奈奎斯特判据的推导:
- 一、幅角原理
- 1.s平面到F(s)平面的映射
- 2.F(s)的相角变化
- 3.R = P - Z
- 二、复变函数F(s)的选择
- 1.如何选择F(s)才能与系统稳定性结合
- 2. 1+G(s)H(s) 的优点
- 3. 1+G(s)H(s) 和 G(s)H(s) 的关系
- 三、闭合曲线 Γ 的选择
- 1. G(s)H(s) 无虚轴上的极点
- 2. G(s)H(s) 有虚轴上的极点
- 四、R的求取
- 1.已知曲线 Γ 如何绘制半闭合曲线 ΓGH ?
- ①G(s)H(s) 无虚轴上的极点
- ②G(s)H(s) 有虚轴上的极点
- 1、极点在原点
- 2、极点在虚轴两侧
- 2.R = 2(N+ - N-)
- 五、判断系统稳定性
- 六、总结
提示:本文是奈奎斯特判据的详细推导,能够透彻的了解其中的原理,如果你想快速了解该判据的步骤,可参考我的另一篇文章,链接见文末
一、幅角原理
1.s平面到F(s)平面的映射
设s为复数变量F(s)为s的有理分式。对于s平面上的任意一点,通过F(s)的映射关系,在F(s)平面上必然可确定关于s的象
在s平面上任选一条闭合曲线 Γ ,且不通过F(s)的任一零、极点。当s从闭合曲线 Γ 上任意一点A顺时针沿曲线 Γ 运动一周后,相应地F(s)在F(s)平面上也从F(A)点形成一条闭合曲线 ΓF
即 s的取值为闭合曲线 Γ 上的无数个点,通过F(s)的运算得到无数个新的点,将这些新点连接就是我们的 ΓF
举一个很简单的例子:
F
(
s
)
=
3
s
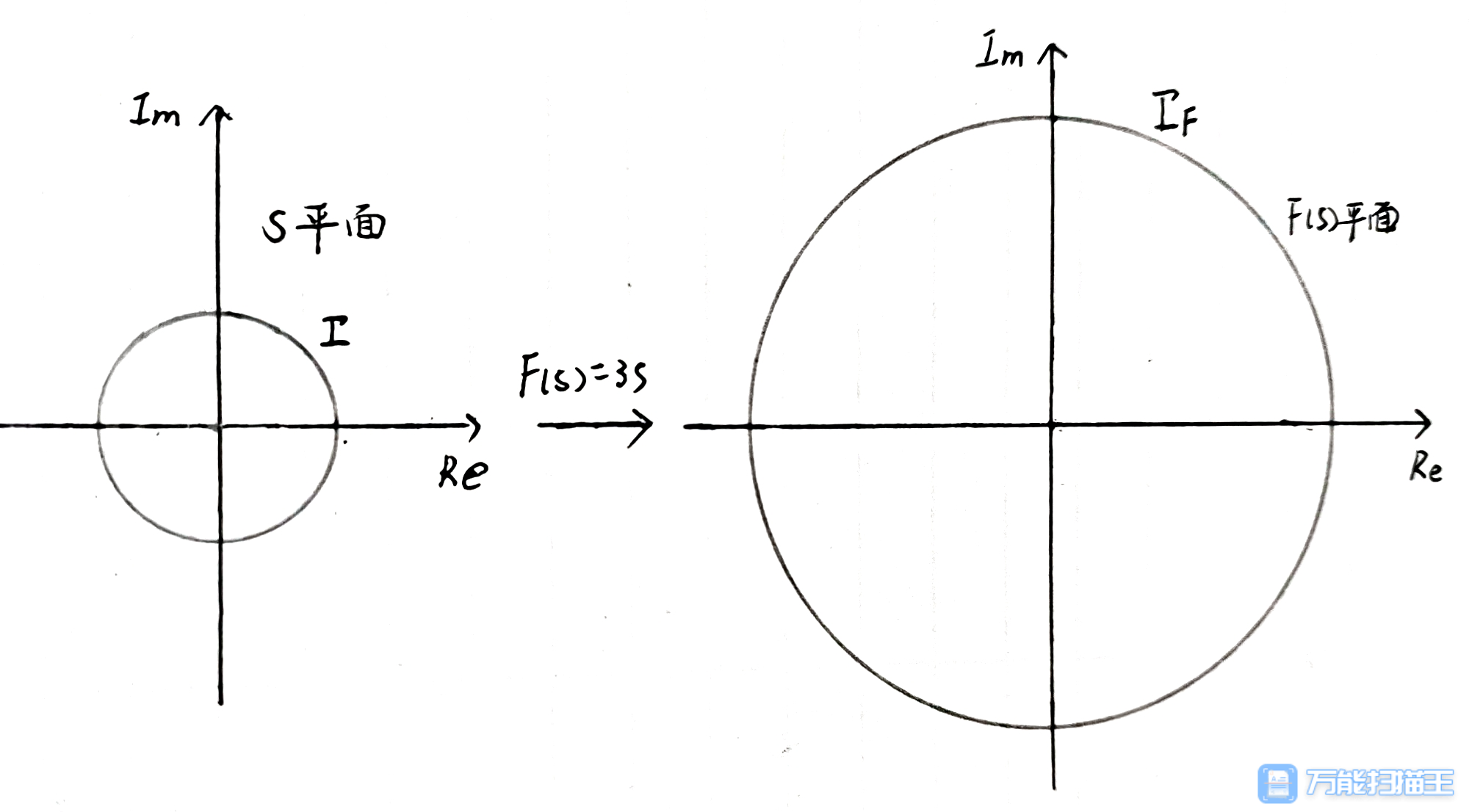
F(s) = 3s
F(s)=3s在s平面上取闭合曲线 Γ 为 |Z| = 1 的圆,如图,经过映射之后在F(s)平面得到的图形为 |Z| = 3 的圆
2.F(s)的相角变化
先问一个问题:当s从闭合曲线 Γ 上任意一点顺时针沿 Γ 运动一周后,F(s)的相角变化了多少?
