何时启动的SensorService
当然是SensorService启动后才能得到Sensor信息,Sensor信息的建立是在实例化SensorService得到的.
frameworks/base/services/java/com/android/server/SystemServer.java
/**
* Starts the small tangle of critical services that are needed to get the system off the
* ground. These services have complex mutual dependencies which is why we initialize them all
* in one place here. Unless your service is also entwined in these dependencies, it should be
* initialized in one of the other functions.
*/
private void startBootstrapServices() {
// The sensor service needs access to package manager service, app ops
// service, and permissions service, therefore we start it after them.
// Start sensor service in a separate thread. Completion should be checked
// before using it.
mSensorServiceStart = SystemServerInitThreadPool.get().submit(() -> {
TimingsTraceLog traceLog = new TimingsTraceLog(
SYSTEM_SERVER_TIMING_ASYNC_TAG, Trace.TRACE_TAG_SYSTEM_SERVER);
traceLog.traceBegin(START_SENSOR_SERVICE);
startSensorService();
traceLog.traceEnd();
}, START_SENSOR_SERVICE);
}
/*
* JNI registration.
*/
static const JNINativeMethod gMethods[] = {
/* name, signature, funcPtr */
//这边先将该接口注册,后面给system_server调用
{ "startSensorService", "()V", (void*) android_server_SystemServer_startSensorService }
{ "startHidlServices", "()V", (void*) android_server_SystemServer_startHidlServices },
};
//在这儿创建sensorservice
static void android_server_SystemServer_startSensorService(JNIEnv* /* env */, jobject /* clazz */) {
char propBuf[PROPERTY_VALUE_MAX];
property_get("system_init.startsensorservice", propBuf, "1");
if (strcmp(propBuf, "1") == 0) {
SensorService::instantiate();
}
}
SensorService的实例化
sensorservice实例化后 得到sensor infor
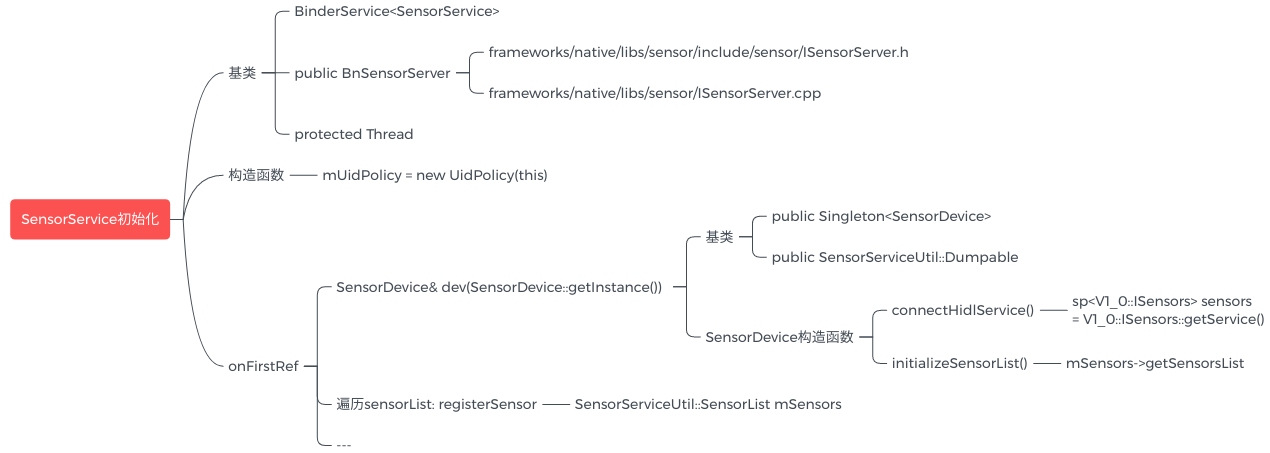
SensorDevice初始化的重要一步是创建SensorDevice对象,另外要注意SensorService 和SensorDevice里都有数据成员mSensors但两者的数据类型不同(看上图)
SensorDevice
SensorDevice的基类
class SensorDevice : public Singleton<SensorDevice>,
public SensorServiceUtil::Dumpable {
}
include/utils/Singleton.h
template <typename TYPE>
class ANDROID_API Singleton
{
public:
static TYPE& getInstance() {
Mutex::Autolock _l(sLock);
TYPE* instance = sInstance;
if (instance == nullptr) {
instance = new TYPE();
sInstance = instance;
}
return *instance;
}
static bool hasInstance() {
Mutex::Autolock _l(sLock);
return sInstance != nullptr;
}
protected:
~Singleton() { }
Singleton() { }
private:
Singleton(const Singleton&);
Singleton& operator = (const Singleton&);
static Mutex sLock;
static TYPE* sInstance;
};
namespace SensorServiceUtil {
class Dumpable {
public:
virtual std::string dump() const = 0;
virtual void setFormat(std::string ) {}
virtual ~Dumpable() {}
};
size_t eventSizeBySensorType(int type);
} // namespace SensorServiceUtil
访问hidl service的接口mSensors
/*
* The ISensorsWrapper interface includes all function from supported Sensors HAL versions. This
* allows for the SensorDevice to use the ISensorsWrapper interface to interact with the Sensors
* HAL regardless of the current version of the Sensors HAL that is loaded. Each concrete
* instantiation of ISensorsWrapper must correspond to a specific Sensors HAL version. This design
* is beneficial because only the functions that change between Sensors HAL versions must be newly
* newly implemented, any previously implemented function that does not change may remain the same.
