采用波特图方法分析稳定性时候,默认输入为纯正弦波,把S限定在jw轴上变化,w等于极点时候,对应增益下降-3db,无法预测输入为增幅正弦波或其他情况下系统的稳定性。
柯西幅角定理:若S的封闭轨迹为顺时针,且包围了H(s)的P个pole和Z个zero,则H(S)的极坐标里的轨迹图将以同样的方向绕原点旋转Z-P圈。
奈奎斯特方法: 一个反馈系统的闭环传递函数如下所示:
若闭环传递函数 在右半平面或虚轴上有极点(即=0的点)系统会不稳定。
在右半平面或虚轴上有极点(即=0的点)系统会不稳定。
所以可以等效为求在右半平面或虚轴上有没有零点。
我们称右半平面和虚轴为判别区域,构造一个包含判别区域的顺时针S轨迹,由于极点和H(s)极点是一样的,在判别区域一般开环稳定的系统没有极点,所以极坐标里的轨迹图顺时针绕原点的圈数 即为判别区域零点的个数,也即判别区域闭环传递函数极点的个数
作为等效条件,一般情况分析绕(-1,0)顺时针旋转的圈数
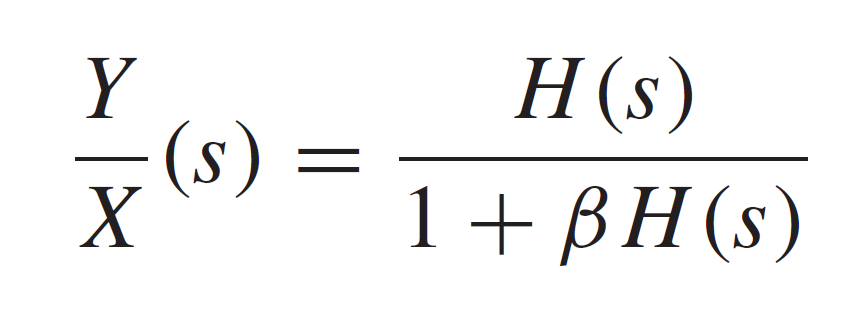
举例:1.单极点系统闭环稳定性
单极点环路增益的轨迹图没有包含(-1,0)点,所以闭环系统稳定
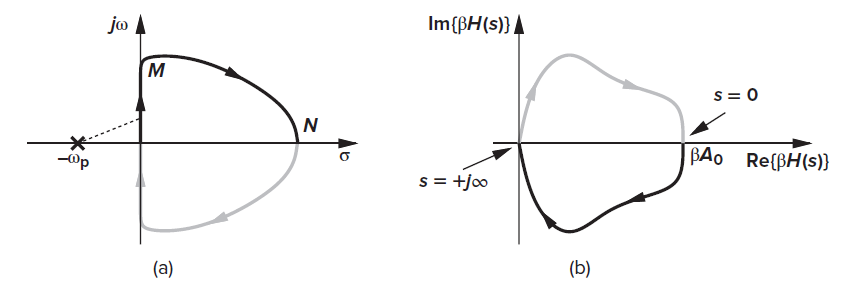
2.两极点系统闭环稳定性:
s从0往上到jw无穷大,相移一直为负的直到-180度,幅度也变为0,从M到N点,幅度为0,相位从-180变为0,从N到jw负无穷,幅度保持为0,相位变为180度,然后相位慢慢再回到0。轨迹图也没包含(-1,0)
