matlab/Simulink与控制系统仿真,作者王正林,例5-18,P137,综合实例
clc;clear all
num1 = [20]; %传递函数的分子
den1 = [1 2 0]; %传递函数的分母
sys1 = tf(num1,den1); %二阶系统的传递函数
num2 = [0.1 0]; %传递函数的分子
den2 = [0 1]; %传递函数的分母
sys2 = tf(num2,den2); %二阶系统的传递函数
sys_inner = feedback(sys1, sys2); %内环反馈的传递函数
sys_outer = feedback(sys_inner, 1); %外环反馈的传递函数
% 20
% --------------
% s^2 + 4 s + 20
%进行稳定性分析
den = [1 4 20]; %分母
roots(den) %求闭环系统特征多项式的根
figure(1)
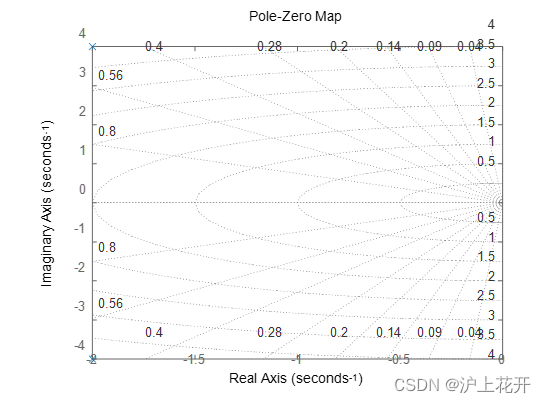
pzmap(sys_outer); %绘制系统零极点图
grid on;
%系统特征根均有负实部,因此闭环系统是稳定的
%求阶跃响应
num = [20];
den = [1 4 20]; %分母
[y,t,x] = step(num,den) %计算闭环系统的阶跃响应
figure(2)
plot(x,y)
grid on
%分析系统的响应特性
%计算系统的超调量
y_stable =1; %阶跃响应的稳态值
max_response = max(y); %闭环系统阶跃响应的最大值
sigma = (max(max_response-y_stable))/y_stable %阶跃响应的超调量
%计算系统的上升时间
for i= 1:length(y) %遍历响应曲线
if y(i) > y_stable %某时刻的输出值大于稳态值
break;
end
end
tr = x(i); %计算此时对应的时间,即上升时间
%计算峰值时间
[max_response, index] = max(y); %查找阶跃响应的最大值
tp = x(index) %计算此时对应的时间,就是阶跃响应的峰值时间
%计算系统的调整时间,取误差带为2%
N = length(y) ;
for i= 1:N %遍历响应曲线
if max(y(i:N))<= 1.02*y_stable %如果当前响应值在误差带内
if min(y(i:N)) >= 0.98*y_stable
break;
end
end
end
ts = x(i) %计算此时对应的时间,即调整时间
运行结果:

最后
以上就是寒冷花卷最近收集整理的关于matlab:分析控制系统稳定性综合实例的全部内容,更多相关matlab内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复