文章目录
- 1 分布滞后模型和自回归模型的关系
- 1.1 分布滞后模型
- 1.2 自回归模型
- 1.3 动态分布滞后模型(ADL模型)
- 2 缓解多重共线性的估计方法
- 2.1 第一类先验约束条件的解决方法
- 2.1.1 非线性最小二乘法(NLS)
- 2.1.2 科克变换
- 2.1.2.1 适应预期模型
- 2.1.2.2 部分调整模型
- 2.2 第二类先验约束条件的解决方法
- 3 动态分布滞后模型(ADL)
- 4 误差修正模型(ECM)
- 模型推导
- ECM模型的特点
1 分布滞后模型和自回归模型的关系
1.1 分布滞后模型
也就是在计量经济学模型中引入时间维度,通常就是将
X
X
X的滞后经济变量引入模型:
Y
t
=
α
+
β
0
X
t
+
β
1
X
t
−
1
+
.
.
.
+
β
s
X
t
−
s
+
u
t
Y_t = alpha+beta_0 X_t+beta_1 X_{t-1}+...+beta_s X_{t-s}+u_t
Yt=α+β0Xt+β1Xt−1+...+βsXt−s+ut
即
Y
Y
Y的当期值会受到
X
X
X与
X
X
X的滞后项影响,也就是
X
X
X当期值和过去值的影响,
X
X
X的影响存在长期影响。
1.2 自回归模型
即
Y
Y
Y的当期值依赖于自身的滞后值,还依赖于其他解释变量
Y
t
=
α
0
+
α
1
Y
t
−
1
+
.
.
.
+
α
s
Y
t
−
s
+
+
β
X
t
+
u
t
Y_t = alpha_0 + alpha_1 Y_{t-1} +...+ alpha_s Y_{t-s} + + beta X_t +u_t
Yt=α0+α1Yt−1+...+αsYt−s++βXt+ut
自己的理解就是,分布滞后模型中表示X对Y有长期影响,自回归模型表示Y具有长期记忆性。
1.3 动态分布滞后模型(ADL模型)
用ADL
(
m
,
s
,
p
)
(m,s,p)
(m,s,p)表示,其中
m
m
m是自回归阶数,
s
s
s是分布滞后阶数,
p
p
p是外生变量个数。
Y
t
=
α
+
∑
i
=
1
m
α
i
Y
t
−
i
+
∑
j
=
1
p
∑
i
=
0
s
β
j
i
X
j
t
−
i
+
u
t
Y_t = alpha +sum_{i=1}^malpha_i Y_{t-i} +sum_{j=1}^{p}sum_{i=0}^{s}beta_{ji} X_{jt-i} +u_t
Yt=α+i=1∑mαiYt−i+j=1∑pi=0∑sβjiXjt−i+ut
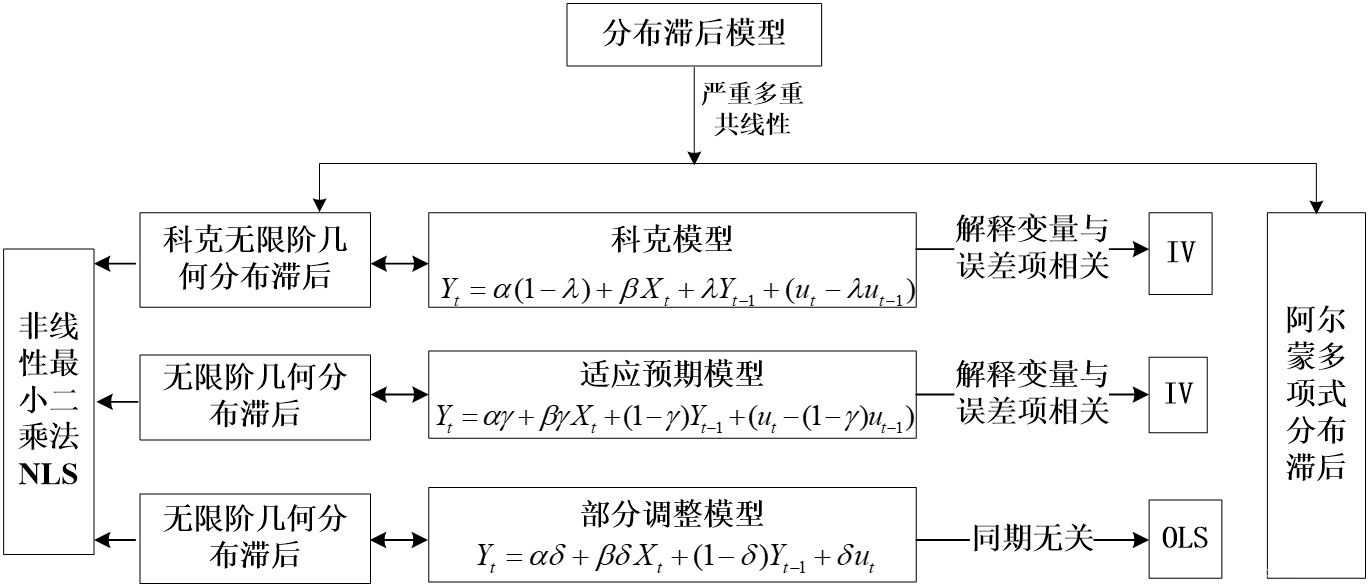
2 缓解多重共线性的估计方法
对于分布滞后模型来说,多重共线性问题非常严重,通常采用对各个系数施加先验的约束条件来减少待估计参数的数目,从而缓解多重共线性问题。
最常用的先验约束条件有两种:
- 假定解释变量滞后阶数为无穷大,且滞后项系数按几何级数递减:
Y t = α + β λ X t + β l a m b d a 2 X t − 1 + . . . + u t Y_t = alpha+beta lambda X_t+beta lambda^2 X_{t-1}+...+u_t Yt=α+βλXt+βlambda2Xt−1+...+ut - 假定各滞后项系数变化可以用多项式描述,去进行曲线拟合:
