自动控制原理学习笔记(一)一般概念
- 一、自动控制理论的发展概述
- 二、基本控制方式
- 三、控制系统分类
- 四、控制系统的基本要求
发现做机器人看论文的时候,还是有很多控制理论上的东西涉及到线性系统、自适应控制、系统辨识、模糊控制等等的东西,所以控制的基础知识还是要看一看。就当做笔记了。
自动控制的概念是:在无人直接参与的情况下,利用控制装置,使工作机械、或生产过程(被控对象)的某一个物理量(被控量)按预定的规律(给定量)运行。
一、自动控制理论的发展概述
1、 经典控制理论 ( 19世纪初—20世纪50年代)
经典控制理论研究的对象基本上是以线性定常系统为主的单输入单输出系统,还不能解决如时变参数问题,多变量强耦合等复杂的控制问题。
经典控制理论框架,以传递函数作为描述系统的数学模型,以时域分析法、根轨迹法、频域分析法为主要分析设计工具。
时域法 复域法(根轨迹法) 频域法
2、现代控制理论 ( 20世纪60年代— )
现代控制理论,是一套以状态方程作为描述系统的数学模型,以最优控制和卡尔曼滤波为核心的控制系统分析设计的原理和方法。主要利用计算机作为系统建模分析、设计以及控制的手段,适用于多变量、非线性、时变系统。
线性系统 自适应控制 预测控制
最优控制 鲁棒控制 滑模控制
最佳估计 容错控制 大系统复杂系统
系统辨识 集散控制 非线性系统理论
3、智能控制理论 ( 20世纪70年代— )
专家系统 遗传算法 模糊控制 多智能体 神经网络
二、基本控制方式
1. 开环控制
2. 闭环控制
负反馈控制:
将系统的输出信号引回输入端,与输入信号相比较,利用所得的偏差信号进行控制,达到减小偏差、消除偏差的目的。 构成闭环控制系统的核心。
闭环(反馈)控制系统的特点:
(1) 系统内部存在反馈,信号流动构成闭回路
(2) 偏差起调节作用
3.复合控制
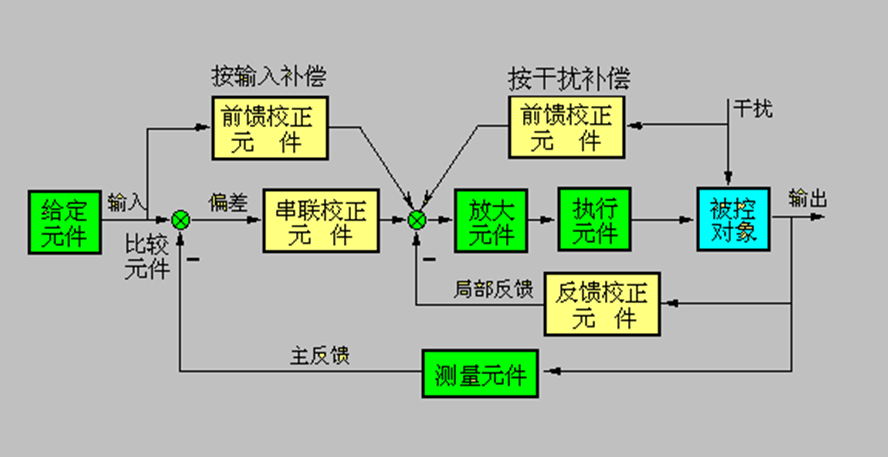
三、控制系统分类
1、按给定信号的形式
恒值系统 / 随动系统 / 程控系统
2、按是否满足叠加原理
线性系统(齐次性、叠加性) / 非线性系统
3、按参数是否随时间变化
定常系统 / 时变系统
4、按信号传递的形式
连续系统 / 离散系统
5、按输入输出变量的多少
单变量系统 / 多变量系统
四、控制系统的基本要求
同一个系统,稳准快三个指标往往是相互制约的,各个系统都会有所侧重。
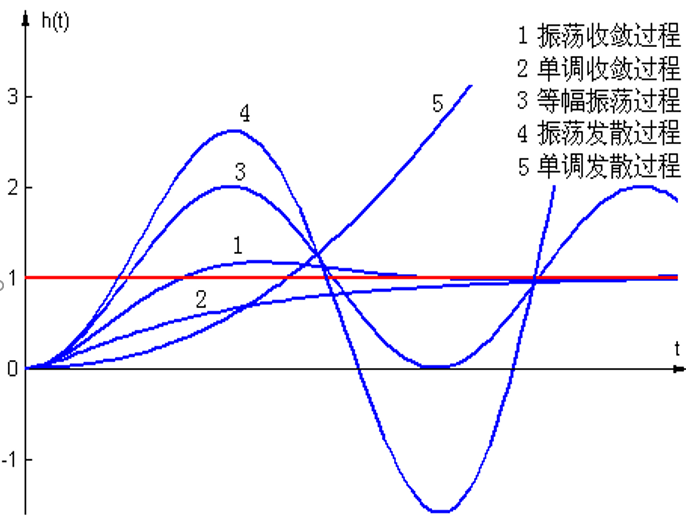
1、稳。
稳定性 系统重新恢复平衡状态的能力。任何一个能够正常工作的控制系统,首先必须是稳定的。稳定是对自动控制系统的最基本要求。并不是只要连接成负反馈形式后系统就一定能正常工作,若系统设计不当或者参数设置不合理,系统响应过程可能出现振荡或者发散。不稳定的系统无法使用,系统激烈而持久的振荡会导致功率元件过载,甚至设备损坏而发生事故,这是绝不允许的。
2、准。
对系统稳态(静态)性能的要求,稳定系统在过度结束后,期望值与实际值的误差就是稳态误差,稳态误差越小,控制精度越高
3、快。
对系统动态(过渡过程)性能的要求,描述动态性能可以用平稳性和快速性加以衡量。平稳是系统从初始状态过渡到新的平衡状态时,具有较小的超调和振荡。快速就是系统过渡的速度。动态性能是衡量系统质量高低的重要指标。
最后
以上就是真实丝袜最近收集整理的关于自动控制原理学习笔记(一)一般概念一、自动控制理论的发展概述二、基本控制方式三、控制系统分类四、控制系统的基本要求的全部内容,更多相关自动控制原理学习笔记(一)一般概念一、自动控制理论内容请搜索靠谱客的其他文章。








发表评论 取消回复