文章目录
- 一、计数器
- 1. 计数器概念和分类
- 2. 双时钟可逆十六进制计数器74LS193
- (1) 74LS193的引脚示意图和逻辑功能图
- (2) 74LS193 的逻辑功能表
- 3. 用集成计数器实现任意进制计数
- (1) 反馈清零法和反馈置数法 (M < N)
- a. 反馈清零法
- b. 反馈置数法
- (2) 多个芯片级联(M>N)
- a. 分解法
- b. 扩展法
- 二、寄存器
- 1. 寄存器概念和分类
- 2. 基本寄存器结构和功能
- 3. 集成的基本寄存器
- (1) 由多个边沿D触发器组成的集成寄存器
- (2) 具有输入使能功能的锁存型寄存器
- (3) 具有输出缓冲功能的寄存器
- 4. 移位寄存器
- (1) 单向移位寄存器
- (2) 双向移位寄存器
- (3) 4位双向移位寄存器74LS194
- (4) 移位寄存器的应用——实现数码串/并转换
- 三、多谐震荡电路(补充)
- 1. 多谐振荡器
- 2. 555定时器
- (1) 电路结构
- (2) 工作原理
- (3) 工作原理
- 3. 用555定时器构成多谐振荡器
- (1) 电路结构
- (2) 工作原理
- (3) 振荡频率计算
一、计数器
1. 计数器概念和分类
计数: 累计输入脉冲的个数构成:
- 1 1 1 个触发器有 2 2 2 个状态,可计 2 2 2 个数( 1 1 1 位二进制数)
- n n n 个触发器有 2 n 2^n 2n 个状态,可计 2 n 2^n 2n 个数( n n n 位二进制数)
应用:分频、定时、产生节拍脉冲和脉冲序列、进行数字运算等.
分类如下:
按数制分:
- 二进制计数器
- 十进制计数器
- N N N 进制(任意进制)
计数器按计数方式分:
- 加法计数器
- 减法计数器
- 可逆计数 (
Up-Down Counter,既能够做加法也能够做减法)
按时钟控制分:
- 同步计数器 (
Synchronous) - 异步计数器 (
Asynchronous)
我们的重点在于同步集成计数器。同步计数器的特点:在同步计数器内部, 各个触发器都受同一时钟脉冲——输入计数脉冲(计数就是统计累计输入脉冲的个数)的控制, 因此, 它们状态的更新几乎是同时的, 故被称为 “同步计数器”。
下面就将介绍常用的同步计数器。
2. 双时钟可逆十六进制计数器74LS193
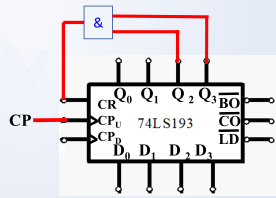
(1) 74LS193的引脚示意图和逻辑功能图
双时钟是指存在两个时钟信号,可逆指的是既可以做加法计数,也可以做减法计数。
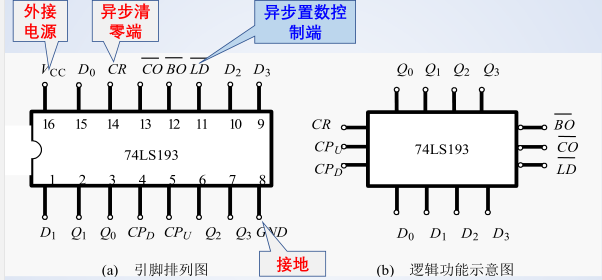
为了使用74LS193,我们必须掌握其引脚的功能:
Vcc:外接电源;GND:接地;- C P D CP_D CPD :减法(down)脉冲输入信号;
- C P U CP_U CPU :加法(up)脉冲输入信号;
- C O ‾ overline {CO} CO :进位输出端,carry output,多个74LS193级联的时候有用处;
- B O ‾ overline {BO} BO :借位输出端,borrow output,多个74LS193级联的时候有用处;
- D 3 D 2 D 1 D 0 D_3D_2D_1D_0 D3D2D1D0 :外部输入数据,用于异步置数;
- Q 3 Q 2 Q 1 Q 0 Q_3Q_2Q_1Q_0 Q3Q2Q1Q0 :计数器输出数据;