我们以一个简单的传递函数为例:
F
(
s
)
=
s
−
(
2
+
2
j
)
text{}Fleft( s right) =s-left( 2+2j right) text{}
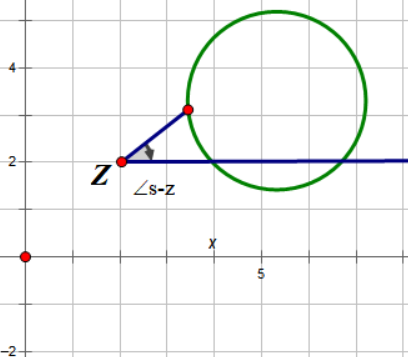
F(s)=s−(2+2j) 其中传递函数的零点为 z = 2 + 2j,F(s)的相角变化就是 ∠s - z 积累的角度,以下根据闭环曲线 Γ 与零点Z的关系分成两种情况讨论
①若选取的闭环曲线 Γ 未包含 z = 2 + 2j ,那么随着点s在闭环曲线上运动一周,我们以z为原点建立坐标系,发现 ∠s - z 最后没有积累角度,F(s)的相角变化为0 :
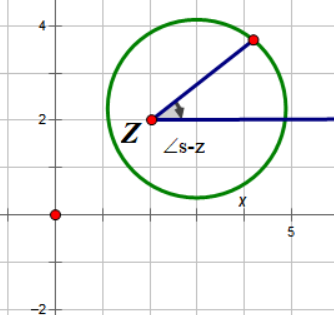
②若选取的闭环曲线 Γ 包含 z = 2 + 2j ,那么随着点s在闭环曲线上运动一周,s回到了原来位置上,但此时 ∠s - z 顺时针积累了2π的角度,F(s)的 相角变化为2π:
所以我们得到结论:
对于闭合曲线 Γ 外的零点和极点,对应的相角变化为0
对于闭合曲线 Γ 内的零点和极点,对应的相角变化为2π
注:闭合曲线 Γ 不通过F(s)的任一零、极点。F(s)的零、极点要么在曲线里面,要么在曲线外面
3.R = P - Z
问一个问题:当传递函数同时有零点、极点,如何分析F(s)的相角变化?
令
:
F
(
s
)
=
(
s
−
z
1
)
(
s
−
z
2
)
(
s
−
p
1
)
(
s
−
p
2
)
令:Fleft( s right) =frac{left( s-z_1 right) left( s-z_2 right)}{left( s-p_1 right) left( s-p_2 right)}
令:F(s)=(s−p1)(s−p2)(s−z1)(s−z2)F(s)可以化为
A
z
1
A
z
2
A
p
1
A
p
2
e
(
φ
z
1
+
φ
z
2
−
(
φ
p
1
+
φ
p
2
)
)
frac{A_{z_1}A_{z_2}}{A_{p_1}A_{p_2}}e^{left( varphi ^{z_1}+varphi ^{z_2}-left( varphi ^{p_1}+varphi ^{p_2} right) right)}
Ap1Ap2Az1Az2e(φz1+φz2−(φp1+φp2))
于是我们可以得到F(s)的相角变化
δ
∠
F
(
s
)
=
δ
∠
s
−
z
1
+
δ
∠
s
−
z
2
−
δ
∠
s
−
p
1
−
δ
∠
s
−
p
2
delta ∠Fleft( s right) =delta ∠s-z_1+delta ∠s-z_2-delta ∠s-p_1-delta ∠s-p_2
δ∠F(s)=δ∠s−z1+δ∠s−z2−δ∠s−p1−δ∠s−p2极点p1、p2作为分母,与零点z1、z2产生的相角变化相反
幅角原理:
F(s)绕平面原点的圈数只和F(s)被闭合曲线 Γ 包围F(s)的零点和极点的代数和有关
设F(s)有Z个零点和P个极点被 Γ 包围,则s沿曲线 Γ 顺时针运动一周时,F(s)变化的相角为 2π(P - Z),在F(s)平面上,闭合曲线 ΓF 逆时针包围原点的圈数为
R
=
P
−
Z
R = P - Z
R=P−Z▷R: ΓF 逆时针包围原点的圈数
▷P:F(s)在s平面闭合曲线 Γ 内被包围的极点数
▷Z:F(s)在s平面闭合曲线 Γ 内被包围的零点数
R > 0 和 R < 0分别表示 曲线ΓF 逆时针包围原点和顺时针包围原点的圈数,R = 0 表示曲线 ΓF 不包围原点
为什么是 ΓF 包围原点的圈数,而不是其它点呢?
