本文在上篇博文复变函数在自动控制原理中的应用之Cauchy原理的基础上,使用Cauchy原理来推导奈奎斯特稳定性判据。
上篇博文中选取复变函数 F ( s ) F(s) F(s)为系统的特征方程,假设开环传递函数是有理真分式:
G
(
s
)
H
(
s
)
=
B
(
s
)
A
(
s
)
G(s) H(s)=frac{B(s)}{A(s)}
G(s)H(s)=A(s)B(s)
则:
F
(
s
)
=
1
+
G
(
s
)
H
(
s
)
=
1
+
B
(
s
)
A
(
s
)
=
A
(
s
)
+
B
(
s
)
A
(
s
)
F(s)=1+G(s) H(s)=1+frac{B(s)}{A(s)}=frac{A(s)+B(s)}{A(s)}
F(s)=1+G(s)H(s)=1+A(s)B(s)=A(s)A(s)+B(s)
我们很容易得到,
F
(
s
)
F(s)
F(s)的零点即为闭环系统的极点;
F
(
s
)
F(s)
F(s)的极点即为开环传递函数的极点;
由Cauchy原理得出结论:在 s s s平面上的封闭曲线 Γ Gamma Γ域内共有 P P P个极点和 Z Z Z个零点,且封闭曲线 Γ Gamma Γ不穿过 F ( s ) F(s) F(s)的任何一个零极点。当 s s s沿 Γ Gamma Γ顺时针移动一周时,函数 F ( s ) F(s) F(s)在 F ( s ) F(s) F(s)平面上的轨迹将包围原点 R = P − Z R=P-Z R=P−Z周(其中,零极点个数需考虑重根,R<0顺时针,R>0逆时针)。
重要结论:
若选封闭曲线
Γ
Gamma
Γ包围整个s域右半平面,则:
系统的开环传递函数正实部极点P已知,只需求出函数
F
(
s
)
F(s)
F(s)在
F
(
s
)
F(s)
F(s)平面上的轨迹包围原点的圈数R(即
G
(
s
)
H
(
s
)
G(s)H(s)
G(s)H(s)包围
−
1
+
j
0
-1+j0
−1+j0点的圈数);便可得到
F
(
s
)
F(s)
F(s)的零点即系统闭环极点在右半平面的个数!!!
s s s平面的闭合曲线 Γ Gamma Γ的选取
首先来选择 s s s平面的闭合曲线 Γ Gamma Γ,为了能够知道系统的闭环稳定性,我们需要知道闭环极点在 s s s平面右半平面的个数,根据上篇博文的推导,这等价于求 F ( s ) F(s) F(s)函数的零点在右半平面的个数,若零点个数为零则系统稳定。为此,要求闭合曲线 Γ Gamma Γ能把整个右半平面包围起来,那么 Γ Gamma Γ可以由两部分组成,如下图所示:
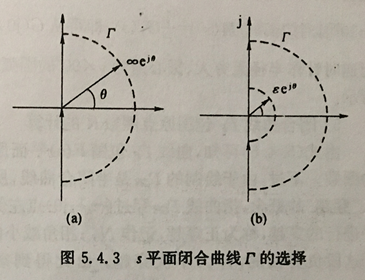
分别是:
1.半径无穷大的半圆
s
=
∞
e
j
θ
,
θ
∈
[
9
0
∘
,
+
9
0
∘
]
s=infty e^{j theta}, thetainleft[90^{circ},+90^{circ}right]
s=∞ejθ,θ∈[90∘,+90∘]
2.虚轴
s
=
j
ω
,
ω
∈
[
−
∞
,
+
∞
]
s=j omega, omega in[-infty,+infty]
s=jω,ω∈[−∞,+∞],
当原点处有开环极点时,需避开该极点,即可以在原点附近取一半径无穷小的圆弧:
s = ε e i θ s=varepsilon e^{i theta} s=εeiθ
其中 ε varepsilon ε为正无穷小, θ ∈ [ − 9 0 ∘ , 9 0 ∘ ] theta inleft[-90^{circ}, 90^{circ}right] θ∈[−90∘,90∘],如上图所示。
G ( s ) H ( s ) G(s)H(s) G(s)H(s)闭合曲线的绘制