- C R CR CR :异步清零端;
- L D ‾ overline {LD} LD :异步置数控制端;
(2) 74LS193 的逻辑功能表
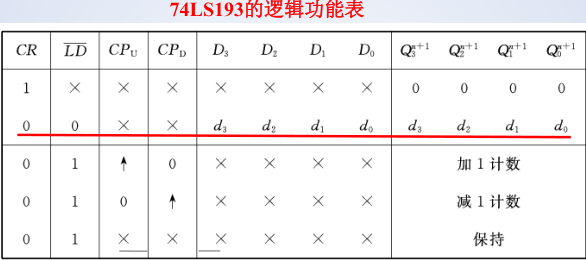
- C R = 1 CR=1 CR=1 时,异步清零,计数器输出数据 Q 3 Q 2 Q 1 Q 0 Q_3Q_2Q_1Q_0 Q3Q2Q1Q0 为 0000 0000 0000;
- C R = 0 , L D ‾ = 0 CR=0,overline {LD}=0 CR=0,LD=0时,异步置数 Q 3 Q 2 Q 1 Q 0 Q_3Q_2Q_1Q_0 Q3Q2Q1Q0 为 D 3 D 2 D 1 D 0 D_3D_2D_1D_0 D3D2D1D0 ;
-
C
R
=
0
,
L
D
‾
=
1
CR=0,overline {LD}=1
CR=0,LD=1,既不清零也不置数,此时如果
C
P
U
↑
CP_{U} uparrow
CPU↑ 且
C
P
D
=
0
CP_D = 0
CPD=0 时,加
1
1
1 计数;当加法计数到达
1111时,进位输出 C O ‾ overline {CO} CO 输出一个脉宽等于 C P U CP_{U} CPU 的低电平部分的低电平脉冲;当下一个 C P U CP_{U} CPU 上升沿到来时, C O ‾ overline {CO} CO 变为高电平,由此产生一个 C O ‾ overline {CO} CO 的上升沿;多个74LS193级联时,正好将低位的 C O ‾ overline {CO} CO 端与高位的 C P U CP_{U} CPU 端连接起来; -
C
R
=
0
,
L
D
‾
=
1
CR=0,overline {LD}=1
CR=0,LD=1,既不清零也不置数,此时如果
C
P
D
↑
CP_D uparrow
CPD↑ 且
C
P
U
=
0
CP_U = 0
CPU=0 时,减
1
1
1 计数;当减法计数到达
0000时,借位输出 B O ‾ overline {BO} BO 输出一个脉宽等于 C P U CP_{U} CPU 的低电平部分的低电平脉冲;当下一个 C P D CP_{D} CPD 上升沿到来时, B O ‾ overline {BO} BO 变为高电平,由此产生一个 B O ‾ overline {BO} BO 的上升沿;多个74LS193级联时,正好将低位的 B O ‾ overline {BO} BO 端与高位的 C P D CP_{D} CPD 端连接起来; - C R = 0 , L D ‾ = 1 CR=0,overline {LD}=1 CR=0,LD=1,且 C P D , C P U CP_D,CP_U CPD,CPU 均无变化时,状态保持。
3. 用集成计数器实现任意进制计数
若已有 N N N 进制计数器,现在要实现 M M M 进制计数器:
M < N:反馈清零法或反馈置数法M > N:多个芯片级联
(1) 反馈清零法和反馈置数法 (M < N)
在
N
N
N 进制计数器的顺序计数过程中, 若设法使之跳过
N
−
M
N - M
N−M 个状态 , 就可以得
到
M
M
M 进制计数器 , 其方法有清零法(复位法)和置数法(置位法)。注意,两种方法的使用是有条件的。
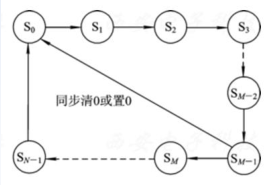
a. 反馈清零法
清零法 适用于有清零输入端(异步 或 同步)的计数器。例如74LS193。