*
* Functions that exist across all versions of the Sensors HAL should be implemented as pure
* virtual functions which forces the concrete instantiations to implement the functions.
*
* Functions that do not exist across all versions of the Sensors HAL should include a default
* implementation that generates an error if called. The default implementation should never
* be called and must be overridden by Sensors HAL versions that support the function.
*/
class ISensorsWrapper : public VirtualLightRefBase {}
template<typename T>
class SensorsWrapperBase : public ISensorsWrapper {}
class SensorsWrapperV1_0 : public SensorsWrapperBase<hardware::sensors::V1_0::ISensors> {
public:
SensorsWrapperV1_0(sp<hardware::sensors::V1_0::ISensors> sensors) :
SensorsWrapperBase(sensors) { };
}
sp<SensorServiceUtil::ISensorsWrapper> mSensors;
SensorDevice::HalConnectionStatus SensorDevice::connectHidlServiceV1_0() {
sp<V1_0::ISensors> sensors = V1_0::ISensors::getService();
mSensors = new SensorServiceUtil::SensorsWrapperV1_0(sensors); //创建了hidl ISensor class的wapper class
}
initializeSensorList
void SensorDevice::initializeSensorList() {
float minPowerMa = 0.001; // 1 microAmp
checkReturn(mSensors->getSensorsList(
[&](const auto &list) {
const size_t count = list.size();
//list的数据类型是?
mActivationCount.setCapacity(count);
Info model;
for (size_t i=0 ; i < count; i++) {
sensor_t sensor;
convertToSensor(list[i], &sensor);
// Sanity check and clamp power if it is 0 (or close)
if (sensor.power < minPowerMa) {
ALOGI("Reported power %f not deemed sane, clamping to %f",
sensor.power, minPowerMa);
sensor.power = minPowerMa;
}
//Vector<sensor_t> mSensorList;
mSensorList.push_back(sensor);
//DefaultKeyedVector<int, Info> mActivationCount;
mActivationCount.add(list[i].sensorHandle, model);
checkReturn(mSensors->activate(list[i].sensorHandle, 0 /* enabled */));
}
}));
}
通过mSensors作为client访问hidl service
getSensorsList函数的参数直接赋值导致上面的函数很长,几乎掩盖了下面的事实:获得sensor list, 然后又使用callback 函数处理了下list
Return<void> Sensors::getSensorsList(getSensorsList_cb _hidl_cb) {
sensor_t const *list;
size_t count = mSensorModule->get_sensors_list(mSensorModule, &list);
hidl_vec<SensorInfo> out;
out.resize(count);
for (size_t i = 0; i < count; ++i) {
const sensor_t *src = &list[i];
SensorInfo *dst = &out[i];
convertFromSensor(*src, dst);
}
_hidl_cb(out);
return Void();
}
来着hidl的sensorInfo和sensorService的sensor_t转换
hardware/interfaces/sensors/1.0/default/include/sensors/convert.h
void convertToSensor(const SensorInfo &src, sensor_t *dst);
//通过hidl得到是SensorInfo 转换成sensorservice里需要的sensor_t
hardware/libhardware/include/hardware/sensors.h
sensor_t
hardware/interfaces/sensors/1.0/types.hal: SensorInfo
Java层用的type也是通过Hidl规定的如accel = 1, 怎么写到sensorInfo的呢?
void convertToSensor(
const ::android::hardware::sensors::V1_0::SensorInfo &src,
sensor_t *dst) {
dst->name = strdup(src.name.c_str());
dst->vendor = strdup(src.vendor.c_str());
dst->version = src.version;
dst->handle = src.sensorHandle;
dst->type = (int)src.type;
dst->maxRange = src.maxRange;
dst->resolution = src.resolution;
dst->power = src.power;
dst->minDelay = src.minDelay;
dst->fifoReservedEventCount = src.fifoReservedEventCount;
dst->fifoMaxEventCount = src.fifoMaxEventCount;
dst->stringType = strdup(src.typeAsString.c_str());
dst->requiredPermission = strdup(src.requiredPermission.c_str());
dst->maxDelay = src.maxDelay;
dst->flags = src.flags;
dst->reserved[0] = dst->reserved[1] = 0;
}
struct Info 跟踪多个Client对sensor的设置
//这个结构体用了跟踪多个Client对sensor的设置
// Store batch parameters in the KeyedVector and the optimal batch_rate and timeout in
// bestBatchParams. For every batch() call corresponding params are stored in batchParams
// vector. A continuous mode request is batch(... timeout=0 ..) followed by activate(). A batch
// mode request is batch(... timeout > 0 ...) followed by activate().
