绿色Scan 开始扫描
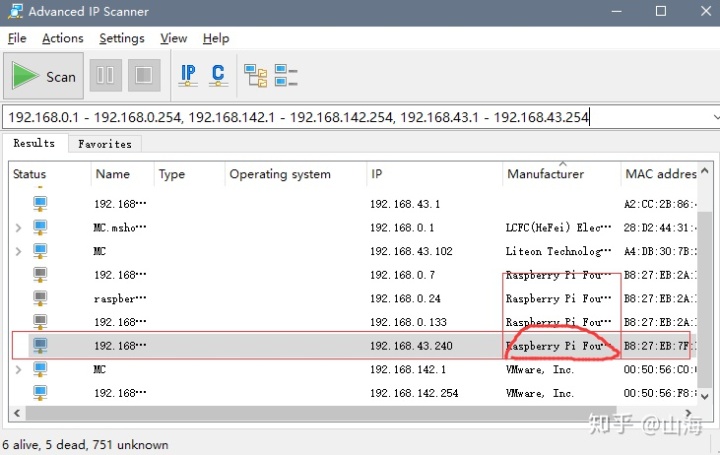
图中 name= raspberry 且manufactuer 的即为 我们马上要ssh通信的地址
附注:对于mac或者linux用户,官方解答是这样:On a Mac or Linux system, that's easily discoverable via "sudo nmap -sP x.x.x.0/24" where you replace x.x.x.0 with your network subnet
step 7 打开 win下的ubuntu终端
输入 ssh pi@扫描出的地址 enter
密码 rosbots! 注意有个感叹号 enter
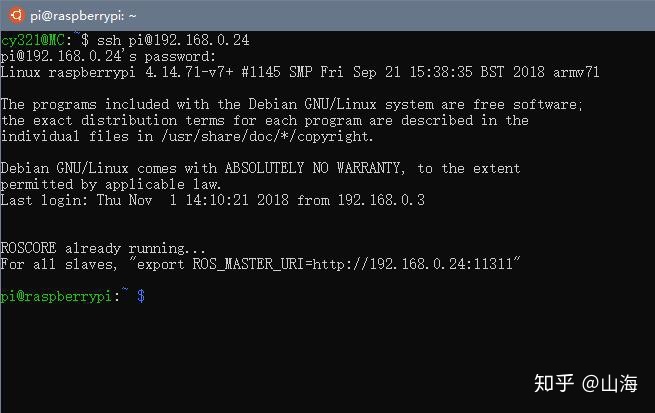