s s s平面的闭合曲线 Γ Gamma Γ关于实轴对称,则 G ( s ) H ( s ) G(s)H(s) G(s)H(s)曲线 Γ G H Gamma_{GH} ΓGH也关于实轴对称,所以只需绘制 Γ G H Gamma_{GH} ΓGH在 lm s ⩾ 0 operatorname{lm} s geqslant 0 lms⩾0对应的部分,即可得到 G ( s ) H ( s ) G(s)H(s) G(s)H(s)的半闭合曲线,仍记为 Γ G H Gamma_{GH} ΓGH。接下来分析映射的 Γ G H Gamma_{GH} ΓGH,上半虚轴 s = j ω , ω ∈ [ 0 , + ∞ ] s=j omega, omega in[0,+infty] s=jω,ω∈[0,+∞]对应 G ( s ) H ( s ) = G ( j ω ) H ( j ω ) G(s) H(s)=G(j omega) H(j omega) G(s)H(s)=G(jω)H(jω),即为奈奎斯特曲线。半径无穷大的1/4圆弧 s = ∞ e j θ , θ ∈ [ 0 ∘ , + 9 0 ∘ ] s=infty e^{j theta}, theta inleft[0^{circ},+90^{circ}right] s=∞ejθ,θ∈[0∘,+90∘]映射成:
G ( s ) H ( s ) = { 0 n > m K ∗ n = m G(s) H(s)=left{begin{array}{cc}{0} & {n>m} \ {K^{*}} & {n=m}end{array}right. G(s)H(s)={0K∗n>mn=m
式中 m , n m,n m,n为零极点个数。可见半径无穷大的1/4圆弧在 F ( s ) F(s) F(s)平面的映射为一个点,且该点与虚轴在无穷远处的点映射的点相同,故不需要重复考虑(在 s s s到 F ( s ) F(s) F(s)的映射过程中, s s s域的半径无穷大的圆映射成了点,而虚轴无穷远处的点在该圆弧上)。
特殊的,当原点处有极点时,需要分析半径无穷小的圆弧映射。此时,将系统的开环传递函数写成:
G ( s ) H ( s ) = 1 s v G 1 ( s ) G(s) H(s)=frac{1}{s^{v}} G_{1}(s) G(s)H(s)=sv1G1(s)
式中:
1 s ν ∣ s = ε e j θ = 1 ε ν e − i ν θ left.frac{1}{s^{nu}}right|_{s=varepsilon e^{j theta}}=frac{1}{varepsilon^{nu}} e^{-i nu theta} sν1∣∣∣∣s=εejθ=εν1e−iνθ
当 ε varepsilon ε为正无穷小时,趋近于 ∞ e − j ν θ infty e^{-j nu theta} ∞e−jνθ,注意:此处的 θ theta θ范围为 [ 0 ∘ , + 9 0 ∘ ] left[0^{circ}, +90^{circ}right] [0∘,+90∘]对应原点处的1/4圆弧, ∞ e − j ν θ infty e^{-j nu theta} ∞e−jνθ则表示为半径无穷大的 ν / 4 nu /4 ν/4圆弧。
由于 G 1 ( s ) = K ∏ i = 1 m ( τ j s + 1 ) ∏ i = 1 n ( T i s + 1 ) G_{1}(s)=K frac{prod_{i=1}^{m}left(tau_{j} s+1right)}{prod_{i=1}^{n}left(T_{i} s+1right)} G1(s)=K∏i=1n(Tis+1)∏i=1m(τjs+1)
当 s = ε e j θ s=varepsilon e^{j theta} s=εejθ时,写成极坐标形式 ∣ K ∣ e j ∠ G 1 ( 0 ) |K| mathrm{e}^{mathrm{j} angle mathrm{G}_{1}(0)} ∣K∣ej∠G1(0)。
则有
G ( s ) H ( s ) ∣ s = ε e j θ ≈ ∞ e j [ v × ( − θ ) + ∠ G 1 ( j 0 ) ] G(s) Hleft.(s)right|_{s=varepsilon e^{j theta}}approx infty e^{jleft[v times(-theta)+angle G_{1}(j 0)right] } G(s)H(s)∣s=εejθ≈∞ej[v×(−θ)+∠G1(j0)]
可知,对应的曲线为角度从
∠
G
1
(
j
0
)
angle G_{1}(j 0)
∠G1(j0)起,圆心角为
v
×
(
−
θ
)
v times(-theta)
v×(−θ)的圆弧。即可从
G
(
j
0
+
)
H
(
j
0
+
)
Gleft(j 0_{+}right) Hleft(j 0_{+}right)
G(j0+)H(j0+)点起,逆时针做半径无穷大、圆心角为