// Info is a per-sensor data structure which contains the batch parameters for each client that
// has registered for this sensor.
struct Info {
BatchParams bestBatchParams;
// Key is the unique identifier(ident) for each client, value is the batch parameters
// requested by the client.
KeyedVector<void*, BatchParams> batchParams;
// Flag to track if the sensor is active
bool isActive = false;
// Sets batch parameters for this ident. Returns error if this ident is not already present
// in the KeyedVector above.
status_t setBatchParamsForIdent(void* ident, int flags, int64_t samplingPeriodNs,
int64_t maxBatchReportLatencyNs);
// Finds the optimal parameters for batching and stores them in bestBatchParams variable.
void selectBatchParams();
// Removes batchParams for an ident and re-computes bestBatchParams. Returns the index of
// the removed ident. If index >=0, ident is present and successfully removed.
ssize_t removeBatchParamsForIdent(void* ident);
int numActiveClients() const;
};
到此,在sensor service初始化时已经得到了 sensorlist.
何时创建的SensorService的Client:SystemSensorService
创建SystemSensorService后得到了sensorService的client,可以使用sensorService的服务CREATE_SENSOR_EVENT_CONNECTION在registerListener时创建event connection去配置Sensor的采样率、去得到SensorEvent.
frameworks/base/core/java/android/app/SystemServiceRegistry.java
/**
* Manages all of the system services that can be returned by {@link Context#getSystemService}.
* Used by {@link ContextImpl}.
*/
public static final String SENSOR_SERVICE = "sensor";
registerService(Context.SENSOR_SERVICE, SensorManager.class,
new CachedServiceFetcher<SensorManager>() {
@Override
public SensorManager createService(ContextImpl ctx) {
return new SystemSensorManager(ctx.getOuterContext(),
ctx.mMainThread.getHandler().getLooper());
}});
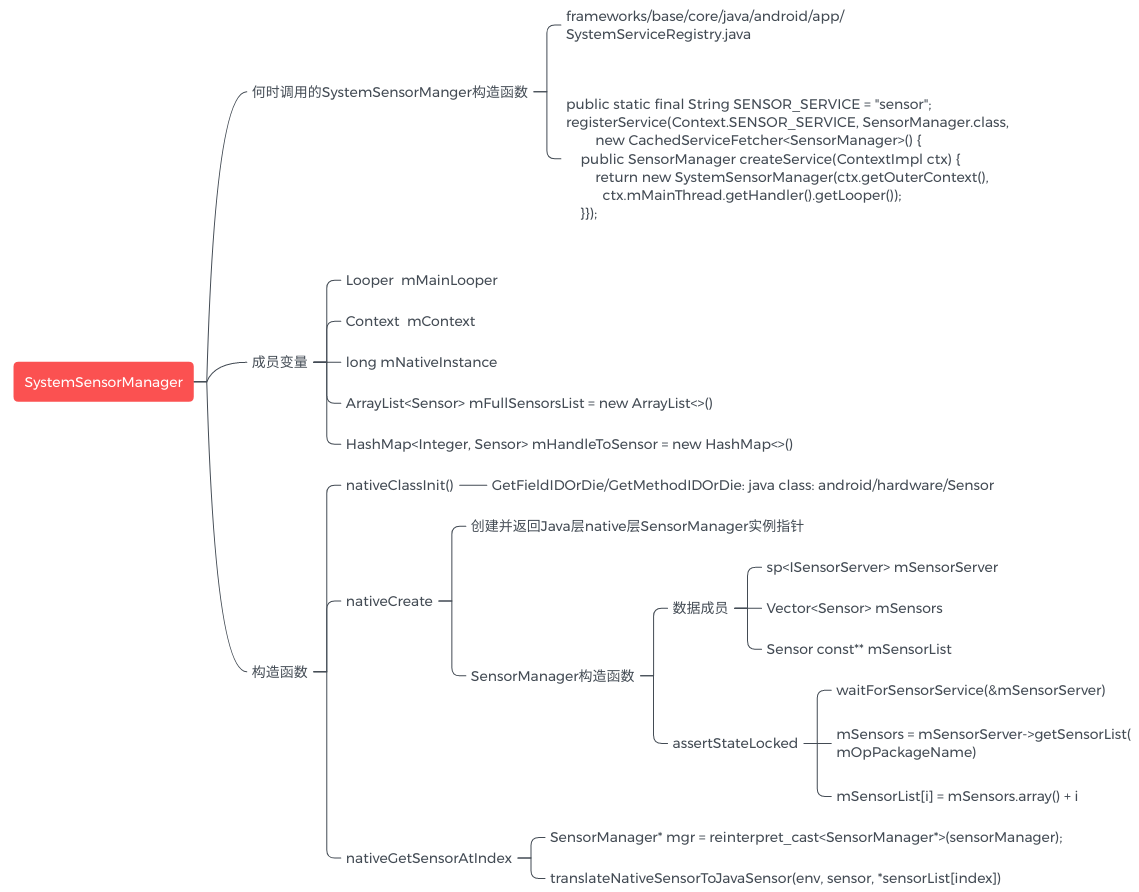
创建SensorManager
创建完SensorManger后Native创建了Sensors也赋值到Java层,之后APP可以获得已经生成的mSensorManager,通过Type得到Sensor. 已得到Sensor为参数调用registerListener创建SensorEventQueue得到SensorEvent.