可以看到成功进入了,不要急,因为不可能每次都那根网线这样连
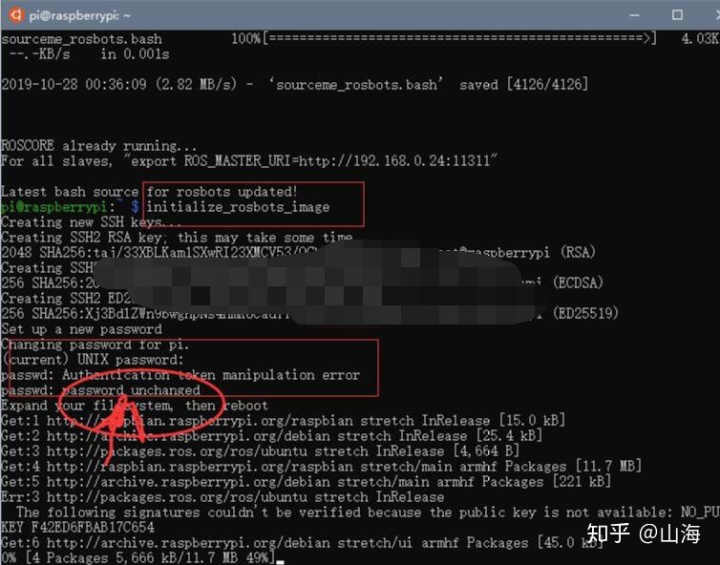
输入 update_rosbots_git_repos 然后enter 等待片刻
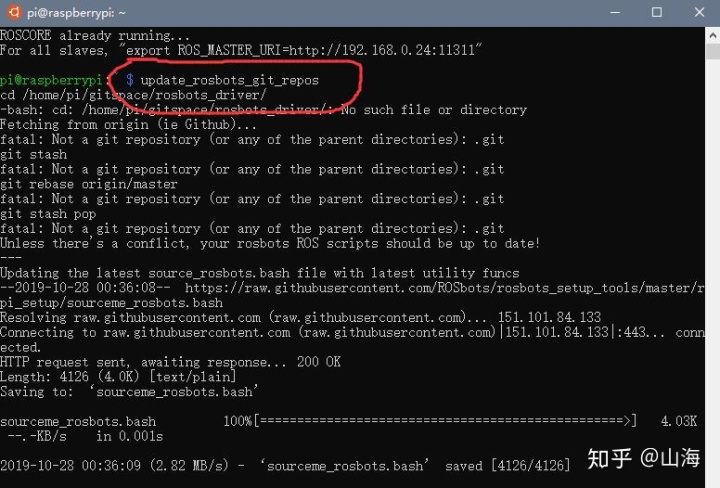
输入 initialize_rosbots_image 然后 enter
提示你输入旧密码,也就是 rosbots! 建议输入任意密码确定进行无效化跳过
官方的对这两个命令的解释:
- update_rosbots_git_repos
- This will retrieve our latest setup routines
- initialize_rosbots_image
- This will:
- Set up new SSH keys
- Ask you for a new password