异步清零法和同步清零法存在一些差异,但基本思想都是:计数器从全
0
0
0 状态
S
0
S_0
S0 开始计数,计满
M
M
M 个状态后产生清零信号,使计数器恢复到初态
S
0
S_0
S0 ,然后再重复上述过程。
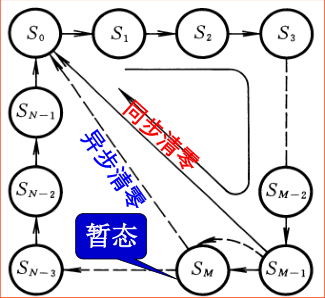
反馈清零法-异步清零:
S
M
S_M
SM 状态进行译码产生置零信号并反馈到异步清零端,74LS193中是
C
R
CR
CR ,使计数器立即返回
S
0
S_0
S0 状态。
S
M
S_M
SM 状态只在极短的瞬间出现,通常称它为“暂态”。
步骤:
(1) 写出状态
S
M
S_M
SM 的二进制代码;
(2) 求归零逻辑:
S
M
S_M
SM 中所有
1
1
1 对应的端口求与(异步清0端高电平有效)或者是求与-非(低电平有效);
(1) 画出电路连线图。
反馈清零法-同步清零:当计数器处于
S
M
−
1
S_{M-1}
SM−1 状态时,产生同步清零信号,在下一个时钟脉冲使芯片转换到零状态。
步骤:
(1) 写出状态
S
M
−
1
S_{M-1}
SM−1 的二进制代码;
(2) 求归零逻辑:
S
M
−
1
S_{M-1}
SM−1 中所有
1
1
1 对应的端口求与(同步清0端高电平有效)或者是求与-非(低电平有效);
(3) 画出电路连线图
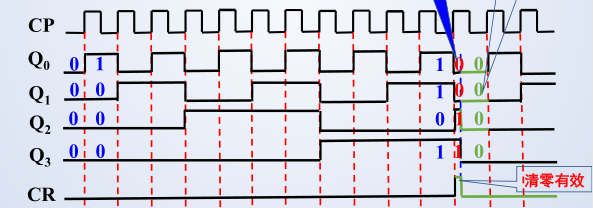
例. 用74LS193构成一个十二进制计数器。
答:74LS193是十六进制计数器,要构成十二进制计数器,可采用反馈清零法。利用异步清零端即可。
步骤:
(1) 写出S M 的二进制编码:
S
M
=
S
12
=
1100
S_M = S_{12} =1100
SM=S12=1100
(2) 求归零逻辑:
C
R
=
Q
3
n
Q
2
n
CR = Q^n_3Q^n_2
CR=Q3nQ2n
(3) 画出电路图:
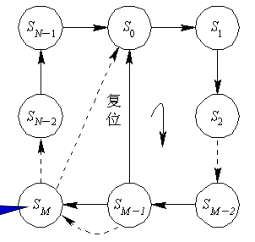
b. 反馈置数法
清
0
0
0 法中,计数器每次都是从全
0
0
0 状态
S
0
S_0
S0 开始计数;
置数法可以通过预置功能使计数器从某个预置状态
S
i
S_i
Si 开始计数, 计满
M
M
M 个状态后产生置数信号,使计数器又进入预置状态
S
i
S_i
Si , 然后再重复上述过程。
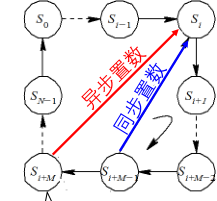
反馈置数法-异步置数:在暂态
S
i
+
M
S_{i+M}
Si+M 产生置数信号,并马上将预置数——
i
i
i 的二进制代码,通过异步置数端置于计数器;适合74LS193;
反馈置数法-同步置数:在状态
S
i
+
M
−
1
S_{i+M-1}
Si+M−1 产生置数信号,要等下一个 CP 到来时,才将预置数置入计数器,故无暂态。置数完成后,计数器从被置入的状态重新开始计数。
例. 采用反馈置数法,用74LS193构成一个十进制计数器。
分析:74LS193是异步置数计数器,共有16个状态,要构成十进制计数器,可从中选取10个连续的状态。选定十个状态
Q
3
Q
2
Q
1
Q
0
Q_3 Q_2 Q_1 Q_0
Q3Q2Q1Q0 为:
0011
→
1100
0011→1100
0011→1100 。
- 写出反馈态 S i + M S_{i+M} Si+M 的二进制代码, 即 S i + M = 1101 S_{i+M} =1101 Si+M=1101;