mSensorManager = (SensorManager)getSystemService(SENSOR_SERVICE)
mAccelerometer = mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
mSensorManager.registerListener(this, mAccelerometer, SensorManager.SENSOR_DELAY_NORMAL)
public SystemSensorManager(Context context, Looper mainLooper) {
synchronized (sLock) {
if (!isNativeClassInited) {
sNativeClassInited = true;
nativeClassInit();
}
}
mMainLooper = mainLooper;
mTargetSdkLevel = context.getApplicationInfo().targetSdkVersion;
mContext = context;
mNativeInstance = nativeCreate(context.getOpPackageName());
// initialize the sensor list
for (int index = 0;; ++index) {
Sensor sensor = new Sensor();
if (!nativeGetSensorAtIndex(mNativeInstance, sensor, index)) break;
mFullSensorsList.add(sensor);
mHandleToSensor.put(sensor.getHandle(), sensor);
}
}
nativeClassInit
SensorOffsets
struct SensorOffsets
{
jclass clazz;
//fields
jfieldID name;
jfieldID vendor;
jfieldID version;
jfieldID handle;
jfieldID range;
jfieldID resolution;
jfieldID power;
jfieldID minDelay;
jfieldID fifoReservedEventCount;
jfieldID fifoMaxEventCount;
jfieldID stringType;
jfieldID requiredPermission;
jfieldID maxDelay;
jfieldID flags;
//methods
jmethodID setType;
jmethodID setUuid;
jmethodID init;
} gSensorOffsets;
nativeClassInit
static void
nativeClassInit (JNIEnv *_env, jclass _this)
{
//android.hardware.Sensor(Sensor.java类)
//C++引用对象,改变对象的内容,为native/java传递数据提供方便
SensorOffsets& sensorOffsets = gSensorOffsets;
jclass sensorClass = (jclass)
MakeGlobalRefOrDie(_env, FindClassOrDie(_env, "android/hardware/Sensor"));
sensorOffsets.clazz = sensorClass;
sensorOffsets.name = GetFieldIDOrDie(_env, sensorClass, "mName", "Ljava/lang/String;");
sensorOffsets.vendor = GetFieldIDOrDie(_env, sensorClass, "mVendor", "Ljava/lang/String;");
sensorOffsets.version = GetFieldIDOrDie(_env, sensorClass, "mVersion", "I");
sensorOffsets.handle = GetFieldIDOrDie(_env, sensorClass, "mHandle", "I");
//------
sensorOffsets.setType = GetMethodIDOrDie(_env,sensorClass, "setType", "(I)Z");
sensorOffsets.setUuid = GetMethodIDOrDie(_env,sensorClass, "setUuid", "(JJ)V");
sensorOffsets.init = GetMethodIDOrDie(_env,sensorClass, "<init>", "()V");
}
nativeCreate
static jlong
nativeCreate
(JNIEnv *env, jclass clazz, jstring opPackageName)
{
ScopedUtfChars opPackageNameUtf(env, opPackageName);
return (jlong) &SensorManager::getInstanceForPackage(String16(opPackageNameUtf.c_str()));
}
SensorManager& SensorManager::getInstanceForPackage(const String16& packageName) {
waitForSensorService(nullptr);
SensorManager* sensorManager;
sensorManager = new SensorManager(opPackageName);
return *sensorManager;
}
SensorManager构造函数
//SensorManager 数据成员
/*
sp<ISensorServer> mSensorServer;
Sensor const** mSensorList;
Vector<Sensor> mSensors;
*/
SensorManager::SensorManager(const String16& opPackageName)
: mSensorList(nullptr), mOpPackageName(opPackageName), mDirectConnectionHandle(1) {
Mutex::Autolock _l(mLock);
assertStateLocked();
}
status_t SensorManager::assertStateLocked() {
{
waitForSensorService(&mSensorServer);