- Run raspi-config where you should enable your Pi Camera and expand your filesystem to use entire SD card space.
- Select Interfacing Options -> Camera -> Enable
- Select Advanced Options -> Expand Filesystems
- Finish and Reboot
- This will:
如果你是用来做智能小车的,还是别急着开摄像头elect Interfacing Options -> Camera -> Enable,全部验证完最后再测试 Enable。
step 8:
然后我们会快乐地自动进入 树莓派的config 设置界面
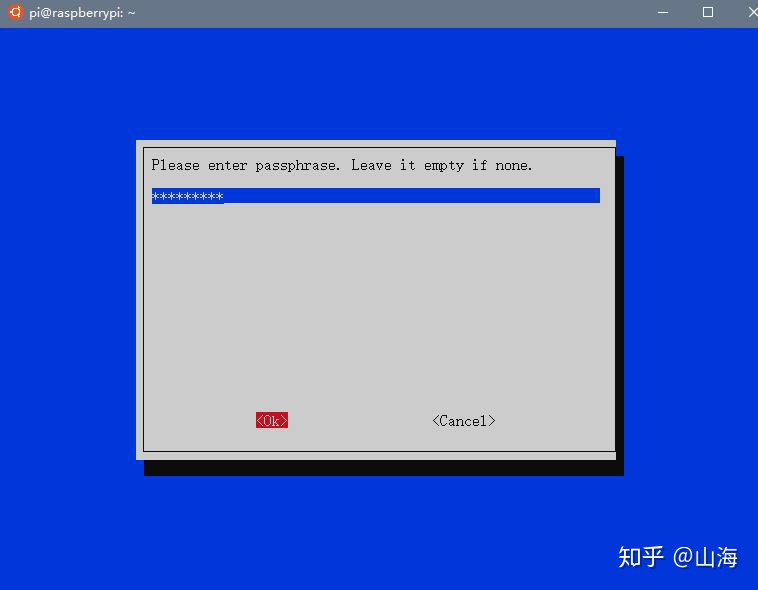
选择2 进行手机wifi的定义
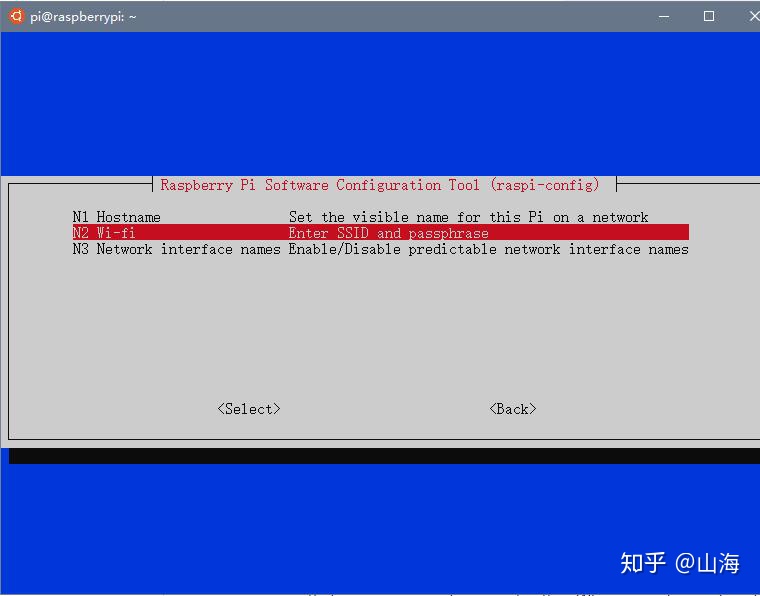

然后再输入完密码 enter 左右键选择退出
这里设置完,打开手机,就可以看到树莓派已经连进来了
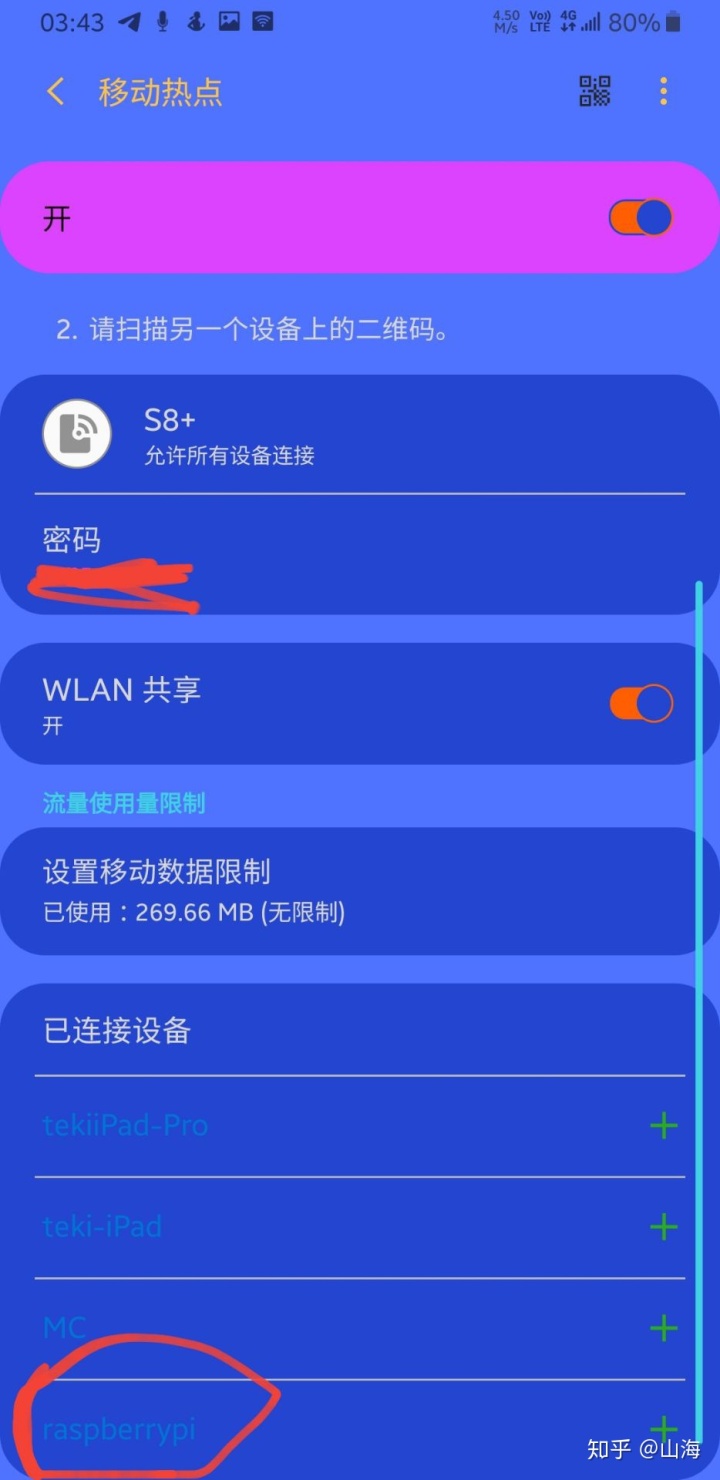
点击raspberry 就可以看到它的ip地址,以后需要连接树莓派
手机开热点 树莓派自动连,连手机热点的电脑直接ssh通信这个地址,(也可以手机里下个终端,直接用手机连,当然,用手机传文件太累,没什么较好体验)
step 9
自动跳出来后选择4
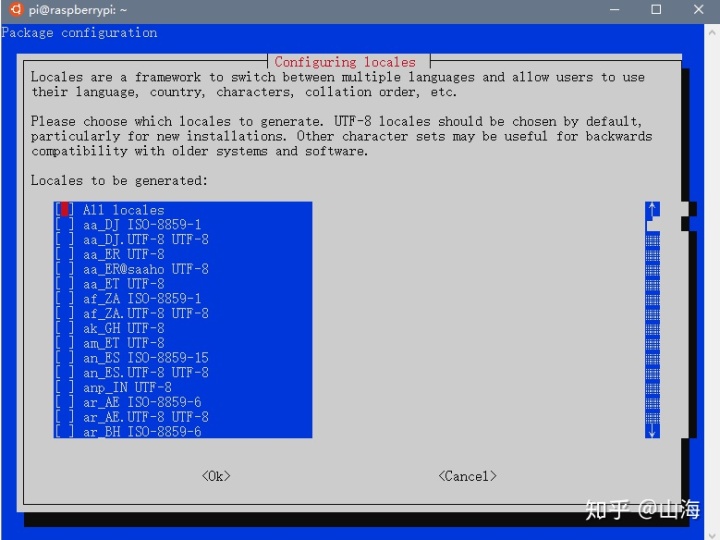
翻到最底下 选择zh CN utf8