(在波特图上,s在jw上移动,相移始终达不到180度,不满足巴克豪森判据)
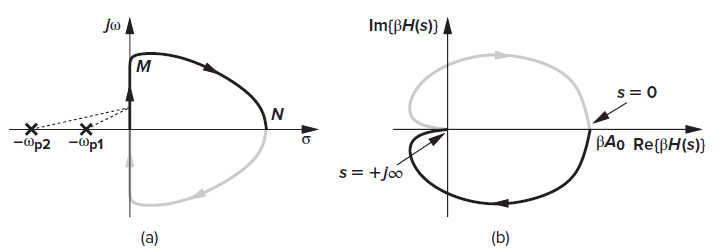
3.三极点系统闭环稳定性:
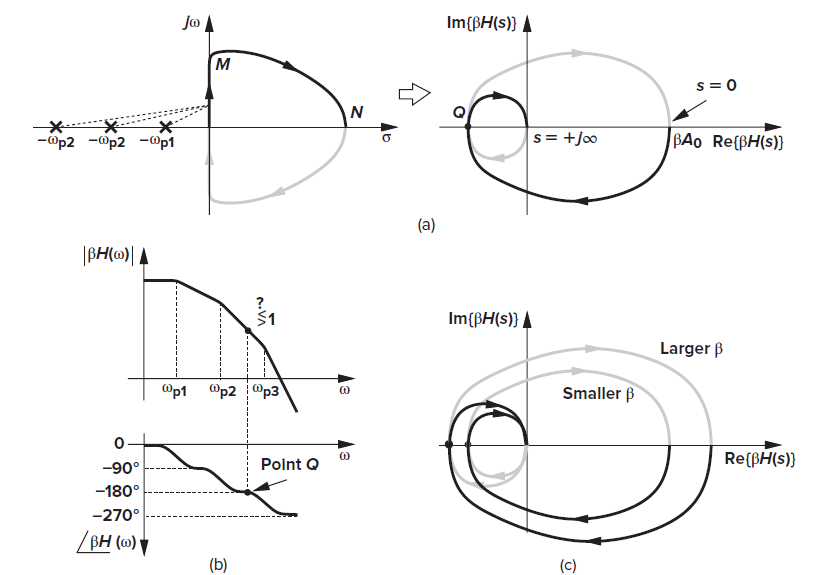
这个系统在0到M点变化中从负方向开始相移了-270度,随后幅值一直是0,直到负jw无穷,角度为+270度,然后回到原点,角度慢慢从270度减小到0,幅值也回去了。可能会包围(-1,0)点。反馈系数越大,越有可能包住这个点,稳定性越差。
4.有两个积分器的反馈系统,,
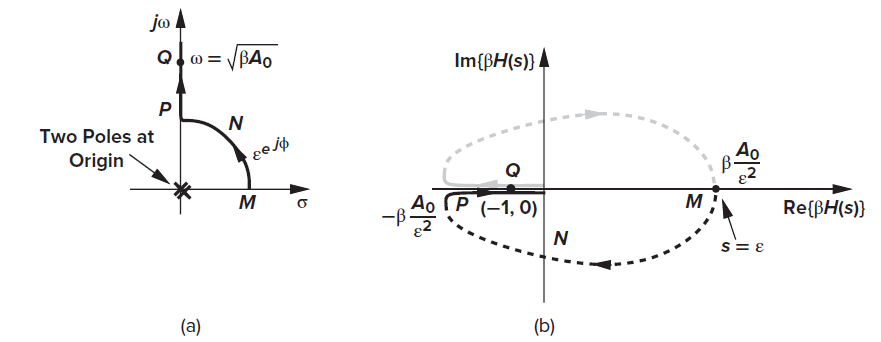
为了避免使环路增益出现无穷大,选取一个围绕原点半径很小的圆来作为S在判别区域的运动轨迹。
从M点出发,相角为0,环路增益是一个很大的值,然后到N点转了-90度,到p点转了-180度,沿jw向上升后,角度不变,幅值从无穷大缩减到0,环路增益必定会在jw轴上的某个点时候对应穿过极坐标里(-1,0)点。
根据对称性,极坐标里它将穿过(-1,0)两次,所以原来闭环函数有2个极点在虚轴上(属于判别区域内),因此该系统是不稳定的
5.相位多次穿越180度系统:
结论:在环路增益幅值大于1的情况下,穿越180度的次数为偶数,系统稳定,穿越180度的次数为奇数,则系统不稳定。
最后
以上就是个性枕头最近收集整理的关于奈奎斯特稳定性依据的全部内容,更多相关奈奎斯特稳定性依据内容请搜索靠谱客的其他文章。








发表评论 取消回复