因为我们计算得到F(s)相角的变化为2π的整数倍,在F(s)平面中,要使F(s)对应的点变化的相角为2π的整数倍,那么闭合曲线 ΓF 里一定要包含原点,所以我们取包含原点的圈数
如何将幅角原理与系统稳定性结合起来呢?别着急我们慢慢往下看
二、复变函数F(s)的选择
1.如何选择F(s)才能与系统稳定性结合
☆ F(s)选择成: 1 + G ( s ) H ( s ) 1+G(s)H(s) 1+G(s)H(s)为什么?1+G(s)H(s)有什么特殊意义吗?
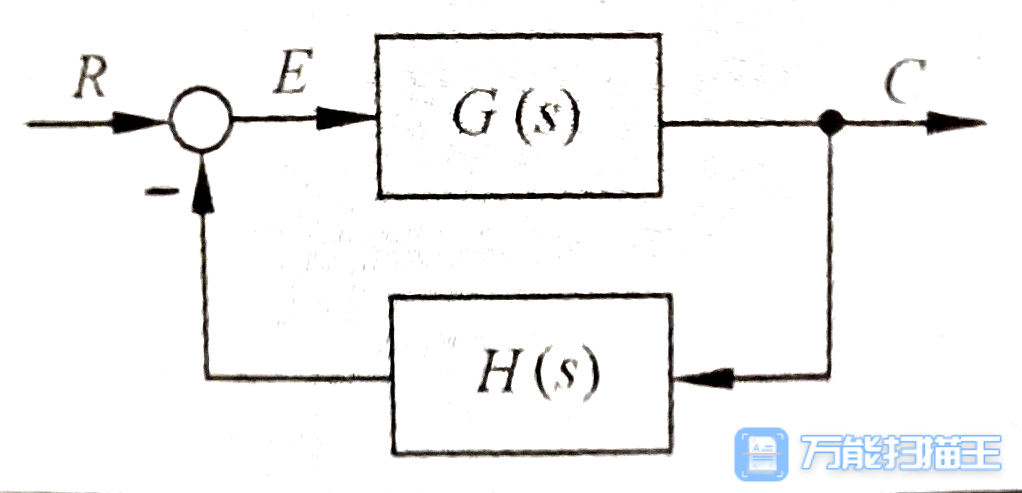
对于这样一个负反馈系统:
令
:
G
(
s
)
=
s
+
2
s
+
5
,
H
(
s
)
=
1
s
+
4
令:Gleft( s right) =frac{s+2}{s+5} ,Hleft( s right) =frac{1}{s+4}
令:G(s)=s+5s+2 ,H(s)=s+41可以得到:
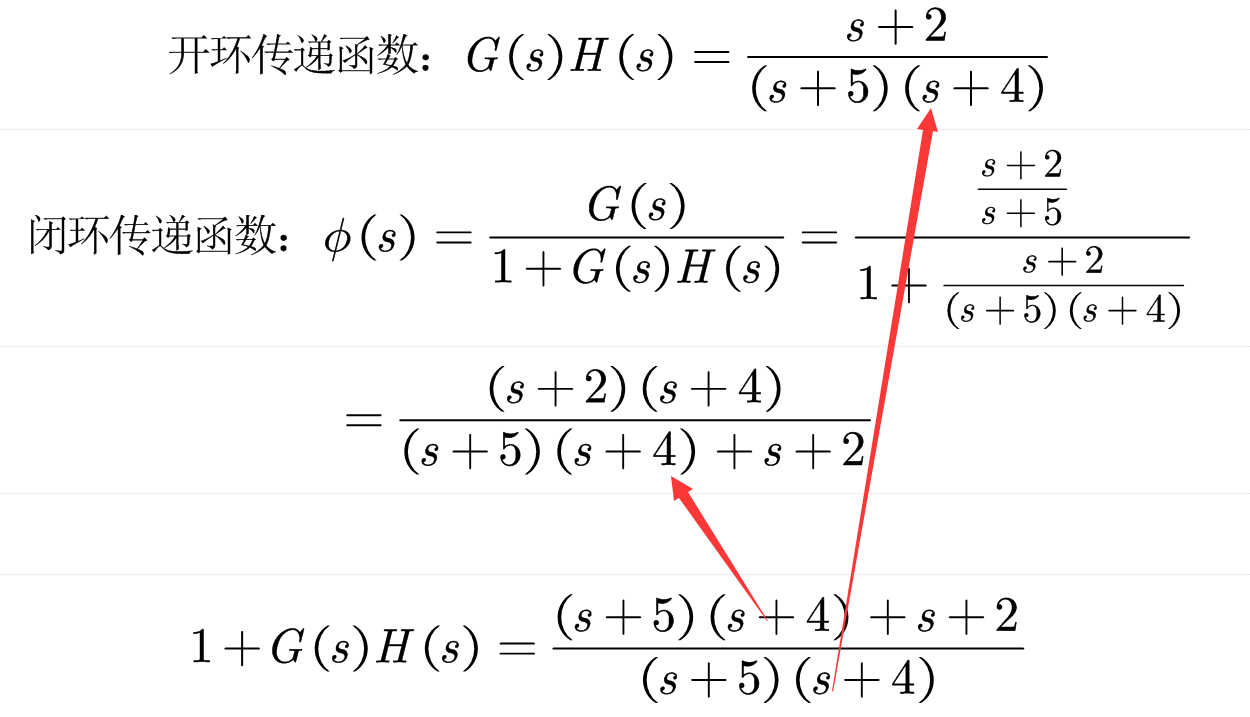
发现1+G(s)H(s)的分子分母具有特殊的意义:
▷1+G(s)H(s)的零点为闭环传递函数的极点
▷1+G(s)H(s)的极点为开环传递函数的极点
那么使用1+G(s)H(s)就可以同时包含开环传函和闭环传函的极点
2. 1+G(s)H(s) 的优点
在控制系统中是利用开环传递函数来判断闭环系统的稳定性的