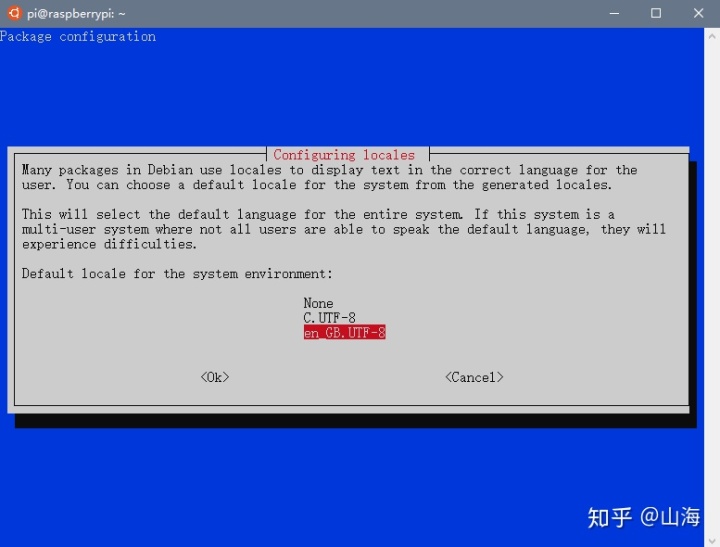
看描述 这里选C就是中文系统了,我感觉en也差不多,就选择en
然后里面时区,默认键盘之类看个人选择了,如果之前选了en,建议吧wifi country 这个设置翻到最底下选US
step 10
选择 5 enter
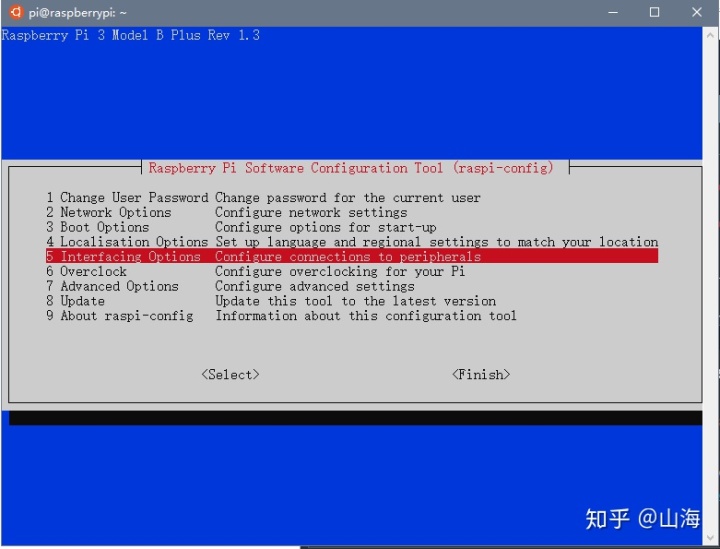
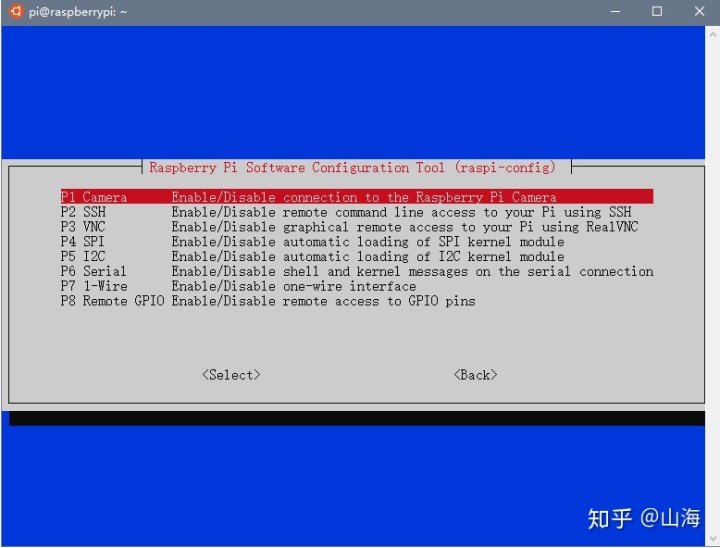
在你没搞清楚各个选项的影响前,只建议选择2,3进行enable
选择3后 以后可以使用VNC 连接图形操作界面,包里不带,需要你自行安装
等待安装结束 enter 退出
step 11:
(6是超频,有兴趣可以改改,只是主频从700Mhz超到了800Mhz,意义不怎么大)
选择选项7
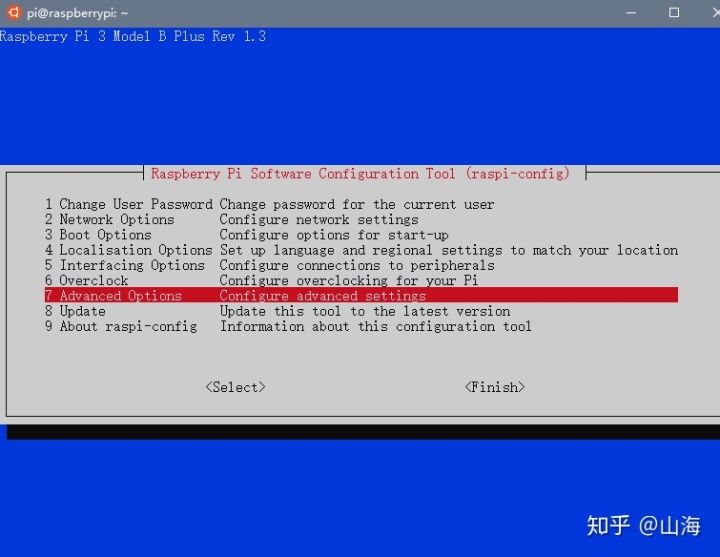
