Lead_Lag控制器主要从频域的角度来对被控系统进行校正,改善系统的频域特性,如相角裕度、幅值裕度以及灵敏度等,从而改善系统的稳定性及控制精度,是一种基于频率响应的校正方法。
时域的卷积=频域的乘积,这句话很重要,深入理解。
一、Lead-Lag补偿器的数学表示
由胡寿松《控制原理》第六章可知,其Lead-Lag控制器的数学表示如下:
其中,
相角:
幅值:
Lead控制器主要是利用其相角超前特性来提高系统的穿越频率,以此来提高系统带宽,加快系统的响应速度。但应用前提是:待校正系统必须稳定;且待校正的截至频率附近,相角不能过大。
二、Lead-Lag控制器的设计
在实际系统设计中,根据实际对象的频域特性来对系统进行相应的校正。
Ts = 0.05;
num = [9 -8];
den = [1,0];
sys=tf(num,den,Ts);
[mag,phase,omega]= bode(sys);
[mag_max omega1] = max(20*log10(squeeze(mag)));
[phase_max omega2] = max(squeeze(phase));
mag_max_fre = omega(omega1)/2/pi; phase_max_fre = omega(omega2)/2/pi;
subplot(2,1,1);semilogx(omega/2/pi,20*log10(squeeze(mag)));grid on;
text(mag_max_fre, mag_max,'*','color','r');
subplot(2,1,2);semilogx(omega/2/pi,squeeze(phase));grid on;
text(phase_max_fre,phase_max,'o','color','r'); 三、Lead-Lag控制器对系统的影响
- Lead控制器:利用Lead控制器对系统校正时,有如下几点原则:
- 优点:主要是通过提升系统开环截止频率处的相位增益,来改善系统的截止频率及相角裕度,增加了系统的带宽,从而改善闭环系统的动态性能;
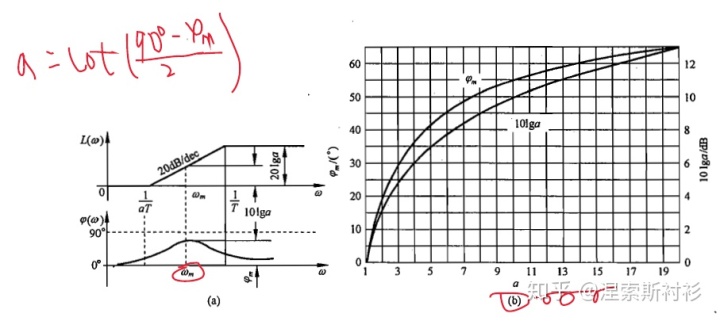
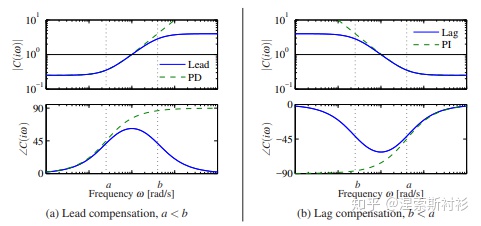
- 缺点:通过超前网络特性图(Fig.1)可知,当
时,
,不可避免地提升了高频增益,这是在对系统校正时需要注意的问题。
- Lead控制器频率的选择:
,其中
为待校正系统的截止频率。
- 应用对象:待校正系统必须稳定,相角裕度,幅值裕度满足稳定的条件。
- 需要思考的问题:系统的带宽,是怎么增加的?
- Lag控制器:利用Lag控制器进行系统校正时,有如下几点原则:
- 优点:由Lag图(Fig.2)可知
,
高频幅值衰减特性。,因此,Lag控制器具有
- 缺点:但
,
,若将校正频率选在待校正系统的截止频率附近,不可避免地会降低系统的相角域度,影响系统的动态响应。为使其对系统相角裕度的影响,应使Lag控制器的频率
。
- Lag控制器可提升系统的稳态响应。
- 应用对象:系统的截止频率大于系统设计的要求,但其他指标不满足,如相角裕度不满足。
综上,当利用Lead-Lag控制器对系统进行串联校正时,可用Lag控制器提高系统的稳态响应,利用Lead控制器来提高系统的动态响应。。问题:PD控制器能提升更宽系统内的相角裕度,为什么不用PD控制器,而采用Lead控制器?
通过对比Lead控制器与PD控制器的数学模型可知,Lead控制器实际上是由PD控制器与一个LPF组成,这样设计的好处是相较于PD,Lead控制器具有一定的高频衰减特性。因此在实际项目中,当引入微分(D)作用时,会引入一个一节低通滤波器(LPF),具体事例可参见《开源飞控》代码,文章《控制算法原理及实现之PID(以飞控为例)》。

四、Lead-Lag控制器与PID控制器的对比
- If it is not specified which type of compensator has to be designed, one should first check the PM and BW of the uncompensated system with adjustable gain K.
- If the BW is smaller than the acceptable BW one may go for lead compensator. If the BW is large, lead compensator may not be useful since it provides high frequency amplification.
- One may go for a lag compensator when BW is large provided the open loop system is stable.
- If the lag compensator results in a too low BW (slow speed of response), a lag-lead compensator may be used.
Lead控制器与PD控制器的对比:PD控制器可提升更宽频带内的相角裕度,特别是当误差信号剧烈变化时,微分作用可以很好地提升系统的控制效果,但同时引入不必要的扰动;而Lead控制器相较于PD控制器具有一定的高频衰减特性。
参考文献
[1] Lecture 8 : Lag-lead Compensator
[2] FAQ: Why is better to use a lead controller than a PD controller?
[3] Introduction: PID Controller Design
[4] Compensation Techniques.
[5] http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace
最后
以上就是激动飞机最近收集整理的关于低通滤波器算法实现_控制算法之超前-滞后补偿器(Lead_Lag Compensator)的全部内容,更多相关低通滤波器算法实现_控制算法之超前-滞后补偿器(Lead_Lag内容请搜索靠谱客的其他文章。



![matlab 绘制系统的单位阶跃响应曲线 并编写程序求峰值时间 超调量 [李园7舍_404]1 内容2 求解](https://www.shuijiaxian.com/files_image/reation/bcimg11.png)




发表评论 取消回复