Y t = α + β 0 X t + β 1 X t − 1 + . . . + β s X t − s + u t Y_t = alpha+beta_0 X_t+beta_1 X_{t-1}+...+beta_s X_{t-s}+u_t Yt=α+β0Xt+β1Xt−1+...+βsXt−s+ut
其中,
β i = α o + α 1 i + α 2 i 2 + . . . + α p i p beta_i = alpha_o+alpha_1 i +alpha_2i^2+...+alpha_p i^p βi=αo+α1i+α2i2+...+αpip
其中p为多项式的阶数,也就是用一个p阶多项式来刻画分布滞后的系数,最大滞后周期m和多项式阶数p可自由选择。
2.1 第一类先验约束条件的解决方法
第一类先验约束条件是假设无限滞后分布加上按照几何级数递减。
Y
t
=
α
+
β
λ
X
t
+
β
λ
2
X
t
−
1
+
.
.
.
+
u
t
Y_t = alpha+beta lambda X_t+beta lambda^2 X_{t-1}+...+u_t
Yt=α+βλXt+βλ2Xt−1+...+ut
上式仅有三个参数:
α
,
β
和
λ
alpha,beta 和lambda
α,β和λ。但是直接估计上式不可行,有两个原因:第一,估计无限多个系数不可行;第二,从回归结果来看,可能
β
和
λ
beta 和lambda
β和λ存在多重解。所以需要用些其他方法求解近似解。
2.1.1 非线性最小二乘法(NLS)
非线性最小二乘法实际上是一种格点搜索法。首先定义
λ
lambda
λ的范围(如0-1),指定一个步长(如0.01),然后每次增加一个步长,依次考虑0.01,0.02,……0.99。步长越小,结果精确度越高,当然计算的时间也越长。
建模步骤:
- 对于
λ
lambda
λ的每个值,计算:
Z t = X t + λ X t − 1 + λ 2 X t − 2 + . . . + λ p X t − p Z_t = X_t + lambda X_{t-1} + lambda^2X_{t-2}+...+lambda^pX_{t-p} Zt=Xt+λXt−1+λ2Xt−2+...+λpXt−p
滞后阶数P的选择准则是,P充分大,这时λP充分小,使得X的P阶以后滞后值对Z无显著影响。
- 然后回归下面的方程:
Y t = α + β Z t + u t Y_t = alpha + beta Z_t +u_t Yt=α+βZt+ut - 对 λ lambda λ的所有取值重复执行上述步骤,选择回归方程产生最高的 R 2 R^2 R2的 λ lambda λ值,则与此 λ lambda λ值相对应的 α alpha α和 β beta β的估计值即为该回归所得到的估计值。
2.1.2 科克变换
科克变换就是无限阶几何分布滞后变成自回归模型的形式,具体变换方法如下:
- 对分布滞后模型两端同取一期滞后:
Y t − 1 = α + β X t − 1 + β λ X t − 2 + β λ 2 X t − 3 . . . + u t − 1 Y_{t-1} = alpha+beta X_{t-1}+beta lambda X_{t-2}+beta lambda^2 X_{t-3}...+u_{t-1} Yt−1=α+βXt−1+βλXt−2+βλ2Xt−3...+ut−1 - 等式两边同乘
λ
lambda
λ,得:
KaTeX parse error: Undefined control sequence: lambdaY at position 2: ̲l̲a̲m̲b̲d̲a̲Y̲_{t-1} = alpha… - 用分布滞后元模型减去上式:
Y t − λ Y t − 1 = α + β X t + β λ X t − 1 + β λ 2 X t − 2 + . . . + u t − ( α + β λ X t − 1 + β λ 2 X t − 2 + β λ 3 X t − 3 . . . + u t − 1 ) = α ( 1 − λ ) + β X t + u t − λ u t − 1 begin{aligned} Y_t - lambda Y_{t-1} &= alpha+beta X_t+beta lambda X_{t-1}+beta lambda^2 X_{t-2}+...+u_t \ &- ( alpha+beta lambda X_{t-1}+beta lambda^2 X_{t-2}+beta lambda^3 X_{t-3}...+u_{t-1})\ &= alpha(1-lambda)+beta X_t + u_t -lambda u_{t-1} end{aligned} Yt−λYt−1=α+βXt+βλXt−1+βλ2Xt−2+...+ut−(α+βλXt−1+βλ2Xt−2+βλ3Xt−3...+ut−1)=α(1−λ)+βXt+ut−λut−1 - 调整一下:
Y t = α ( 1 − λ ) + β X t + λ Y t − 1 + u t − λ u t − 1 Y_t = alpha(1-lambda)+beta X_t +lambda Y_{t-1}+u_t -lambda u_{t-1} Yt=α(1−λ)+βXt+λYt−1+ut−λut−1
上式中,X的变动对Y的短期影响为β。长期影响为β/(1-λ),若λ位于0和1之间,则即长期影响大于短期影响。
2.1.2.1 适应预期模型
2.1.2.2 部分调整模型
2.2 第二类先验约束条件的解决方法
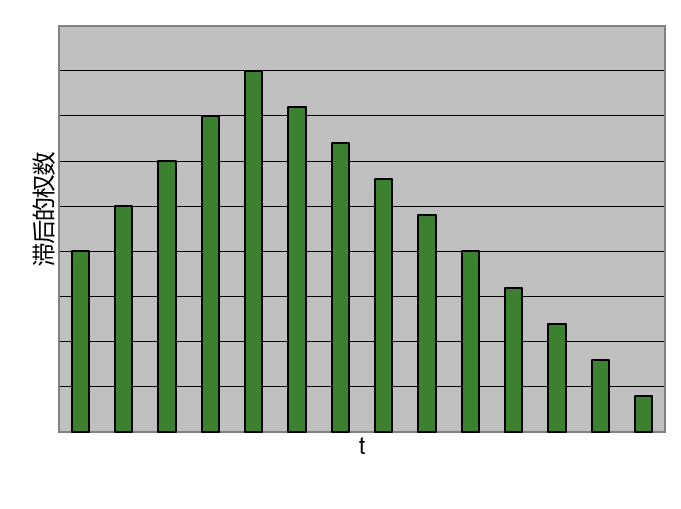
但在某些情况下,解释变量的动态影响为一开始小,随时间变大,然后再次衰减。这时各滞后项系数的变化可以用多项式来描述,因此成为阿尔蒙多项式分布滞后。它是强力的曲线拟合工具,其中二次多项式表现为抛物线。
假设分布滞后模型为以下形式:
Y
t
=
α
+
β
0
X
t
+
β
1
X
t
−
1
+
.
.
.
+
β
s
X
t
−
s
+
u
t
Y_t = alpha+beta_0 X_t+beta_1 X_{t-1}+...+beta_s X_{t-s}+u_t
Yt=α+β0Xt+β1Xt−1+...+βsXt−s+ut
假定:
β
i
=
α
o
+
α
1
i
+
α
2
i
2
+
.
.
.
