DTC--直接转矩控制,各种文献上都说它不同于传统的矢量控制依赖数学变换和电机参数,而且直接通过控制定子磁链进而控制电机转矩 ,直面问题,因此转矩响应速度也比矢量控制要快很多。
DTC的模型构建
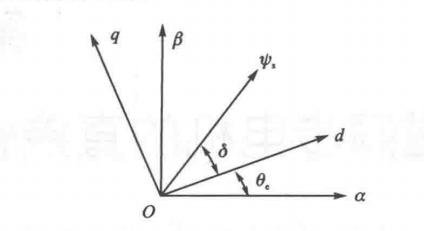
DTC模型在转子旋转坐标系下(d-q轴)建立,控制对象是定子磁链Ψs,从上图可以看出,需要进行定子静止坐标系到转子旋转坐标系变换,那么,定子磁链到d-q轴的变换就是:
Ψd=|Ψs|*cosδ,Ψq=|Ψs|*sinδ (其中,δ 是定子磁链与转子磁链之间的夹角,定义为转矩角)
既然想要以磁链作为研究控制对象,以期找到转矩的控制方法,就不得不写出转矩的表达式了
如是:
Te=1.5*Pn[iq*Ψf+iq*id*(Ld-Lq)]
可以看出,式中出现了电流id,iq,又由于电流和磁链之间有如下关系,可以把电流用磁链转换
有:
Ψd=Ld*id+Ψf,Ψq=Lq*iq
可以写出电流的关于磁链的表达式
id=(Ψd-Ψf)/Ld=[ |Ψs|*cosδ-Ψf ]/Ld,iq=Ψq/Lq=|Ψs|*sinδ/Lq
那么,将代换后的电流表达式带入转矩公式,就可以得到转矩关于磁链的函数
如是: Te=1.5Pn/Ld*|Ψs|*Ψf*sinδ+[ 3(Ld-Lq)/4*Ld*Lq ]*|Ψs|^2*sin 2δ
对于表贴式PMSM来说, Ld=Lq,则Te=1.5*Pn/Ls|Ψs|*Ψf*sinδ
知道了转矩和磁链的关系式之后,就需要利用硬件实现这个控制过程
参考SVPWM控制中的控制思路,DTC采用定子磁场定向控制,采用滞环控制产生了PWM信号,对逆变器上下桥臂开关状态进行控制,获得最佳的转矩动态性能。其中三相电压源逆变器和SVPWM实现方式没有什么不同,只不过在8中开关状态中只用到了6个非零矢量,零矢量没有用到。
对于逆变器电压矢量产生的一些补充:
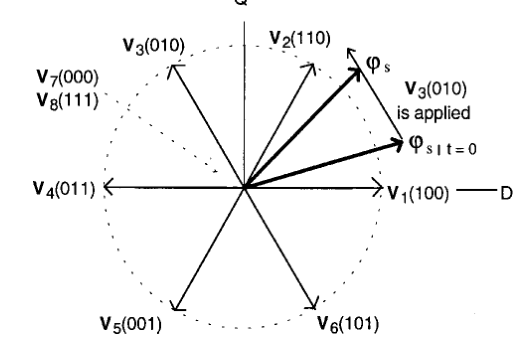

上式是逆变器合成输出电压矢量式,结合上图电压矢量旋转图,图中每60°为一电压矢量区,
其中Vs输出表达式是基于三相自然静止坐标系给出的,正如图中的V1、V3、V5的位置关系一样,那么如果我想要合成出图中的标准矢量电压V2,我只需要让控制V1、V3的桥臂输出,产生相应的电压矢量,就能合成出V2.
也就是说,在Vs中,a,b,c三个轴本身就对应了一个矢量,相位关系:0°,120°,240°;
下面就是面向磁链控制的定性分析表
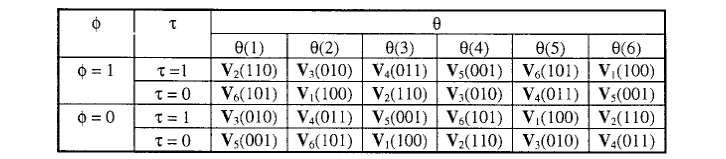
其中,第一列是指转子磁链幅值大小,1表示增大趋势,0表示减小趋势;第二列表示转矩增减趋势,同理。配合上面的电压空间矢量分布图,针对磁链的幅值和转矩增势的四种组合方式,可以给出六个扇区的电压矢量分布表,也称为逆变器的开关表。
一些疑惑:上面基本的都能明白,但是在仿真实现的过程中,很多模型实例都用到了Simulink中的Lookup模块,这部分的使用我一直没有整明白,就卡在这里了。。。郁闷,找了半天都没找到相关讲解。
最后
以上就是大胆电话最近收集整理的关于PMSM电机学习记录--DTC控制的全部内容,更多相关PMSM电机学习记录--DTC控制内容请搜索靠谱客的其他文章。








发表评论 取消回复