- 求置数逻辑: L D ‾ = Q 3 Q 2 Q 0 ‾ overline {LD} = overline {Q_3 Q_2 Q_0} LD=Q3Q2Q0;
- 预置态
S
i
=
0011
S_i =0011
Si=0011, 画出电路图:

(2) 多个芯片级联(M>N)
若要求实现的计数器计数值 M M M 超过单片计数器的计数范围, 则必须将多片计数器级联。
a. 分解法
若
M
M
M 可分解为
M
=
M
1
×
M
2
×
…
M
n
M = M_1 × M_2 × … M_n
M=M1×M2×…Mn , 则用
n
n
n 片计数器分别组
成
M
1
M_1
M1,
M
2
M_2
M2 …
M
n
M_n
Mn 进制计数器 , 然后再将它们 级联 而成。
级联方法:
- 并行进位法:所有芯片共用一个时钟信号,低位芯片的进位输出控制相邻高位芯片的使能端(同步方式);
- 串行进位法:低位芯片的进位输出作为相邻高位芯片的
CP(异步方式);适合74LS193.
b. 扩展法
先将 n n n 片计数器 级联 组成最大计数值 N > M N>M N>M的计数器 , 然后采用 整体清0 或 整体置数 的方法实现模 M M M 计数器 。
例. 用74LS193设计一个
256
256
256 进制的计数器。
分析:74LS193是
16
16
16 进制计数器,两片74LS193级联可以实现
256
256
256 进制计数器。
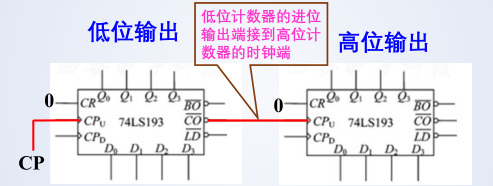
当低位计数器计数为
1111
1111
1111 时,低位计数器的进位输出端产生一个低电平脉冲信号;当下一个时钟脉冲上升沿到来时,低位计数器的进位输出端变为高电平值,相当于高位计数器的时钟端有一个上升沿,高位计数器计数增加
1
1
1 。
二、寄存器
1. 寄存器概念和分类
和计数器一样,寄存器也是时序逻辑电路的最常见的应用之一。
寄存:把二进制数据或代码暂时存储;
功能特点:暂存数据或代码,一般不对存储内容进行处理;
结构特点:通常由
D
D
D 触发器构成;
分类:
- 基本寄存器(数码寄存器)
- 移位寄存器
输入输出方式:
- 并行方式:每一位数据对应一个输入端/输出端,在 C P CP CP 作用下,各位同时输入/输出;
- 串行方式:只有一个输入端/输出端, C P CP CP 作用下,各数码逐位输入/输出。
2. 基本寄存器结构和功能
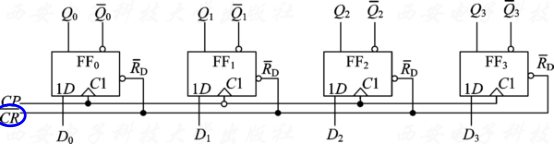
右图是具有异步清零端的基本寄存器。
功能说明:
- 当 C R ‾ = 0 overline {CR} = 0 CR=0 时,寄存器清零: Q 3 n + 1 Q 2 n + 1 Q 1 n + 1 Q 0 n + 1 = 0000 Q^{n+1}_3Q^{n+1}_2Q^{n+1}_1Q^{n+1}_0 = 0000 Q3n+1Q2n+1Q1n+1Q0n+1=0000;
- 当
C
R
‾
=
1
overline {CR} = 1
CR=1 时,时钟脉冲
CP上升沿到来,寄存器置数。加在并行数据输入端的数据 D 3 D_3 D3 ~ D 0 D_0 D0 ,就立即被送到触发器输出端, Q 3 n + 1 Q 2 n + 1 Q 1 n + 1 Q 0 n + 1 = D 3 D 2 D 1 D 0 Q^{n+1}_3Q^{n+1}_2Q^{n+1}_1Q^{n+1}_0 = D_3D_2D_1D_0 Q3n+1Q2n+1Q1n+1Q0n+1=D3D2D1D0 ; - 当 C R ‾ = 1 overline {CR} = 1 CR=1 时,除了时钟上升沿之外的其他时间,寄存器的状态保持不变。
