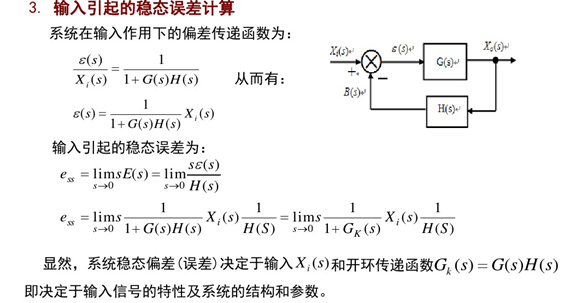
以上是教科书的介绍。有些朋友难以理解。下面用通俗的方式翻译一下:
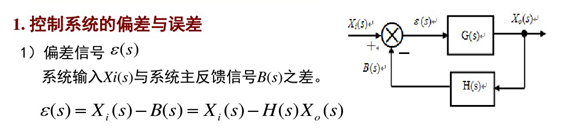
假设系统输入指令5V,得到4.95V的反馈信号,5-4.95=0.05V。这个0.05V就是偏差信号。
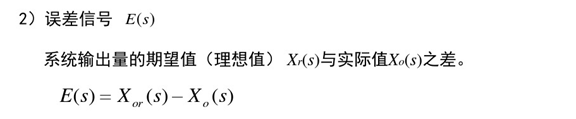
假设一个阀控缸系统,给系统5V的指令,期望油缸走5mm,这个5mm就是期望值(理想值),结果油缸走了4.95mm,这个4.95mm就是实际值。5mm-4.95mm=0.05mm就是误差。
那么误差和偏差有什么关系呢?
简单翻译一下:
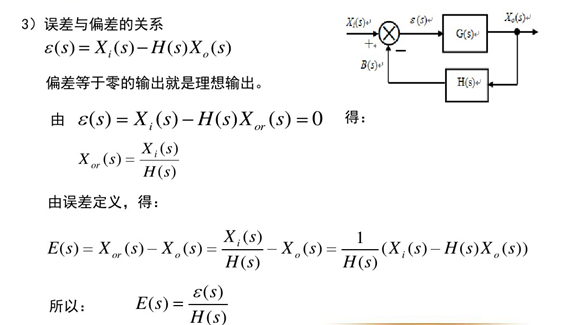
上面举例说明,0.05V是偏差信号,0.05mm是误差信号。那么误差和偏差有什么关系呢?
0.05mm是位移信号,0.05v是电信号。位移信号怎么转换为电信号呢?需要位移传感器,就是LVDT。所以说,误差信号x反馈增益(位移传感器解调增益)=偏差信号。
也就是上面公式说的:
E(s)xH(s)=e(s)
上面说的误差和偏差是瞬时的,那么系统稳定后的偏差和误差叫什么呢?
对了,叫稳态偏差和稳态误差。也就是说当时间很长很久之后的偏差和误差,或者说系统稳态下来之后的偏差和误差。
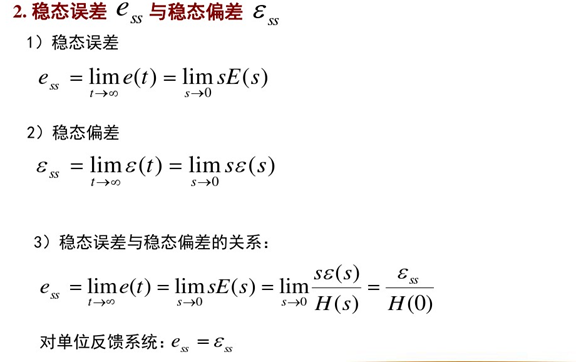
简单的说,稳态误差和稳态偏差,就是经过很久的时间,t无穷大后,系统稳定下来后的偏差和误差。
下面,最关键的,大家最关心的来了,误差怎么计算?和什么有关?
估计推导过程很多人看不懂,没关系,记住结论:
稳态误差和开环增益有关。有什么关系?以后再具体探讨。需要公式计算。
基本概念介绍完后,举例说明误差/偏差和增益的关系。
下图是阀控缸的传递函数:
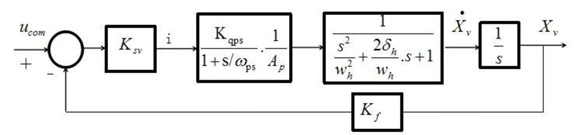
假设阀的死区为1%,指令信号为±10v,那么死区对应电压信号为0.1v。用这个阀去控制油缸,做定位控制。假设5v信号对应5mm定位,这时候给了5V指令,油缸走了4.95mm。误差就是0.05mm。
误差乘以反馈增益,也就是位移传感器增益,假设为1,那么就得到0.05v的偏差信号。这个信号去驱动阀,阀因为在死区内,没有流量输出。所以控制器的PID会将0.05v的偏差信号放大直到为0.1V时,超过阀的死区,这时候输出流量。油缸走到5mm的位置。偏差为0。油缸停止。
可以思考这个过程,0.05mm的误差,先是乘以位移传感器的反馈增益H(s),得到0.05v偏差,再乘以控制器增益Ksv,得到0.1V,再乘以阀的流量增益Kq,经过油缸的积分,最终得到0.05mm。
也就是说 Es xKf x Ksv x Kq/Ap =0.05mm
对于死区:
Es x Kf x Ksv=0.1
从上面可以看出,死区和误差的关系为:
Es=0.1/Kf.Ksv
可以发现,误差和开环增益有关。增益越大,死区造成的误差越小。。
以上只是简单介绍。如果控制变量是速度/加速度,误差又和什么有关呢?具体的计算是怎样的呢?以后有空,专门介绍系统的型次以及和控制变量的之间的关系。
最后
以上就是开放硬币最近收集整理的关于电液伺服系统_电液伺服系统的误差/偏差以及开环增益的全部内容,更多相关电液伺服系统_电液伺服系统内容请搜索靠谱客的其他文章。








发表评论 取消回复