v
×
9
0
∘
v times 90^{circ}
v×90∘的圆弧补线(补到正实轴)。
(逆时针做补线的原因:
w
=
0
+
w=0_+
w=0+时刻,内奎斯特曲线的相角为
[
v
×
(
−
θ
)
+
∠
G
1
(
j
0
)
]
left[v times(-theta)+angle G_{1}(j 0)right]
[v×(−θ)+∠G1(j0)],
w
=
0
−
w=0_-
w=0−时刻,相角为
[
∠
G
1
(
j
0
)
]
left[angle G_{1}(j 0)right]
[∠G1(j0)],逆时针方向为相角增加方向,故逆时针加补线)
综上可知,当开环传递函数在原点处有极点时,其奈奎斯特曲线应该分成两段:
s = j ω , ω ∈ [ 0 , + ∞ ] s=j omega, omega in[0,+infty] s=jω,ω∈[0,+∞]
对应: G ( s ) H ( s ) = G ( j ω ) H ( j ω ) G(s) H(s)=G(j omega) H(j omega) G(s)H(s)=G(jω)H(jω)
无穷小半径小圆弧:
s
=
ε
e
j
θ
s=varepsilon e^{j theta}
s=εejθ
对应半径无穷大、圆心角
ν
×
9
0
∘
nu times 90^{circ}
ν×90∘的圆弧,因此其奈奎斯特曲线需从
G
(
j
0
+
)
H
(
j
0
+
)
Gleft(j 0_{+}right) Hleft(j 0_{+}right)
G(j0+)H(j0+)点起,逆时针做半径无穷大、圆心角为
ν × 9 0 ∘ nu times 90^{circ} ν×90∘的圆弧补线(补到实轴!!!)。
如下如所示:

闭合曲线 Γ F Gamma_F ΓF包围 F ( s ) F(s) F(s)平面原点的圈数等于曲线 Γ G H Gamma_GH ΓGH包围 − 1 + j 0 -1+j0 −1+j0点的圈数,但是由于绘制的 Γ G H Gamma_GH ΓGH曲线是半包围曲线,求其包围 − 1 + j 0 -1+j0 −1+j0点的圈数不方便,因此引入”穿越”概念,指 Γ G H Gamma_{GH} ΓGH曲线穿过 − 1 + j 0 -1+j0 −1+j0左侧负实轴,其中随着 w w w增大,曲线以相角增大的方式(逆时针)穿过叫正穿越 N + N_+ N+,以相角减小的方式(顺时针)穿过的叫负穿越 N − N_- N−, Γ G H Gamma_{GH} ΓGH起始或终止于 − 1 + j 0 -1+j0 −1+j0左侧负实轴的穿越称为半次穿越;由于 Γ F Gamma_F ΓF包围原点的圈数 R R R是奈奎斯特曲线 Γ G H Gamma_{GH} ΓGH包围 − 1 + j 0 -1+j0 −1+j0圈数的两倍;
那么:(因为奈奎斯特曲线的起点总在实轴上,终点总在原点处,故一次正穿越即对应逆时针包围 − 1 + j 0 -1+j0 −1+j0一次,同理一次负穿越即对应顺时针包围 − 1 + j 0 -1+j0 −1+j0一次)
R = 2 N = 2 ( N + − N − ) R=2 N=2left(N_{+}-N_{-}right) R=2N=2(N+−N−)
这便引出奈奎斯特稳定性判据:
闭环系统稳定的充分必要条件是,奈奎斯特曲线不穿过 − 1 + j 0 -1+j0 −1+j0点(若穿越且 Z = P − 2 N = 0 Z=P-2 N=0 Z=P−2N=0为临界稳定),且逆时针包围 − 1 + j 0 -1+j0 −1+j0点的圈数 R R R为开环传递函数的正实部极点数 P P P;
进一步的,闭合曲线 Γ G H Gamma_{GH} ΓGH包围函数 F ( s ) = 1 + G ( s ) H ( s ) F(s)=1+G(s)H(s) F(s)=1+G(s)H(s)的零点数即闭环控制系统的正实部极点数为:
Z = P − 2 N Z=P-2 N Z=P−2N
可以看出,奈奎斯特稳定性判据是将时域里的稳定性判据(闭环极点均具有负实部),借助复变函数中的Cauchy原理,转换到了频域,两者本质上是等价的。
最后
以上就是天真乌冬面最近收集整理的关于奈奎斯特稳定性判据的推导的全部内容,更多相关奈奎斯特稳定性判据内容请搜索靠谱客的其他文章。








发表评论 取消回复