3. 集成的基本寄存器
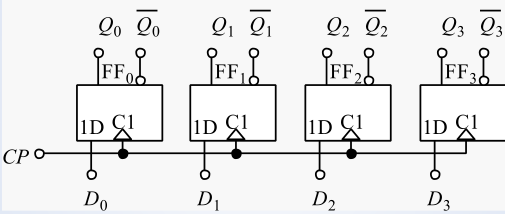
(1) 由多个边沿D触发器组成的集成寄存器
下图是
4
4
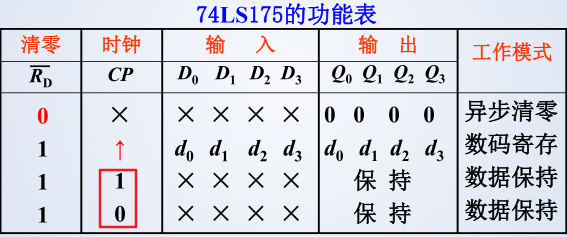
4 位上升沿集成触发器74LS175:
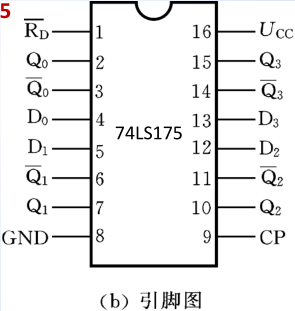
引脚说明:
- D 0 D_0 D0~ D 3 D_3 D3 :并行数据输入端
- Q 0 Q_0 Q0~ Q 3 Q_3 Q3 :并行数据输出端
- R D ‾ overline {R_D} RD :异步清零控制端
74LS175集成触发器,上升沿时送数,异步清零:
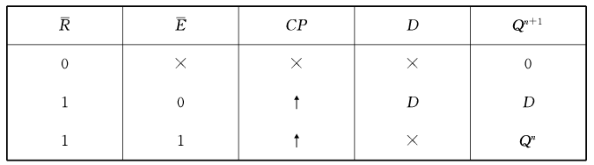
(2) 具有输入使能功能的锁存型寄存器
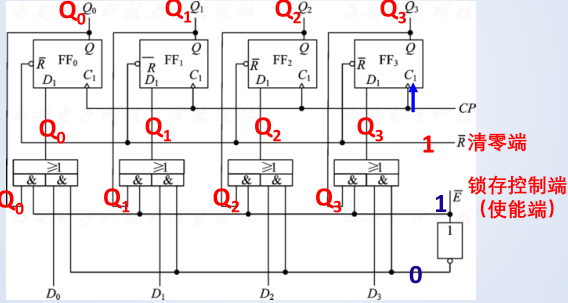
上图的集成寄存器在时钟上升沿锁存数据,其他时间保存数据;可以异步清零,可以使能。功能表如下:
(3) 具有输出缓冲功能的寄存器
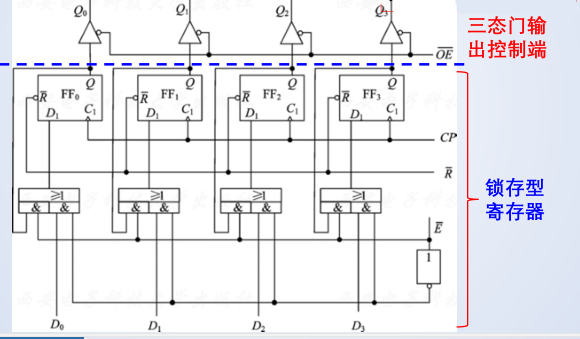
当 O E ‾ = 0 overline {OE}=0 OE=0 时,锁存在触发器的数据才会传到输出端。
4. 移位寄存器
移位: 将寄存器所存储的各位数据,在每个移位脉冲的作用下, 向左或向右移动一位。根据移位的方向,分成:左移、右移和双向移位。
(1) 单向移位寄存器
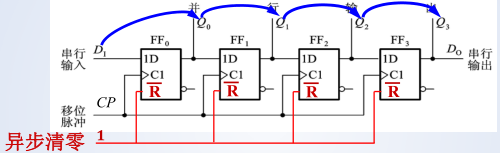
- D I D_I DI :串行数据输入端;
- D O D_O DO :串行数据输出端;
- C P CP CP :时钟端;
- Q 0 Q_0 Q0 ~ Q 3 Q_3 Q3 :并行数据输出端;
- R ‾ overline R R :异步清零端
触发器的驱动方程:
D
0
=
D
I
,
D
1
=
Q
0
n
,
D
2
=
Q
1
n
,
D
3
=
Q
2
n
D_0=D_I,D_1 =Q_0^n,D_2 =Q_1^n,D_3 =Q_2^n
D0=DI,D1=Q0n,D2=Q1n,D3=Q2n;
代入
D
D
D 触发器的特征方程:
Q
n
+
1
=
D
Q^{n+1} = D
Qn+1=D ;
得到:
Q
0
n
+
1
=
D
I
,
Q
1
n
+
1
=
Q
0
n
,
Q
2
n
+
1
=
Q
1
n
,
Q
3
n
+
1
=
Q
2
n
Q_0^{n+1} =D_I,Q_1 ^{n+1} =Q_0^n,Q_2^{n+1} =Q_1^{n} ,Q_3^{n+1} =Q_2^n
Q0n+1=DI,Q1n+1=Q0n,Q2n+1=Q1n,Q3n+1=Q2n
(2) 双向移位寄存器
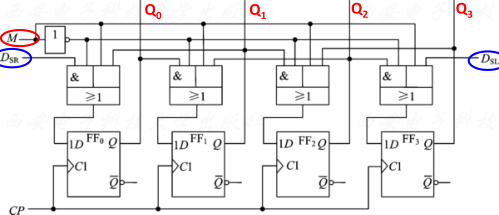
- 移位控制端: M M M
- 左移串行输入端: D S L D_{SL} DSL
- 右移串行输入端: D S R D_{SR} DSR
次态方程:
{
Q
0
n
+
1
=
M
‾
D
S
R
+
M
Q
1
n
Q
1
n
+
1
=
M
‾
Q
0
n
+
M
Q
2
n
Q
2
n
+
1
=
M
‾