若我们将s平面的闭合曲线 Γ 取成整个右半平面
那么对于F(s)=1+G(s)H(s)来说,我们令F(s)在右半平面的零点数和极点数为 Z 和 P
右半平面中闭环传递函数的极点数为0,则系统稳定,即Z = 0 系统稳定
F(s)的极点为开环传递函数的极点,开环传函是已知的,即 P是已知的
在F(s)平面中,闭合曲线 ΓF 逆时针包围原点的圈数为:
R = P − Z R = P - Z R=P−Z
至此,P、Z的意义转化为:
▷R: ΓF 逆时针包围原点的圈数
▷P:开环传递函数在右半平面内的极点数,P是已知的
▷Z:闭环传递函数在右半平面内的极点数,若Z = 0 系统稳定
注意:转化的前提是 ① Γ 取成整个右半平面 ②F(s)=1+G(s)H(s)
至此我们只要结合幅角原理判断Z是否为0,即可判断系统是否稳定了
3. 1+G(s)H(s) 和 G(s)H(s) 的关系
ΓF 与 ΓGH 的关系
F(s)=1+G(s)H(s),相当于在G(s)H(s)的实部加1,即G(s)H(s)向实轴正方向平移了1个单位得到了F(s)
G(s)H(s)对应的闭合曲线 ΓGH 向右平移一个单位得到 F(s) 对应的闭合曲线 ΓF
则R等于 ΓGH 逆时针包围F(s)平面上 点 (-1 , j0) 的圈数
为什么要进行这个等价呢?
因为开环传递函数 G(s)H(s) 比 F(s) 更加有利于分析