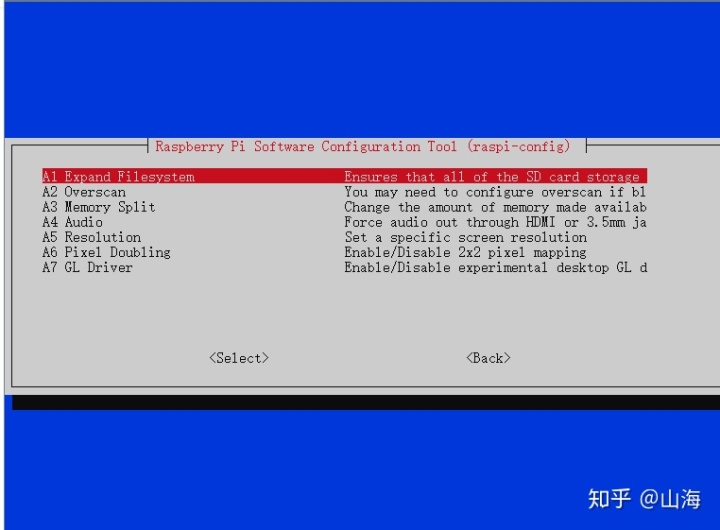
enter, 解释下,作者之前就提过这样做,这样做是为了将剩余所有未定义空间利用起来,不这样做也可以正常运行,但是会导致apt-get指令下载文件时提示空间不足。
重启后生效
建议读读这个连接
https://wiki.jikexueyuan.com/project/raspberry-pi/rasp-config.html
step12:
重启树莓派与终端
使用连接手机热点的ip ssh连接
如果出现提示
IT IS POSSIBLE THAT SOMEONE IS DOING SOMETHING NASTY!
Someone could be eavesdropping on you right now (man-in-the-middle attack)!