mSensors = mSensorServer->getSensorList(mOpPackageName);
size_t count = mSensors.size();
mSensorList =
static_cast<Sensor const**>(malloc(count * sizeof(Sensor*)));
LOG_ALWAYS_FATAL_IF(mSensorList == nullptr, "mSensorList NULL");
for (size_t i=0 ; i<count ; i++) {
mSensorList[i] = mSensors.array() + i;
}
}
return NO_ERROR;
}
nativeGetSensorAtIndex
static jboolean
nativeGetSensorAtIndex(JNIEnv *env, jclass clazz, jlong sensorManager, jobject sensor, jint index)
{
SensorManager* mgr = reinterpret_cast<SensorManager*>(sensorManager);
Sensor const* const* sensorList;
ssize_t count = mgr->getSensorList(&sensorList);
return translateNativeSensorToJavaSensor(env, sensor, *sensorList[index]) != NULL;
}
translateNativeSensorToJavaSensor
static jobject
translateNativeSensorToJavaSensor(JNIEnv *env, jobject sensor, const Sensor& nativeSensor) {
const SensorOffsets& sensorOffsets(gSensorOffsets);
if (sensor != NULL) {
jstring name = getJavaInternedString(env, nativeSensor.getName());
jstring vendor = getJavaInternedString(env, nativeSensor.getVendor());
jstring requiredPermission =
getJavaInternedString(env, nativeSensor.getRequiredPermission());
env->SetObjectField(sensor, sensorOffsets.name, name);
env->SetObjectField(sensor, sensorOffsets.vendor, vendor);
env->SetIntField(sensor, sensorOffsets.version, nativeSensor.getVersion());
env->SetIntField(sensor, sensorOffsets.handle, nativeSensor.getHandle());
env->SetFloatField(sensor, sensorOffsets.range, nativeSensor.getMaxValue());
env->SetFloatField(sensor, sensorOffsets.resolution, nativeSensor.getResolution());
env->SetFloatField(sensor, sensorOffsets.power, nativeSensor.getPowerUsage());
env->SetIntField(sensor, sensorOffsets.minDelay, nativeSensor.getMinDelay());
env->SetIntField(sensor, sensorOffsets.fifoReservedEventCount,
nativeSensor.getFifoReservedEventCount());
env->SetIntField(sensor, sensorOffsets.fifoMaxEventCount,
nativeSensor.getFifoMaxEventCount());
env->SetObjectField(sensor, sensorOffsets.requiredPermission,
requiredPermission);
env->SetIntField(sensor, sensorOffsets.maxDelay, nativeSensor.getMaxDelay());
env->SetIntField(sensor, sensorOffsets.flags, nativeSensor.getFlags());
//调用java层函数 boolean setType(int value)
if (env->CallBooleanMethod(sensor, sensorOffsets.setType, nativeSensor.getType())
== JNI_FALSE) {
jstring stringType = getJavaInternedString(env, nativeSensor.getStringType());
env->SetObjectField(sensor, sensorOffsets.stringType, stringType);
}
int64_t id = nativeSensor.getId();
env->CallVoidMethod(sensor, sensorOffsets.setUuid, id, 0);
}
return sensor;
}
怎样根据type找到Sensor
调用SystemSensorManager后得到所有的Sensor信息,可以通过type得到Sensor, type和Sensor的关联及handle和Sensor的关联等都是native层建立的。
public Sensor getDefaultSensor(int type) {
// TODO: need to be smarter, for now, just return the 1st sensor
List<Sensor> l = getSensorList(type);
boolean wakeUpSensor = false;
// For the following sensor types, return a wake-up sensor. These types are by default
// defined as wake-up sensors. For the rest of the SDK defined sensor types return a
// non_wake-up version.