至此还剩下两个问题:
①如何设计闭合曲线 Γ ,使得能取满整个右半平面?
②P是已知的,如何求得R?
三、闭合曲线 Γ 的选择
如何设计闭合曲线 Γ ,使得能取满整个右半平面?
幅角原理中要求闭合曲线 Γ 不通过 F(s)的任一零、极点,则 Γ 的选择与虚轴上有无零极点有关
为什么这里一会儿用G(s)H(s) ,一会儿又用 F(s)呢?为什么不考虑虚轴上零点的情况呢?
因为 F(s) = 1+G(s)H(s)的极点 P 就是 G(s)H(s) 的极点,而 F(s) 的零点 Z 是要求解的量,所以讨论G(s)H(s)极点的位置即可
1. G(s)H(s) 无虚轴上的极点
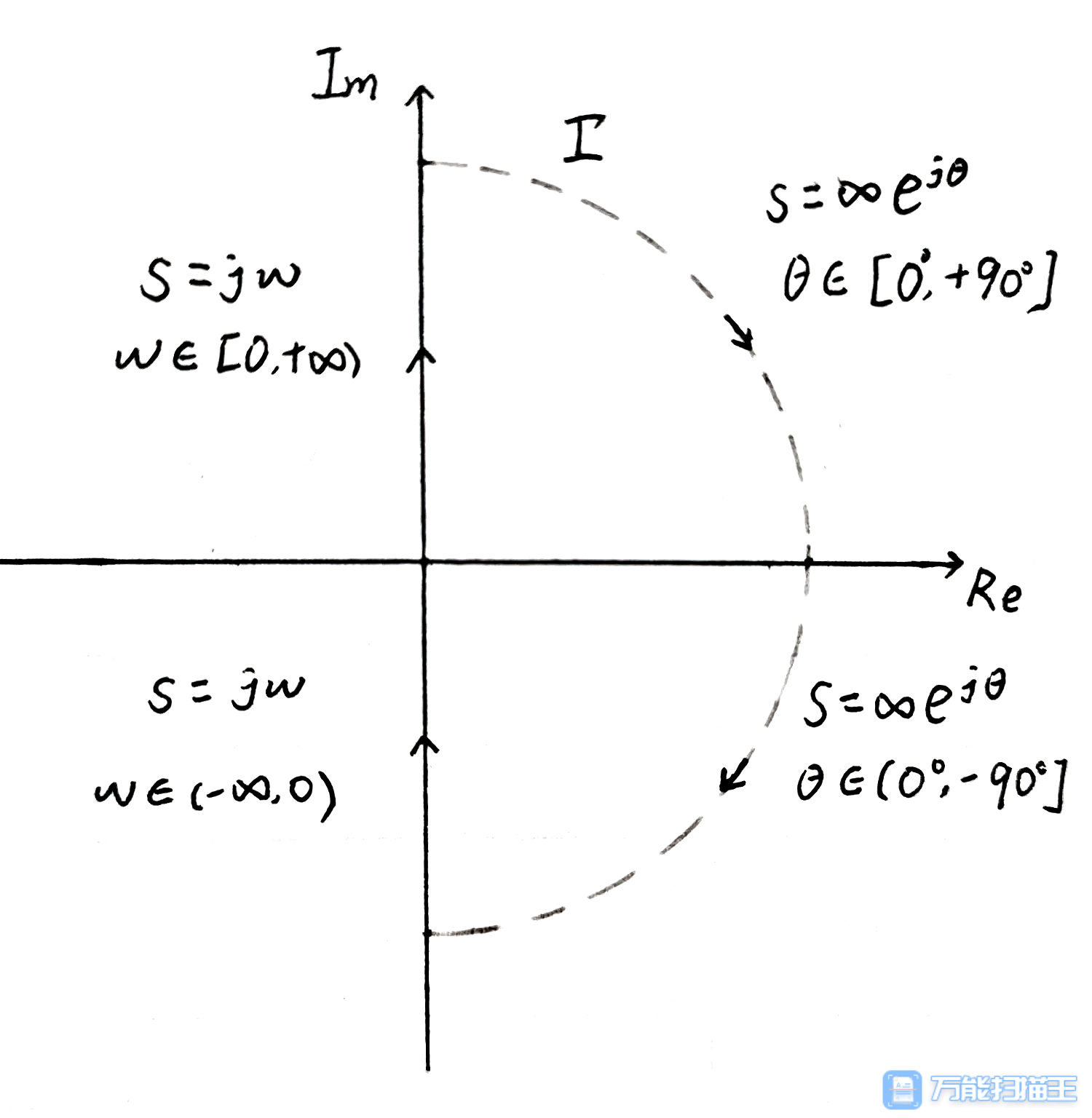
我们以一个以原点为圆心,半径无穷大的半圆表示右半平面:
2. G(s)H(s) 有虚轴上的极点
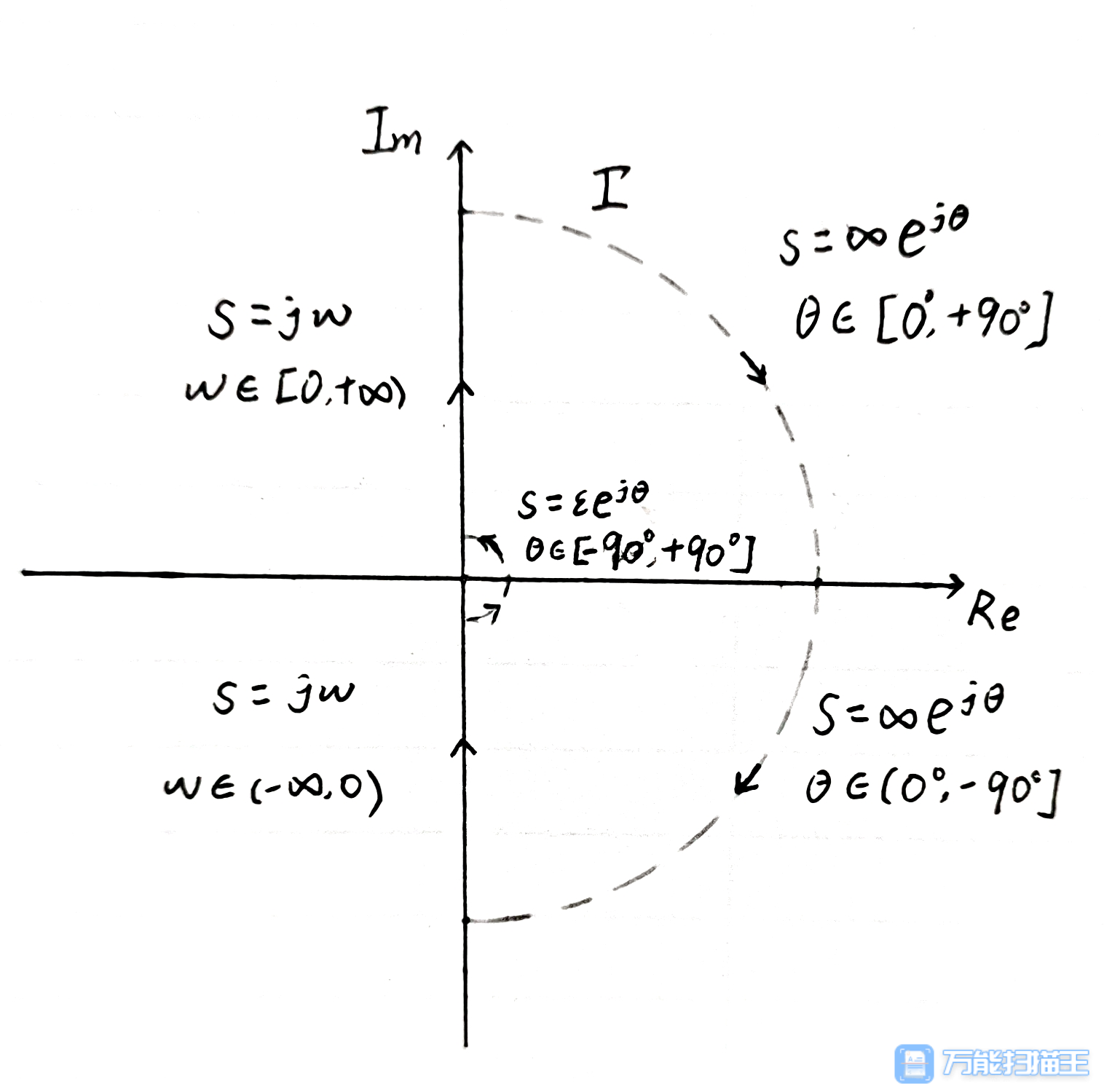
若虚轴上有极点,为了避免闭合曲线 Γ 通过零、极点,我们可以想办法绕过去,则画一个半径无穷小的半圆绕过极点,我们这里只讨论极点在原点的情况:
四、R的求取
R等于 ΓGH 逆时针包围F(s)平面 点(-1 , j0) 的圈数,那么我们将 ΓGH 画出来就可以计算R的大小了
在绘制曲线之前我们先解决两个问题:
①为什么要绘制 G(s)H(s) 闭合曲线 ΓGH ,而不是 ΓF ?