Q
1
n
+
M
Q
3
n
Q
3
n
+
1
=
M
‾
Q
2
n
+
M
D
S
L
left { begin{aligned} &Q^{n+1}_0 = overline {M}D_{SR} + MQ^n_1\ &Q^{n+1}_1 = overline MQ^n_0 + MQ^n_2\ &Q^{n+1}_2 = overline MQ^n_1 + MQ^n_3\ &Q^{n+1}_3 = overline MQ^n_2 + MD_{SL} end{aligned} right.
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧Q0n+1=MDSR+MQ1nQ1n+1=MQ0n+MQ2nQ2n+1=MQ1n+MQ3nQ3n+1=MQ2n+MDSL
M
=
0
M=0
M=0 时,右移,
Q
0
n
+
1
=
D
S
R
,
Q
1
n
+
1
=
Q
0
n
,
Q
2
n
+
1
=
Q
1
n
,
Q
3
n
+
1
=
Q
2
n
Q_0^{n+1} = D_{SR},Q_1 ^{n+1} =Q_0^n,Q_2^{n+1} =Q_1^{n} ,Q_3^{n+1} =Q_2^n
Q0n+1=DSR,Q1n+1=Q0n,Q2n+1=Q1n,Q3n+1=Q2n;
M
=
1
M=1
M=1 时,左移,
Q
0
n
+
1
=
Q
1
n
,
Q
1
n
+
1
=
Q
2
n
,
Q
2
n
+
1
=
Q
3
n
,
Q
3
n
+
1
=
D
S
L
Q_0^{n+1} = Q^{n}_1,Q_1^{n+1} = Q_2^n,Q_2^{n+1} =Q_3^n,Q_3^{n+1} = D_{SL}
Q0n+1=Q1n,Q1n+1=Q2n,Q2n+1=Q3n,Q3n+1=DSL;
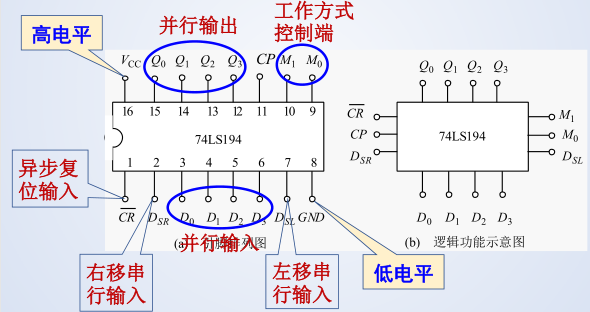
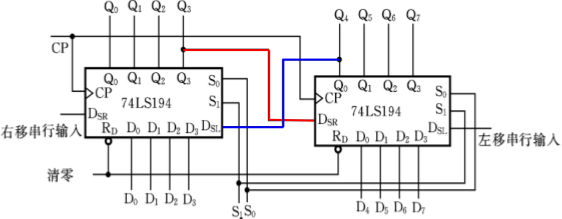
(3) 4位双向移位寄存器74LS194
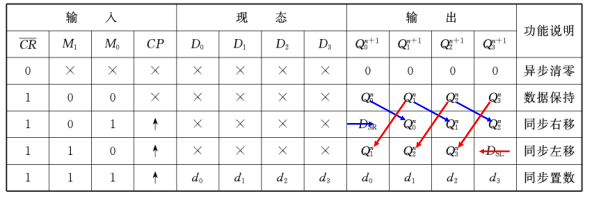
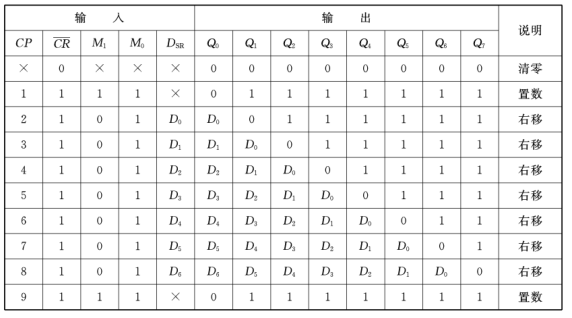
74LS194的逻辑功能表如下:
例. 利用两片集成移位寄存器74LS194扩展成一个
8
8
8 位移位寄存器
分析如下:
- 74LS194受统一的时钟脉冲控制, 8 8 8 位移位寄存器也应该同步运行;
- 74LS194的清零端应该一起接受控制;
- 工作方式控制段也应该统一被控制;
- 为了左移,必须将右边那片74LS194的
Q
4
Q_4
Q4 指向左边74LS194的
D
S
L
D_{SL}
DSL 输入端;同理可以右移:
(4) 移位寄存器的应用——实现数码串/并转换
串/并转换是指将串行输入的数据,经转换电路之后变成并行输出,常用于计算机通信中的数据接收方。
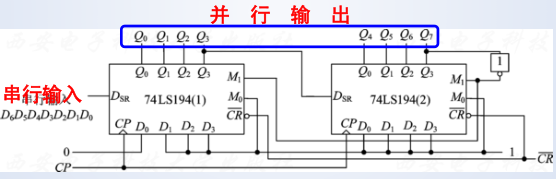
Step1:
C
R
‾
overline {CR}
CR 端加低电平,异步清零,
Q
7
=
0
,
M
1
M
0
=
11
Q_7 = 0,M_1M_0 = 11
Q7=0,M1M0=11 ,寄存器处于置数工作状态;

Step2:
C
R
‾
overline {CR}
CR 端加高电平,当第一个 CP 上升沿到来时,输出端:
Q
0
Q
1
Q
2
Q
3
Q
4
Q
5
Q
6
Q
7