if (type == Sensor.TYPE_PROXIMITY || type == Sensor.TYPE_SIGNIFICANT_MOTION
|| type == Sensor.TYPE_TILT_DETECTOR || type == Sensor.TYPE_WAKE_GESTURE
|| type == Sensor.TYPE_GLANCE_GESTURE || type == Sensor.TYPE_PICK_UP_GESTURE
|| type == Sensor.TYPE_WRIST_TILT_GESTURE
|| type == Sensor.TYPE_DYNAMIC_SENSOR_META) {
wakeUpSensor = true;
}
for (Sensor sensor : l) {
if (sensor.isWakeUpSensor() == wakeUpSensor) return sensor;
}
return null;
}
public List<Sensor> getSensorList(int type) {
// cache the returned lists the first time
List<Sensor> list;
final List<Sensor> fullList = getFullSensorList();
synchronized (mSensorListByType) {
list = mSensorListByType.get(type);
if (list == null) {
if (type == Sensor.TYPE_ALL) {
list = fullList;
} else {
list = new ArrayList<Sensor>();
for (Sensor i : fullList) {
if (i.getType() == type) {
list.add(i);
}
}
}
list = Collections.unmodifiableList(list);
mSensorListByType.append(type, list);
}
}
return list;
}
/===================================================================//
从java层到SEE层看怎样得到sesorlist的, 这个过程对java app而言是隐藏的,当java api getDefaulSensor时已经建立。
frameworks/base/services/core/java/com/android/server/power/PowerManagerService.java
SensorManager sensorManager = new SystemSensorManager(mContext, mHandler.getLooper());
frameworks/base/core/java/android/hardware/SystemSensorManager.java
/** {@hide} */
public SystemSensorManager(Context context, Looper mainLooper) {
synchronized (sLock) {
if (!sNativeClassInited) {
sNativeClassInited = true;
nativeClassInit();
}
}
mMainLooper = mainLooper;
mTargetSdkLevel = context.getApplicationInfo().targetSdkVersion;
mContext = context;
mNativeInstance = nativeCreate(context.getOpPackageName());
// initialize the sensor list
for (int index = 0;; ++index) {
Sensor sensor = new Sensor();
if (!nativeGetSensorAtIndex(mNativeInstance, sensor, index)) break;
mFullSensorsList.add(sensor);
mHandleToSensor.put(sensor.getHandle(), sensor);
}
}
frameworks/base/core/jni/android_hardware_SensorManager.cpp
nativeCreate
(JNIEnv *env, jclass clazz, jstring opPackageName)
{
ScopedUtfChars opPackageNameUtf(env, opPackageName);
//通过类的全局函数,也就是static函数
return (jlong) &SensorManager::getInstanceForPackage(String16(opPackageNameUtf.c_str()));
}
framework/native/libs/sensor/SensorManager.cpp
class SensorManager : public ASensorManager
{
public:
static SensorManager& getInstanceForPackage(const String16& packageName);
}
getInstanceForPackage -> SensorManager sensorManager = new SensorManager(opPackageName);
SensorManager::SensorManager(const String16& opPackageName)
: mSensorList(nullptr), mOpPackageName(opPackageName), mDirectConnectionHandle(1) {
Mutex::Autolock _l(mLock);
assertStateLocked();
}
sp<ISensorServer> mSensorServer;
Vector<Sensor> mSensors;
status_t SensorManager::assertStateLocked() {
waitForSensorService(&mSensorServer);
//通过sensorservice的代理调用
mSensors = mSensorServer->getSensorList(mOpPackageName);
}
frameworks/native/libs/sensor/ISensorServer.cpp
virtual Vector<Sensor> getSensorList(const String16& opPackageName)
{
Parcel data, reply;
data.writeInterfaceToken(ISensorServer::getInterfaceDescriptor());
data.writeString16(opPackageName);
remote()->transact(GET_SENSOR_LIST, data, &reply);
Sensor s;
Vector<Sensor> v;
uint32_t n = reply.readUint32();
v.setCapacity(n);
while (n) {
n--;
reply.read(s);
v.add(s);
}
return v;
}
//下面到sensor service的实现部分
//SensorService的构造函数中并没有太多函数呢
class SensorService :
public BinderService<SensorService>,
public BnSensorServer,
protected Thread
{
}
SensorService::SensorService()
: mInitCheck(NO_INIT), mSocketBufferSize(SOCKET_BUFFER_SIZE_NON_BATCHED),
mWakeLockAcquired(false) {
mUidPolicy = new UidPolicy(this);
mSensorPrivacyPolicy = new SensorPrivacyPolicy(this);
}
//继承类的成员函数:onFirstRef
void SensorService::onFirstRef() {
ALOGD("nuSensorService starting...");
SensorDevice& dev(SensorDevice::getInstance());
}
//这里调到SensorDevice::getInstance(),单例化SensorDevice
#include <utils/Singleton.h>
template <typename TYPE>
class ANDROID_API Singleton
{
public:
static TYPE& getInstance() {
Mutex::Autolock _l(sLock);
TYPE* instance = sInstance;
if (instance == nullptr) {
instance = new TYPE();
sInstance = instance;
}
return *instance;
}
static bool hasInstance() {
Mutex::Autolock _l(sLock);
return sInstance != nullptr;
}
protected:
~Singleton() { }