因为选取的s平面闭合曲线 Γ 关于实轴对称, G(s)H(s)是实系数有理分式函数,所以闭合曲线 ΓGH 关于实轴对称。所以我们只用画出 ΓGH 的一半,即Im(s) > 0,s ∈ Γ对应的闭合曲线,这里我们把它叫做半闭合曲线 ΓGH
②为什么闭合曲线 ΓGH 关于实轴对称?
首先 Γ 关于实轴对称,且G(s)H(s)是实系数有理分式函数,意思在表达式里只含有实数,我们举一个例子: G ( s ) H ( s ) = s + 1 s − 3 G(s)H(s)=frac{s+1}{s-3} G(s)H(s)=s−3s+1取关于实轴对称的两点(2+2j)、(2-2j),代入传函得到: 3 + 2 j − 1 + 2 j 、 3 − 2 j − 1 − 2 j frac{3+2j}{-1+2j} text{、 }frac{3-2j}{-1-2j} −1+2j3+2j 、 −1−2j3−2j很明显二者幅值相同,相角相反,关于实轴对称。
1.已知曲线 Γ 如何绘制半闭合曲线 ΓGH ?
①G(s)H(s) 无虚轴上的极点
(1)当
s = j w , w ϵ [ 0 , + ∞ ) , 即虚轴正半轴 s=jw,wepsilon left[ 0,+infty right) ,text{即虚轴正半轴} s=jw,wϵ[0,+∞),即虚轴正半轴
将s = jw 代入开环传递函数G(s)H(s),发现这就是开环奈奎斯特曲线!
(2)
s = ∞ e j θ , θ ϵ ( 90 ° , 0 ° ] ,即第一象限 1 4 圆弧 s=infty e^{jtheta},theta epsilon left( 90°,0° right] text{,即第一象限}frac{1}{4}text{圆弧} s=∞ejθ,θϵ(90°,0°],即第一象限41圆弧
代入开环传递函数G(s)H(s)得
K ( ∞ e j θ ) m + ( ∞ e j θ ) m − 1 + … … ( ∞ e j θ ) n + ( ∞ e j θ ) n − 1 + … … frac{Kleft( infty e^{jtheta} right) ^m+left( infty e^{jtheta} right) ^{m-1}+……}{left( infty e^{jtheta} right) ^n+left( infty e^{jtheta} right) ^{n-1}+……} (∞ejθ)n+(∞ejθ)n−1+……K(∞ejθ)m+(∞ejθ)m−1+……
若n > m,计算结果为平面原点
若n = m,计算结果为系统的增益K
综上,得到对应的闭环曲线为一个点,这个点就是开环奈奎斯特曲线的终点!