+
α
p
i
p
beta_i = alpha_o+alpha_1 i +alpha_2i^2+...+alpha_p i^p
βi=αo+α1i+α2i2+...+αpip
其中p为多项式的阶数,也就是用一个p阶多项式来刻画分布滞后的系数,最大滞后周期m和多项式阶数p可自由选择。
3 动态分布滞后模型(ADL)
由于动态分布滞后模型通常存在非常严重的多重共线性,为了剔除多重共线性,大佬们想了一个方法,也就是把短期和长期影响进行分离,从而剔除由于滞后项带来的多重共线性。
简而言之,就是用分析长期关系的方法,消除由于滞后项带来的多重共线性
一般的动态分布滞后模型为:
Y
t
=
α
+
∑
i
=
1
m
α
i
Y
t
−
i
+
∑
j
=
1
p
∑
i
=
0
s
β
j
i
X
j
t
−
i
+
u
t
Y_t = alpha +sum_{i=1}^malpha_i Y_{t-i} +sum_{j=1}^{p}sum_{i=0}^{s}beta_{ji} X_{jt-i} +u_t
Yt=α+i=1∑mαiYt−i+j=1∑pi=0∑sβjiXjt−i+ut
用ADL ( m , s , p ) (m,s,p) (m,s,p)表示,其中 m m m是自回归阶数, s s s是分布滞后阶数, p p p是外生变量个数。
分析长期影响非常简单,直接对ADL模型等式两边取无条件期望(以ADL(1,1)为例):
取无条件期望的原因为:要求长期关系中,Xt的影响要长期稳健,多重共线性才可以证明较弱
Y
t
=
α
0
+
α
1
y
t
−
1
+
β
0
x
t
+
β
1
x
t
−
1
+
u
t
Y_t = alpha_0 +alpha_1 y_{t-1} + beta_0 x_t + beta_1 x_{t-1} +u_t
Yt=α0+α1yt−1+β0xt+β1xt−1+ut
E
(
y
t
)
=
α
0
1
−
α
1
+
β
0
+
β
1
1
−
α
1
E
(
X
t
)
=
θ
0
+
θ
1
x
t
E(y_t)=frac{alpha_0}{1-alpha_1} +frac{beta_0+beta_1}{1-alpha_1}E(X_t)=theta_0 +theta_1 x_t
E(yt)=1−α1α0+1−α1β0+β1E(Xt)=θ0+θ1xt
上式称作静态模型,参数称作静态参数或长期参数。长期参数描述变量之间稳定的均衡关系。
动态模型中的参数称作动态参数或短期参数。短期参数描述变量通向均衡状态过程中的非均衡关系。
4 误差修正模型(ECM)
模型推导
ECM模型由 ADL (m, n, p) 模型变换而来。 下面通过ADL (1, 1) 模型推导简单的ECM模型:
Y
t
=
α
0
+
α
1
y
t
−
1
+
β
0
x
t
+
β
1
x
t
−
1
+
u
t
,
∣
α
1
∣
<
1
,
u
t
−
I
I
D
(
0
,
σ
2
)
Y_t = alpha_0 +alpha_1 y_{t-1} + beta_0 x_t + beta_1 x_{t-1} +u_t, |alpha_1|<1, u_t -IID(0,sigma^2)
Yt=α0+α1yt−1+β0xt+β1xt−1+ut,∣α1∣<1,ut−IID(0,σ2)
ut应不存在自相关和异方差。如果不满足,可通过增加xt和 yt的滞后项或加入新的变量从而使ut满足要求。
从上式两侧同时减
y
t
−
1
y_{t-1}
yt−1,在右侧同时加减
β
0
x
t
−
1
beta_0 x_{t -1}
β0xt−1得:
Δ
Y
t
=
α
0
+
β
0
Δ
x
t
+
(
α
1
−
1
)
y
t
−
1
+
(
β
0
+
β
1
)
x
t
−
1
+
u
t
Delta Y_t = alpha_0 + beta_0 Delta x_t +(alpha_1-1) y_{t-1} + (beta_0 +beta_1)x_{t-1} +u_t
ΔYt=α0+β0Δxt+(α1−1)yt−1+(β0+β1)xt−1+ut
上式右侧第三、四项合并,
Δ
Y
t
=
α
0
+
β
0
Δ
x
t
+
(
α
1
−
1
)
(
y
t
−
1
−
k
1
x
t
−
1
)
+
u
t
Delta Y_t = alpha_0 + beta_0 Delta x_t +(alpha_1-1) (y_{t-1}-k_1 x_{t-1})+u_t
ΔYt=α0+β0Δxt+(α1−1)(yt−1−k1xt−1)+ut