Singleton() { }
private:
Singleton(const Singleton&);
Singleton& operator = (const Singleton&);
static Mutex sLock;
static TYPE* sInstance;
};
class SensorDevice : public Singleton<SensorDevice>,
public SensorServiceUtil::Dumpable {
}
SensorDevice::SensorDevice()
: mHidlTransportErrors(20),
mRestartWaiter(new HidlServiceRegistrationWaiter()),
mEventQueueFlag(nullptr),
mWakeLockQueueFlag(nullptr),
mReconnecting(false) {
if (!connectHidlService()) {
return;
}
initializeSensorList();
mIsDirectReportSupported =
(checkReturnAndGetStatus(mSensors->unregisterDirectChannel(-1)) != INVALID_OPERATION);
}
//mSensors成员变量是访问hidl service的代理接口
sp<SensorServiceUtil::ISensorsWrapper> mSensors;
bool SensorDevice::connectHidlService() {
HalConnectionStatus status = connectHidlServiceV2_0();
if (status == HalConnectionStatus::DOES_NOT_EXIST) {
status = connectHidlServiceV1_0();
}
return (status == HalConnectionStatus::CONNECTED);
}
SensorDevice::HalConnectionStatus SensorDevice::connectHidlServiceV1_0() {
sp<V1_0::ISensors> sensors = V1_0::ISensors::getService();
mSensors = new SensorServiceUtil::SensorsWrapperV1_0(sensors);
}
void SensorDevice::initializeSensorList() {
checkReturn(mSensors->getSensorsList(
[&](const auto &list) {
const size_t count = list.size();
//下面看下hidl service的方法
proprietary/sensors-see/sensors-hal/framework/sensors_hal.cpp
//hidl接口get_sensors_list
int sensors_hal::get_sensors_list(const sensor_t **s_list)
{
int num_sensors = (int)_hal_sensors.size();
sns_logi("num_sensors=%d", num_sensors);
*s_list = &_hal_sensors[0];
return num_sensors;
}
sensors_hal的构造函数
sensors_hal::sensors_hal()
{
init_sensors();
}
void sensors_hal::init_sensors()
{
auto sensors = sensor_factory::instance().get_all_available_sensors();
auto cb = [this](const auto& event, auto wakeup) { _event_queue.push(event, wakeup); };
sns_logi("initializing sensors");
for (unique_ptr<sensor>& s : sensors) {
assert(s != nullptr);
s->register_callback(cb);
s->update_system_prop_details(_is_rt_thread_enable, _atrace_delay_checktime_ms);
const sensor_t& sensor_info = s->get_sensor_info();
sns_logd("%s: %s/%d wakeup=%d", sensor_info.name,
sensor_info.stringType, sensor_info.handle,
(sensor_info.flags & SENSOR_FLAG_WAKE_UP) != 0);
if (((sensor_info.flags & SENSOR_FLAG_WAKE_UP) != 0)
&& (s->get_reporting_mode() == SENSOR_FLAG_CONTINUOUS_MODE)) {
sns_logi("don't add sensor %s: %s/%d wakeup=%d", sensor_info.name,
sensor_info.stringType, sensor_info.handle,
(sensor_info.flags & SENSOR_FLAG_WAKE_UP) != 0);
} else {
_hal_sensors.push_back(sensor_info);
_sensors[sensor_info.handle] = std::move(s);
}
}
}
//现在的关键是看怎么建立的_hal_sensors
//每个新创建的sensor,都是这个模板
static bool heart_beat_module_init()
{
/* register supported sensor types with factory */
sensor_factory::register_sensor(SENSOR_TYPE_HEART_BEAT,
ssc_sensor::get_available_sensors<heart_beat>);
sensor_factory::request_datatype(SSC_DATATYPE_HEART_BEAT);
return true;
}
SENSOR_MODULE_INIT(heart_beat_module_init);
/**
* @brief register a new sensor type to be supported
*
* @param type sensor type as defined in sensors.h
* @param func factory function for creating sensors of this
* type
*
*/
static void register_sensor(int type, get_available_sensors_func func)
{
try {
callbacks().emplace(type, func);//emplace是个啥?
} catch (const std::exception& e) {
sns_loge("failed to register type %d", type);
}
}
/**
* @brief generic function template for creating ssc_sensors of
* a given typename S
*/
template<typename S>
static std::vector<std::unique_ptr<sensor>> get_available_sensors()
{
const char *datatype = S::ssc_datatype();
const std::vector<sensor_uid>& suids =
sensor_factory::instance().get_suids(datatype);
std::vector<std::unique_ptr<sensor>> sensors;
for (const auto& suid : suids) {
if (!(sensor_factory::instance().get_settings()
& DISABLE_WAKEUP_SENSORS_FLAG)) {
try {
sensors.push_back(std::make_unique<S>(suid, SENSOR_WAKEUP));
}
}
try {
sensors.push_back(std::make_unique<S>(suid, SENSOR_NO_WAKEUP));
}
}
return sensors;//这个函数调用时创建了sensor
}
// 这里_suid_map已经赋值了,啥时候赋值的?
const std::vector<sensor_uid>& sensor_factory::get_suids(const std::string& datatype) const
{
auto it = _suid_map.find(datatype);
if (it != _suid_map.end()) {
return it->second;
} else {
static vector<sensor_uid> empty;
return empty;
}
}
//_suid_map是怎么构建的?