=
01111111
Q_0Q_1 Q _2 Q_3 Q_4 Q_5 Q_6 Q_7 =01111111
Q0Q1Q2Q3Q4Q5Q6Q7=01111111 ,
Q
7
=
1
,
M
1
M
0
=
01
Q_7 =1,M_1 M_0 =01
Q7=1,M1M0=01 ,寄存器处于串行右移工作方式;
Step3:当第二个 CP 上升沿到来时,输出端数据右移
1
1
1 位:
Q
0
Q
1
Q
2
Q
3
Q
4
Q
5
Q
6
Q
7
=
D
0
0111111
Q_0 Q_1 Q_2 Q_3 Q_4 Q_5 Q_6 Q_7 =D_0 0111111
Q0Q1Q2Q3Q4Q5Q6Q7=D00111111 ,
Q
7
=
1
,
M
1
M
0
=
01
Q_7 =1,M_1 M_0 =01
Q7=1,M1M0=01 ,寄存器处于串行右移工作方式;
Step4:在后续的
6
6
6 个 CP 上升沿到来时,输出端数据依次右移
1
1
1 位:
Q
0
Q
1
Q
2
Q
3
Q
4
Q
5
Q
6
Q
7
=
D
6
D
5
D
4
D
3
D
2
D
1
D
0
0
Q_0 Q _1 Q_2 Q_3 Q_4 Q_5 Q_6 Q_7 =D_6 D_5 D_4 D_3 D_2 D_1 D_0 0
Q0Q1Q2Q3Q4Q5Q6Q7=D6D5D4D3D2D1D00 ,此时,串行输入的数据已被转换成并行输出。
数据串/ 并转换电路的逻辑功能表:
三、多谐震荡电路(补充)
1. 多谐振荡器
多谐振荡器是一种自激振荡器,在接通电源后,不需要外加触发信号,便能自动产生矩形脉冲。多谐振荡器在工作过程中没有稳定状态,故称为无稳态电路。
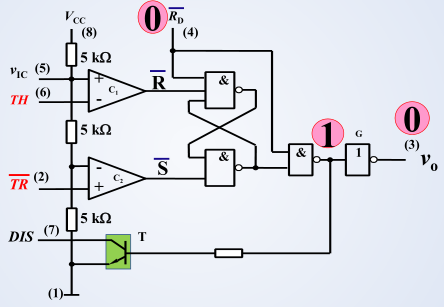
2. 555定时器
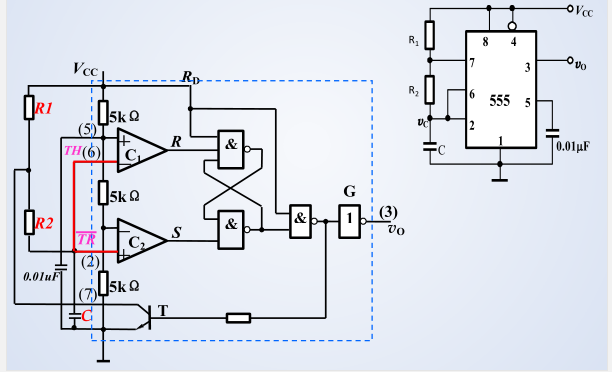
(1) 电路结构
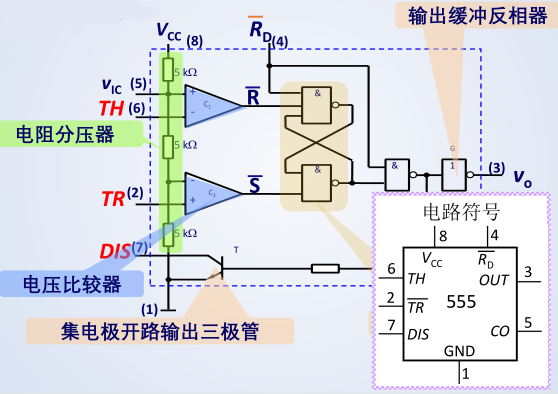
(2) 工作原理
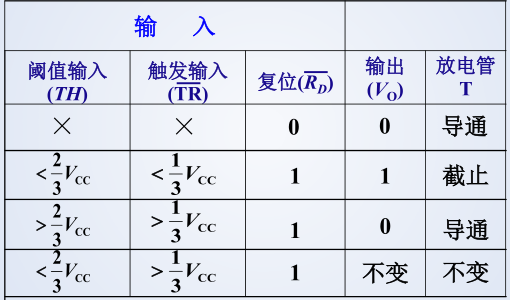
a.
R
D
‾
=
0
overline {R_D} = 0
RD=0 时,三极管导通:
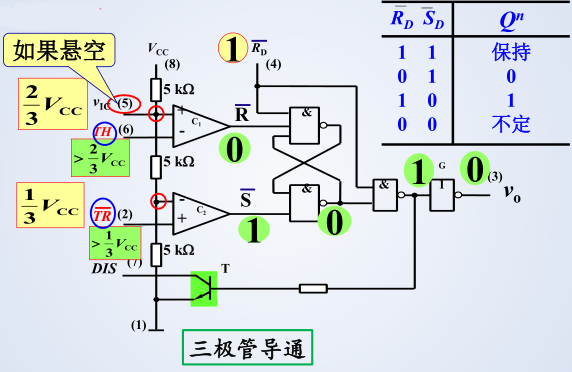
b.
R
D
‾
=
1
,
T
H
>
2
3
V
C
C
,
T
R
‾
>
1
3
V
C
C
overline {R_D} = 1,TH > {2over 3} V_{CC},overline {TR} > {1over 3} V_{CC}
RD=1,TH>32VCC,TR>31VCC时,
R
‾
=
0
,
S
‾
=
1
overline R = 0,overline S = 1
R=0,S=1,三极管导通:
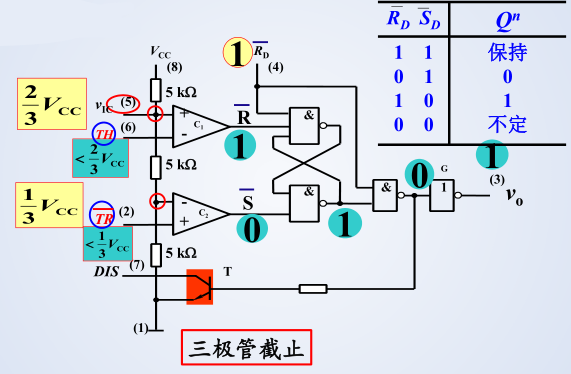
c.
R
D
‾
=
1
,
T
H
<
2
3
V
C
C
,
T
R
‾
<
1
3
V
C
C
overline {R_D} = 1,TH < {2over 3} V_{CC},overline {TR} < {1over 3} V_{CC}
RD=1,TH<32VCC,TR<31VCC时,
R
‾
=
1
,
S
‾
=
0
overline R = 1,overline S = 0
R=1,S=0,三极管截止:
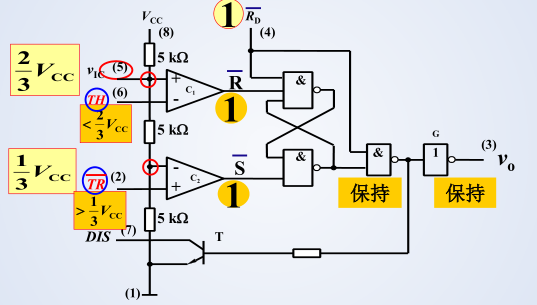
d.