所以当G(s)H(s) 无虚轴上的极点时,半闭合曲线 ΓGH 就是开环奈奎斯特曲线 !! ,是不是突然就有迹可循了
关于奈奎斯特曲线的绘制,可以参考我的这篇文章
▷ 三种绘制奈奎斯特曲线的方法
②G(s)H(s) 有虚轴上的极点
1、极点在原点
即开环系统含有积分环节 (1/s)^v
(1)当
s = j w , w ϵ [ 0 , + ∞ ) ; s = ∞ e j θ , θ ϵ [ + 90 ° , 0 ° ] s=jw,wepsilon left[ 0,+infty right) text{;}s=infty e^{jtheta},theta epsilon left[ +90°,0° right] s=jw,wϵ[0,+∞);s=∞ejθ,θϵ[+90°,0°]
对应的就是开环奈奎斯特曲线
(2)当
s = ε e j θ , θ ϵ [ 0 ° , 90 ° ) ,即第一象限 1 4 小圆弧 s=varepsilon e^{jtheta},theta epsilon left[ 0°,90° right) text{,即第一象限}frac{1}{4}text{小圆弧} s=εejθ,θϵ[0°,90°),即第一象限41小圆弧
发现这一段圆弧的末尾就是 s=jw ,而 s=jw 是开环奈奎斯特曲线的起点,所以小圆弧对应的半闭合曲线的终点 就是开环奈奎斯特曲线的起点
以 G ( s ) H ( s ) = 1 s v ( s + 1 ) 为例 text{以\ }Gleft( s right) Hleft( s right) =frac{1}{s^vleft( s+1 right)} text{为例} 以 G(s)H(s)=sv(s+1)1 为例
代入 s = ε e j θ ( ε → 0 + ) , θ ϵ [ 0 ° , + 90 ° ] 得 text{代入}s=varepsilon e^{jtheta}left( varepsilon →0^+ right) ,theta epsilon left[ 0°,+90° right] text{得} 代入s=εejθ(ε→0+),θϵ[0°,+90°]得
G ( s ) H ( s ) = 1 ε v e j v θ ⋅ G 1 ( ε e j θ ) Gleft( s right) Hleft( s right) =frac{1}{varepsilon ^ve^{jvtheta}}cdot G_1left( varepsilon e^{jtheta} right) G(s)H(s)=εvejvθ1⋅G1(εejθ)
A ( 0 + ) = ∞ Aleft( 0^+ right) =infty A(0+)=∞
φ ( 0 + ) = ∠ v × ( − 90 ° ) + ∠ G 1 ( j 0 + ) varphi left( 0^+ right) =∠vtimes left( -90° right) +∠G_1left( j0^+ right) φ(0+)=∠v×(−90°)+∠G1(j0+)
观察 A 和 φ ,发现对应的半闭合曲线是一个 半径无穷大,弧度为∠v×(-90°)的圆弧,但它的起点未知
但是,我们知道对应曲线的终点就是奈奎斯特曲线的起点
所以我们以奈奎斯特曲线的起点 逆时针做一个半径无穷大、弧度为∠v×(-90°) 的圆弧
所以 当G(s)H(s) 有虚轴上的极点,且为积分环节 时
半闭合曲线 ΓGH 为 开环奈奎斯特曲线加上一个半径无穷大、弧度为∠v×(-90°) 的圆弧
举例:其中 v = 2
注:逆时针作一个∠v×(90°) 的圆弧,但圆弧的方向是顺时针,因为角度为负数
2、极点在虚轴两侧