/**
* @brief singleton class for creating sensor objects of
* multiple types, querying information such as SUIDs,
* attributes. Classes that implement sensors are
* registered here.
*/
class sensor_factory
{}
sensor_factory构造函数
{
choose_right_mandantory_list_db();
/* find available sensors on ssc */
discover_sensors();
if (_suid_map.size() > 0) {
retrieve_attributes();
}
}
static const char* mandatory_sensors_list_file = "/mnt/vendor/persist/sensors/sensors_list.txt";
//文件的内容是所有sensor的name, 文件是怎么形成的?编译时形成的?
void sensor_factory::discover_sensors()
{
suid_lookup lookup(
[this](const string& datatype, const auto& suids)
{
this->suids_lookup_callback(datatype, suids);
});
sns_logd("discovering available sensors...");
for (const auto& dt : datatypes()) {
sns_logd("requesting %s", dt.c_str());
lookup.request_suid(dt, true);}
suid_lookup
suid_lookup是理解怎么得到suid的关键, 简而言之,通过suid_lookup获得了suid
当然要通过ssc_connection才能和SEE通信, suid_lookup隐藏了这一细节
#include "ssc_utils.h"
/**
* @brief type alias for an suid event function
*
* param datatype: datatype of of the sensor associated with the
* event
* param suids: vector of suids available for the given datatype
*/
using suid_event_function =
std::function<void(const std::string& datatype,
const std::vector<sensor_uid>& suids)>;
/**
* @brief Utility class for discovering available sensors using
* dataytpe
*
*/
class suid_lookup
{
public:
/**
* @brief creates a new connection to ssc for suid lookup
*
* @param cb callback function for suids
*/
suid_lookup(suid_event_function cb);
/**
* @brief look up the suid for a given datatype, registered
* callback will be called when suid is available for
* this datatype
*
* @param datatype data type for which suid is requested
* @param default_only option to ask for publishing only default
* suid for the given data type. default value is false
*/
void request_suid(std::string datatype, bool default_only = false);
suid_event_function _cb;
void handle_ssc_event(const uint8_t *data, size_t size);
ssc_connection _ssc_conn;
}
最后
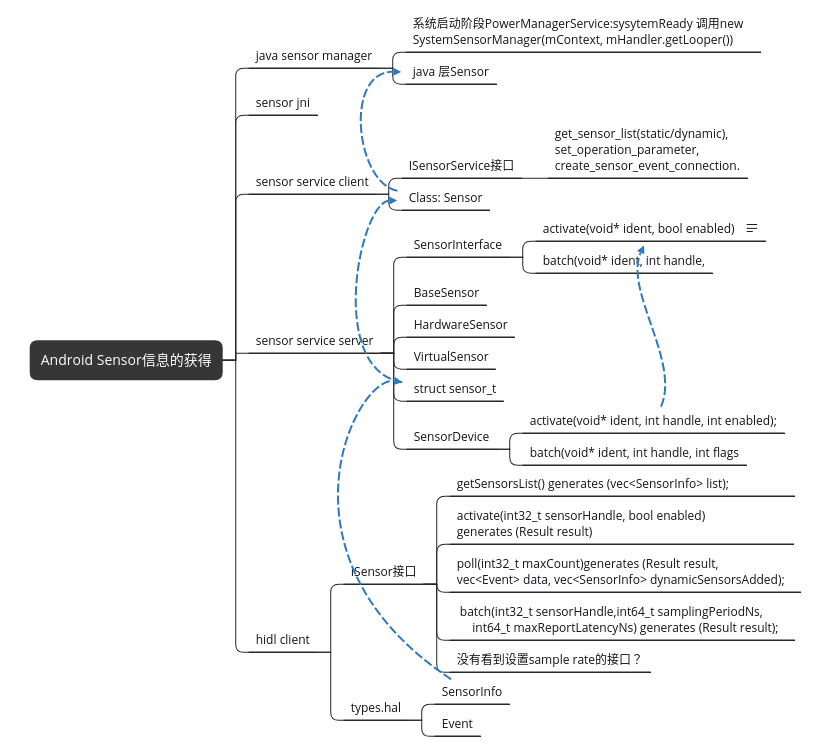
以上就是甜美未来最近收集整理的关于android sensor 是怎样获得sensorlist的何时启动的SensorServiceSensorService的实例化何时创建的SensorService的Client:SystemSensorService创建SensorManager怎样根据type找到Sensor frameworks/base/services/core/java/com/android/server/power/PowerManagerService.javaframeworks/base/core/jn的全部内容,更多相关android内容请搜索靠谱客的其他文章。

![[Android][sensor]确认sensor唤醒源:查看某一时刻\某个场景下,某个sensor被哪个上层apk调用某一时刻\某个场景下某个sensor寻找对应的上层apk](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)






发表评论 取消回复