R
D
‾
=
1
,
T
H
<
2
3
V
C
C
,
T
R
‾
>
1
3
V
C
C
overline {R_D} = 1,TH < {2over 3} V_{CC},overline {TR} > {1over 3} V_{CC}
RD=1,TH<32VCC,TR>31VCC时,
R
‾
=
1
,
S
‾
=
1
overline R = 1,overline S = 1
R=1,S=1,三极管保持:
e. R D ‾ = 1 , T H > 2 3 V C C , T R ‾ < 1 3 V C C overline {R_D} = 1,TH > {2over 3} V_{CC},overline {TR} < {1over 3} V_{CC} RD=1,TH>32VCC,TR<31VCC时, R ‾ = 0 , S ‾ = 0 overline R = 0,overline S = 0 R=0,S=0,无意义。
(3) 工作原理
功能表总结如下:
3. 用555定时器构成多谐振荡器
(1) 电路结构
(2) 工作原理
a. 第一暂稳态。接通
V
C
C
V_{CC}
VCC 后:
开始时
T
H
=
T
R
‾
=
u
C
≈
0
TH = overline {TR} = u_C approx 0
TH=TR=uC≈0 ,
u
O
u_O
uO 为高电平,放电管截止,
V
C
C
V_{CC}
VCC 经
R
1
,
R
2
R_1,R_2
R1,R2 向
C
C
C 充电 ,
u
C
u_C
uC 上升,这时电路 处于暂稳态
I
I
I 。
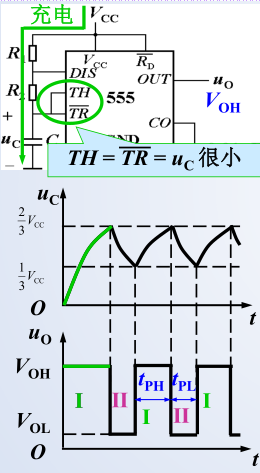
b. 第二暂稳态。当
u
C
u_C
uC 上升到
T
H
=
T
R
‾
=
u
C
≥
2
3
V
C
C
TH = overline {TR} = u_C ≥ {2 over 3} V_{CC}
TH=TR=uC≥32VCC 时,
u
O
u_O
uO 跃变为低电平,同时放电管
T
T
T 导通,
C
C
C 经
R
2
R_2
R2 和
T
T
T 放电,
u
C
u_C
uC 下降,电路进入暂稳态
Ⅱ
Ⅱ
Ⅱ 。
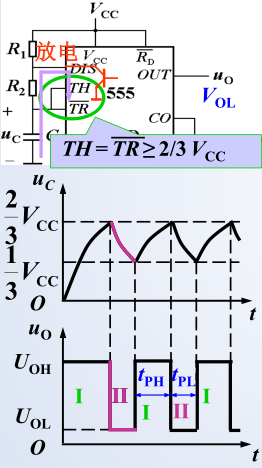
c. 第三暂稳态。当
u
C
u_C
uC 下降到:
T
H
=
T
R
‾
=
u
C
≤
1
3
V
C
C
TH = overline {TR} = u_C le {1 over 3} V_{CC}
TH=TR=uC≤31VCC 时,
u
O
u_O
uO 重新跃变为高电平,同时放电管
T
T
T 截止,
C
C
C 又被充电,
u
C
u_C
uC 上升,电路又返回到暂稳态
Ⅰ
Ⅰ
Ⅰ 。
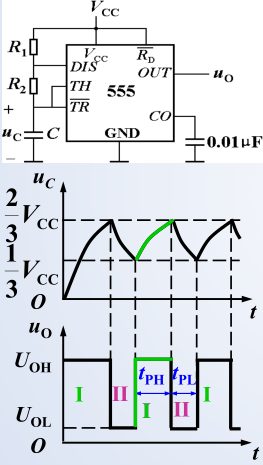
(3) 振荡频率计算
电容
C
C
C 如此循环充电和放电,使电路产生振荡,输出矩形脉冲。
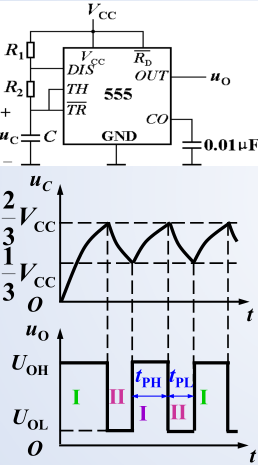
t
P
H
≈
0.7
(
R
1
+
R
2
)
C
t_{PH} approx 0.7(R_1 +R_2)C
tPH≈0.7(R1+R2)C
t
P
L
≈
0.7
R
2
C
t_{PL} approx 0.7R_2C
tPL≈0.7R2C
周期:
T
=
t
P
H
+
t
P
L
=
0.7
(
R
1
+
2
R
2
)
C
T = t_{PH} + t_{PL} = 0.7(R_1+2R_2)C
T=tPH+tPL=0.7(R1+2R2)C
频率:
f
=
1
(
t
P
L
+
t
P
H
)
≈
1.43
(
R
1
+
2
R
2
)
C
f = {1 over {(t_{PL} + t_{PH})}} approx {1.43 over (R_1 +2R_2)C}
f=(tPL+tPH)1≈(R1+2R2)C1.43
占空比:
q
=
t
P
H
T
=
R
1
+
R
2
R
1
+
2
R
2
q = {t_{PH} over T} = {{R_1+R_2}over {R_1 +2R_2}}
q=TtPH=R1+2R2R1+R2
最后
以上就是强健宝马最近收集整理的关于【数字逻辑】学习笔记 第五章 Part3 时序逻辑电路(常用时序逻辑电路及其应用)一、计数器二、寄存器三、多谐震荡电路(补充)的全部内容,更多相关【数字逻辑】学习笔记内容请搜索靠谱客的其他文章。








发表评论 取消回复