网上可以买到很多高速摄像头模块,常见的就是这个ov2710模组,采用uvc免驱,号称在1080p 30fps,720p 60fps以及VGA 120fps。
值得是注意的是,这些高速模式都是在MJPG模式下运行,获取的并非标准的非压缩RGB图像。采用标准的opencv读取方式,如cvGrabFrame()+cvQueryFrame()或者VideoCapture::grab()+VideoCapture::retrieve()等,即使是在VGA分别率下也仅能获得30fps的数据。因此为了获得高速图像,就需要采用v4l2的库进行图像读取。
为了避免从头学起,推荐使用下面的ROS下的uvc摄像头读取程序,十分简单易用。
https://github.com/toNeptune9/Uvc_camera
下载后,将文件放到ROS的工作空间中,一般为~/catkin_ws/src/。
然后在工作空间的根目录下(~/catkin_ws)进行编译:
catkin_make
编译成功后,进入uvc_camera的launch目录下,对example.launch文件进行编辑:
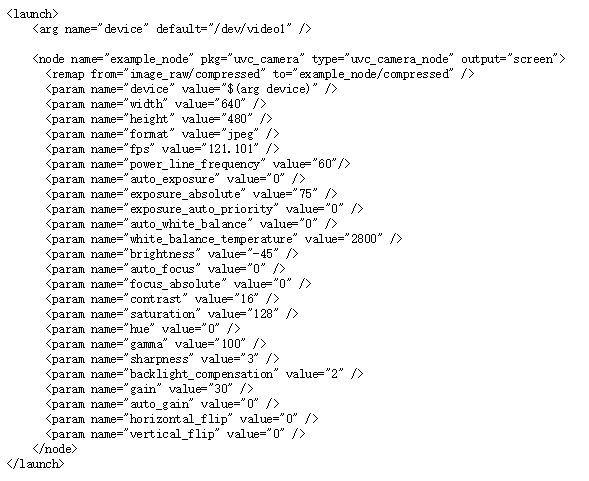
在这里可以看到,这个launch文档的默认模式就是VGA 120fps,并且将图像发布到了example_node/compressed这个主题中,所以可以直接启动:
roslaunch uvc_camera example.launch
再用rostopic命令看一下example_node/compressed这个主题的数据刷新率,应该是99fps左右。
通过调节其他参数可以发现,改变曝光时间exposure_absolute可以影响刷新率,但99fps已经是能够运行的最快的刷新率了,增大exposure_absolute将导致刷新率降低,但是减小exposure_absolute已经不会提升刷新率了。
有一点需要注意,uvc_camera采用的是ROS中最常用的image_transport实现图像的传输,这个包可以发布三种不同的主题类型:
【1】sensor_msgs::image 用于非压缩的RGB图像传输
【2】sensor_msgs::compressedimage 用于JPEG或PNG格式的压缩图像的传输
【3】theora_image_transport/Packet 用于采用theora codec压缩的视频图像传输
上面的提到的uvc_camera包支持普通RGB图像、MJPG图像和YUV图像,而高速传输仅支持MJPG图像,所以这里为了获得高速图像,只能采用compressedimage格式。
然而有时为了处理图像,我么有需要把压缩后的图像还原成普通RGB图像。
下面提供了两种方法:
【1】第一种方法是直接在callback函数里使用cv::imdecode(cv::Mat(msg->data),1),这样就可以转换成cv::Mat格式的图像了。这种方法适用于尽在一个包里对图像进行处理。
【2】第二种方法采用的是republish这个包,这一方法可以一次为多个包提供数据转换:
republish compressed in:=/image_raw raw out:=/cam/image_raw对于第二种方法,在launch文件中则可如下写:(编辑器的原因最开始的<和最后的/>被省略)
node name="republish0" type="republish" pkg="image_transport" output="screen" args="compressed in:=/image_raw raw out:=/cam/image_raw" 对于双目应用,则可以通过改变node name,启动多个包,如下:
node name="republish0" type="republish" pkg="image_transport" output="screen" args="compressed in:=/left/camera raw out:=/left/camera/image_raw" node name="republish0" type="republish" pkg="image_transport" output="screen" args="compressed in:=/left/camera raw out:=/left/camera/image_raw" 最后
以上就是自由蚂蚁最近收集整理的关于ROS下UVC免驱高速摄像头图像读取以及利用image_transport进行图像传递的全部内容,更多相关ROS下UVC免驱高速摄像头图像读取以及利用image_transport进行图像传递内容请搜索靠谱客的其他文章。








发表评论 取消回复