其中,
k
1
=
β
0
+
β
1
1
−
α
1
k_1=frac{beta_0+beta_1}{1-alpha_1}
k1=1−α1β0+β1
在上述变换中没有破坏恒等关系,所以不会影响模型对样本数据的解释能力,也不会改变OLS估计量的性质。
进一步变换,可得ECM模型的标准形式:
Δ
Y
t
=
β
0
Δ
x
t
+
(
α
1
−
1
)
(
y
t
−
1
−
k
0
−
k
1
x
t
−
1
)
+
u
t
,
其
中
,
k
1
=
β
0
+
β
1
1
−
α
1
Delta Y_t = beta_0 Delta x_t +(alpha_1-1) (y_{t-1}-k_0-k_1 x_{t-1})+u_t, 其中, k_1=frac{beta_0+beta_1}{1-alpha_1}
ΔYt=β0Δxt+(α1−1)(yt−1−k0−k1xt−1)+ut,其中,k1=1−α1β0+β1
进一步看看这个ECM模型的式子:
其中,
x
t
x_t
xt和
y
t
y_t
yt长期关系表示为:
y
t
−
1
=
k
0
+
k
1
x
t
−
1
y_{t-1}=k_0+k_1x_{t-1}
yt−1=k0+k1xt−1
x
t
x_t
xt和
y
t
y_t
yt短期关系表示为:
Δ
y
t
=
β
0
Δ
x
t
+
(
α
1
−
1
)
(
⋅
)
Delta y_t = beta_0 Delta x_t +(alpha_1-1)(·)
Δyt=β0Δxt+(α1−1)(⋅)
前一期的非均衡误差表示为:
(
y
t
−
1
−
k
0
−
k
1
x
t
−
1
)
(y_{t-1}-k_0-k_1 x_{t-1})
(yt−1−k0−k1xt−1)
误差修正项表示为:
(
α
1
−
1
)
(
y
t
−
1
−
k
0
−
k
1
x
t
−
1
)
(alpha_1-1) (y_{t-1}-k_0-k_1 x_{t-1})
(α1−1)(yt−1−k0−k1xt−1)
若 y t y_t yt平稳,必有 ∣ α 1 ∣ < 1 |alpha_1|<1 ∣α1∣<1,所以非均衡误差项的系数 ( α 1 − 1 ) (alpha_1-1) (α1−1) 必为负。说明误差修正项对 Δ y t Delta y_t Δyt有一个反向修正作用。
当前一期 y t y_t yt,即 y t − 1 y_{t-1} yt−1相对于均衡点取值过高(低)时,通过误差修正项的反向修正作用,使本期 y t y_t yt减小(增加), y t y_t yt向均衡位置移动。 ( α 1 − 1 ) (alpha_1-1) (α1−1)表示误差修正项对 Δ y t Delta y_t Δyt的调节速度。
ECM模型的特点
- 误差修正模型中既有描述变量长期关系的参数,又有描述变量短期关系的参数;既可研究经济问题的静态(长期)特征又可研究其动态(短期)特征。
- 误差修正模型中的变量不存在多重共线性问题。
- 如何估计ECM模型:
对于平稳变量:
1)推导法:先建立ADL模型,然后再通过变形推导为ECM模型
2)直接估计法:把误差修正项的括号打开,对被解释变量为 Δ y t Delta y_t Δyt,解释变量为 Δ x t Delta x_t Δxt, Δ y t − 1 Delta y_{t-1} Δyt−1, Δ x t − 1 Delta x_{t-1} Δxt−1的模型直接用OLS法估计。
对于非平稳变量,则只有当变量间存在协整关系时,才能得到ECM模型,方法是先估计长期均衡关系,然后把估计的非均衡误差作为误差修正项代入ECM模型,并估计该模型。
- 对于直接估计ECM模型的方法,在建模过程中允许根据t检验和F检验剔除ECM模型中的差分变量。在ECM模型中剔除差分变量,相当于在原ADL 模型中施加一个约束条件。例如剔除差分变量 Δ x t Delta x_t Δxt,相当于在原ADL(1, 1) 模型中施加约束条件, β 0 = 0 beta_0=0 β0=0。
- 在非均衡误差项中剔除任何水平滞后变量都是危险的,这将影响长期关系的表达。
最后
以上就是无聊花生最近收集整理的关于【时间序列分析基础系列之二】自回归分布滞后模型1 分布滞后模型和自回归模型的关系2 缓解多重共线性的估计方法3 动态分布滞后模型(ADL)4 误差修正模型(ECM)的全部内容,更多相关【时间序列分析基础系列之二】自回归分布滞后模型1内容请搜索靠谱客的其他文章。








发表评论 取消回复