即开环传函有等幅振荡环节
G ( s ) H ( s ) = 1 ( s 2 + w n 2 ) v G 1 ( s ) Gleft( s right) Hleft( s right) =frac{1}{left( s^2+w_n^2 right) ^v}G_1left( s right) G(s)H(s)=(s2+wn2)v1G1(s)
这里就不进行证明了,直接得出结论:
当G(s)H(s) 有虚轴上的极点,且含有等幅振荡环节时
半闭合曲线 ΓGH 为 开环奈奎斯特曲线加上一个半径无穷大、弧度为∠v×(-180°) 的圆弧
同样,圆弧的终点为奈奎斯特曲线的起点,方向为顺时针
2.R = 2(N+ - N-)
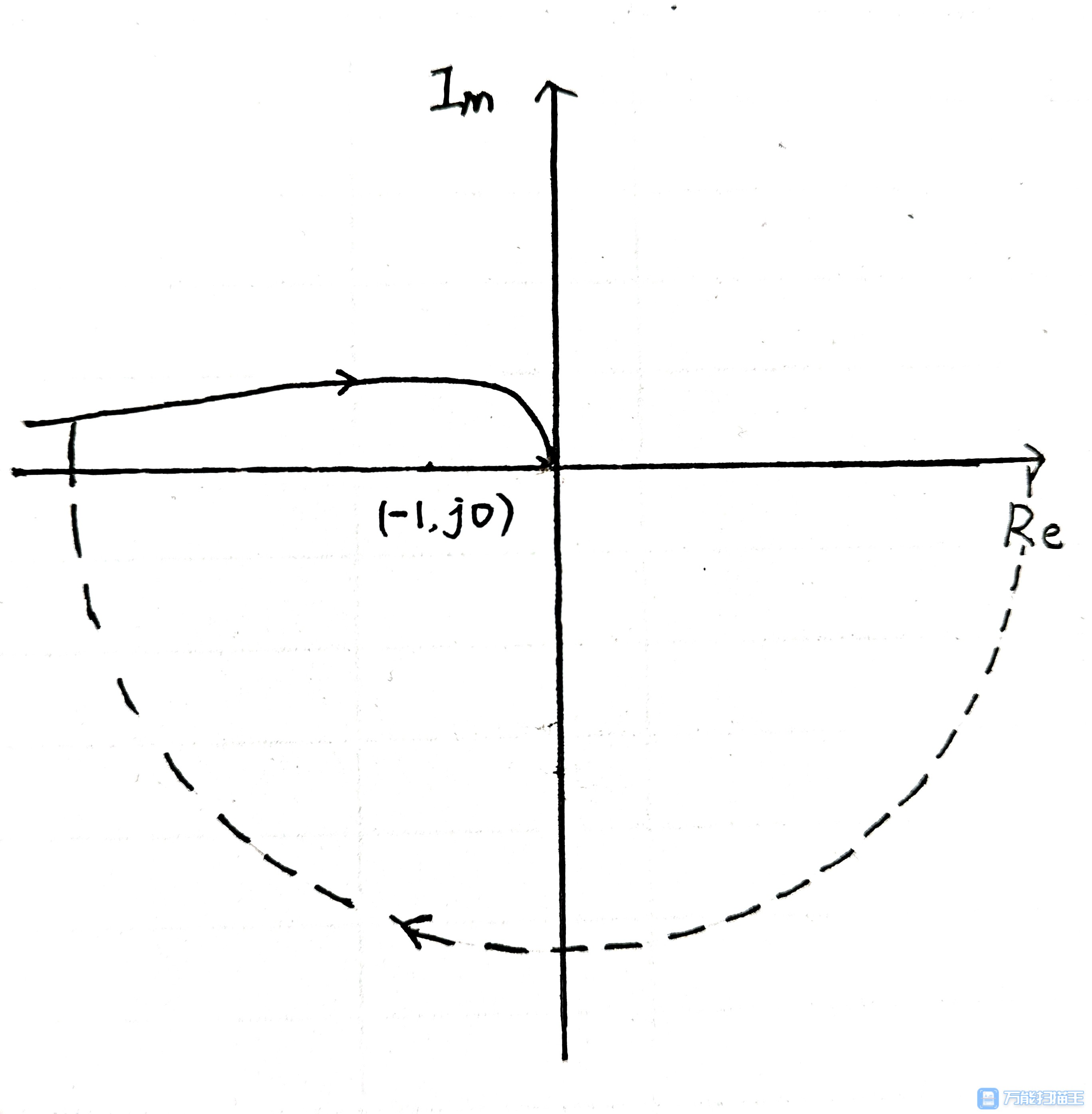
通过上面的过程,绘制出了系统的半闭合曲线 ΓGH ,R是闭合曲线逆时针绕 (-1,j0) 的圈数,N+为 (-1,j0) 左侧 正穿越 的次数 (从上往下) ,N-为 (-1,j0) 左侧 负穿越 的次数 (从下往上),通过几何关系得到
R = 2 ( N + − N − ) R = 2(N_+ - N_-) R=2(N+−N−)
半闭合曲线 ΓGH 只有闭合曲线 ΓGH 关于实轴对称的一半
五、判断系统稳定性
Z = P - R Z = P-R Z=P-R
通过以上的步骤,我们通过画图、计算得到了R,又P是已知的,那么Z就可以计算出来了
Z是闭环传递函数在右半平面的极点数
若Z = 0 ,则系统稳定,反正系统不稳定
六、总结
我们再重新捋一遍思路
①整个推导的核心:
R
(
作
图
求
得
)
=
P
(
已
知
量
)
-
Z
(
希
望
为
0
)
R (作图求得)=P(已知量)- Z(希望为0)
R(作图求得)=P(已知量)-Z(希望为0)
结合幅角原理和F(s)=1+G(s)H(s) 的性质,并取 Γ 为整个右半平面,使得R、P、Z有以下含义:
▷R: ΓF 逆时针包围原点的圈数
▷P:开环传递函数在右半平面内的极点数
▷Z:闭环传递函数在右半平面内的极点数
R同时等于ΓGH 逆时针包围F(s)平面上 点 (-1 , j0) 的圈数
因为在控制系统中是利用开环传递函数来判断闭环系统的稳定性的,开环传递函数是已知的,所以右半平面的极点P已知
②半闭合曲线的绘制
(1)若无虚轴上极点,则绘制奈奎斯特曲线
(2)若极点在原点处,含有积分环节,则绘制开环奈奎斯特曲线加上一个半径无穷大、弧度为∠v×(-90°) 的圆弧
(3)若极点在虚轴两侧,含有振荡环节,则绘制开环奈奎斯特曲线加上一个半径无穷大、弧度为∠v×(-180°) 的圆弧
③求解R
R = 2 ( N + − N − ) R = 2(N_+ - N_-) R=2(N+−N−)
N+为半闭合曲线 ΓGH 在 (-1,j0) 左侧 正穿越 的次数 (从上往下) ,N-为 (-1,j0) 左侧 负穿越的次数 (从下往上)
④求解Z
Z = P - R Z = P-R Z=P-R
若Z = 0 则系统稳定,反之系统不稳定
以上是本人关于奈奎斯特判据的体会,若有错误,欢迎大家批评和交流(*^▽ ^*)/若想要再巩固奈奎斯特判据的步骤,可参考我的这篇文章:
▷奈奎斯特稳定性判据的步骤
最后
以上就是危机外套最近收集整理的关于奈奎斯特稳定性判据的详细推导(手把手教,看完就会!)一、幅角原理二、复变函数F(s)的选择三、闭合曲线 Γ 的选择四、R的求取五、判断系统稳定性六、总结的全部内容,更多相关奈奎斯特稳定性判据的详细推导(手把手教,看完就会!)一、幅角原理二、复变函数F(s)的选择三、闭合曲线内容请搜索靠谱客的其他文章。








发表评论 取消回复