It is also possible that a host key has just been changed.XXXXXXXXXXX
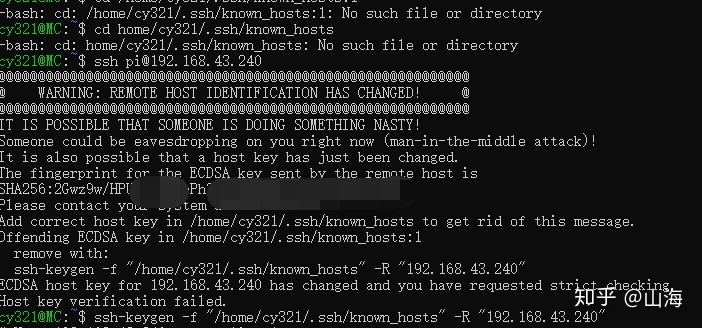
错误
不要慌
先看提示复制代码清理
ssh-keygen -f "/home/cy321/.ssh/known_hosts" -R "IP ""每个人这里不一样" 我的是这样
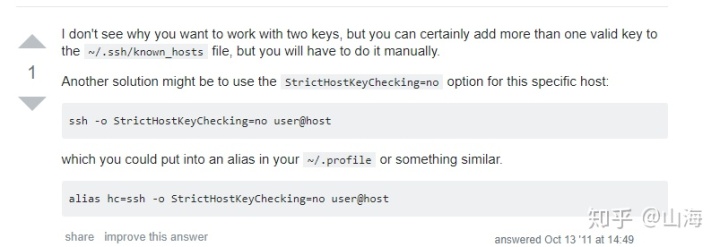
然后
ssh -o StrictHostKeyChecking=no pi@ip地址 再连一次即可
方法源自
https://serverfault.com/questions/321167/add-correct-host-key-in-known-hosts-multiple-ssh-host-keys-per-hostname
step13:
重新登进去输入
rosnode list
你应该可以看见rosout
setup_rosbots_code
输入密码,等待终端跳会儿
原文建议等待时间喝杯咖啡
If you are using a ROSbots robot, complete the ROSbots software setup. From an ssh terminal into your RPi, type:
- setup_rosbots_code
- After setting up some other packages (about 30 seconds), it'll ask you for your RPi password. Once you finished that, you can go grab a cup of coffee. When you return, setup should be complete.
- When complete, type - rosnode list
- You should see /rosout and /uno_serial_node outputted
教程就到这里结束了
PS : 如果喜欢折腾,那么就再搞个桌面
照搬作者文章第4部分
Raspbian Lite Guide GUI 树莓派安装桌面。blog.csdn.net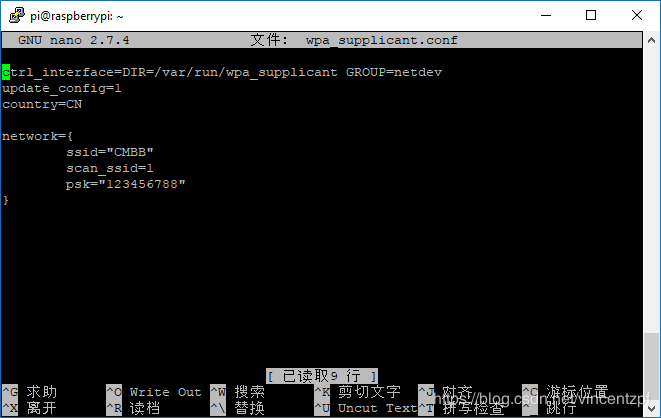
安装桌面在终sudo以下命令
sudo apt-get install --no-install-recommends xserver-xorg
sudo apt-get install --no-install-recommends xinit
sudo apt-get install lxde-core lxappearance
sudo apt-get install lightdm
startx
一步一步sudo过来 就ojbk了
最后startx如果出错没关系,可以VNC 输入ip打开,已经可以看到树莓派的远程桌面了
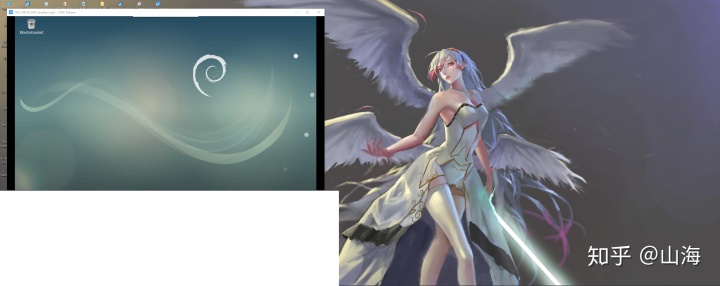
好了,就到此结束了。
最后
以上就是结实花卷最近收集整理的关于利用rfcomm实现树莓派与手机通信_树莓派 3B+无显示器 安装stretch系统集成ROS kinetic +OpenCV...的全部内容,更多相关利用rfcomm实现树莓派与手机通信_树莓派内容请搜索靠谱客的其他文章。








发表评论 取消回复