四、稳定的定义与代数稳定判据
4.1 稳定的基本概念和线性系统稳定的充要条件
- 稳定是控制系统的重要性能,也是系统能够正常运行和工作的首要条件。控制系统在实际应用中应用的首要前提就是系统必须稳定。对系统进行各类品质指标的分析也必须在系统稳定的前提下进行。
- 控制系统在实际运行过程中,总会受到外界和内部一些因素的扰动,例如负载和能源的波动、系统参数的变化、环境条件的改变等。这些因素总是存在的,如果系统设计时不考虑这些因素,设计出来的系统不稳定,那这样的系统是不成功的,需要重新设计,或调整某些参数或结构。
- 如果系统不稳定,就会在任何微小的扰动作用下偏离原来的平衡状态,并随时间的推移而发散。因此,如何分析系统的稳定性并提出保证系统稳定的措施,是自动控制理论的基本任务之一。
- 其他:一个反馈条件要么是稳定的,要么是不稳定的---绝对稳定性。具有绝对稳定性的系统称为稳定系统;若一个闭环系统是稳定的,还可以用相对稳定性来进一步衡量其稳定程度。例如:飞机越稳定操作起来越困难。但是现代战斗机的相对不稳定性导致的结果就是良好的可操纵性,因此战斗机不如商业运输机飞行平稳,但是能够实现快速机动。
4.2 稳定的基本概念
定义1:系统处于某一起始的平衡状态。在外界扰动作用的影响下,偏离了该平衡状态。当外作用消失后,如果经过足够长的时间,这个系统还能恢复到原来的起始平衡状态,则称这样的系统为稳定的系统。否则为不稳定的系统。
不稳定的例子:
1. 演播室音响系统的扬声器与麦克风之间的距离越近,回音越大,近到一定程度,啸叫盖过音响;(类似的现象还有电话机、电脑的麦克风等等);
稳定性反映在干扰消除之后过渡过程的性质上,系统与平衡状态的偏差可以认为是系统的初始偏差。
定义2:若控制系统在足够小的初始偏差作用下,其过渡过程的偏差随时间的推移逐渐趋于零,也即系统具有恢复原来平衡状态的能力,则称系统是稳定的;否则不稳定。
判断方法:判断传递函数的所有极点是否均位于左半平面,或等价地,判断系统矩阵
的特征值是否均位于
左半平面。若所有极点(或特征值)均位于
左半平面,就可以进一步通过极点(或特征值)的相对位置来判断相对稳定性。
注意事项:
1.稳定性是控制系统自身的固有性质,这稳定性取决于系统的固有特征(结构、参数),与系统的输入信号无关;
A:对线性系统,系统是大范围稳定的(与输入偏差无关);
B:对实际“小偏差线性化”的近似线性系统,偏差达到一定范围后,系统不再稳定。
2.稳定性指的是自由震荡之下的稳定性,即输入为零,系统在初始偏差不为零时的稳定性;也即是讨论自由振荡是收敛还是发散。
4.3 系统稳定的充要条件
设系统或环节的微分方程为:
式中:——输入,
——输出,
;
为常系数。
将上式求拉式变换,得:
即有:
扰动信号的作用相当于对系统的一个脉冲响应信号,系统的输出增量(偏差值)即是脉冲输入的响应
。
对于具有以上传递函数的控制系统来说,脉冲输入的拉式变换为1,即,所以系统输出增量的拉式变换为:
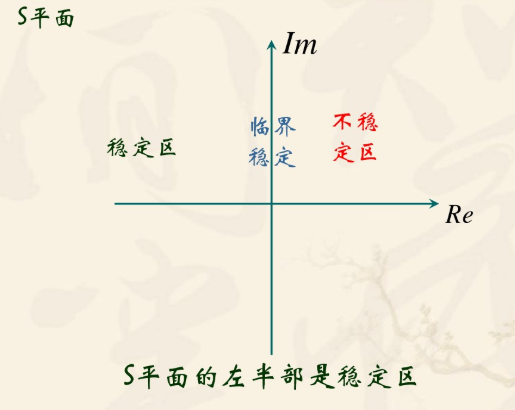
线性系统稳定的充要条件:
系统特征方程的根(即传递函数的极点)全为负实数或具有负实部的共轭复根。或者说,特征方程的根应全部位于左半平面。
- 如果特征方程中有一对实部为正的共轭复根,它的对应项是发散的周期振荡;
- 如果特征方程中有一个正实根,它所对应的指数项将随时间单调增长。
上述两种情况下系统是不稳定的。
- 如果特征方程中有一个实根,它所对应于一个常数项,系统可在任何状态下平衡,称为随遇平衡状态;
- 如果特征方程中有一对共轭虚根,对应于等幅的周期振荡,称为临界平衡状态(或临界稳定状态)。
从控制工程的角度认为临界稳定状态和随遇平衡状态属于不稳定。
注意:
稳定性是线性定常系统的一个属性,只与系统本身的结构参数有关,与输入输出信号无关,与初始条件无关;只与极点有关,与零点无关。
1.对于一阶系统:
,
只要都大于零,系统就是稳定的。
2.对于二阶系统:
,
只有都大于零,系统才稳定(负实根或实部为负)。
对于三阶或以上系统,求根是很繁琐的。于是就有了以下的代数稳定性判据。
4.4 代数稳定性判据
4.4.1 劳斯稳定性判据
设线性系统的闭环特征方程为:
则该系统稳定的条件为:
a.特征方程的各项系数都不等于零;
b.特征方程的各项系数的符号都相同。
此两项为必要条件。
例如:
充分条件:由特征方程系数组成的劳斯排列阵的第一列的所有项均为正。
充要条件:对于稳定系统而言,劳斯排列阵的第一列中,应该没有符号变化。
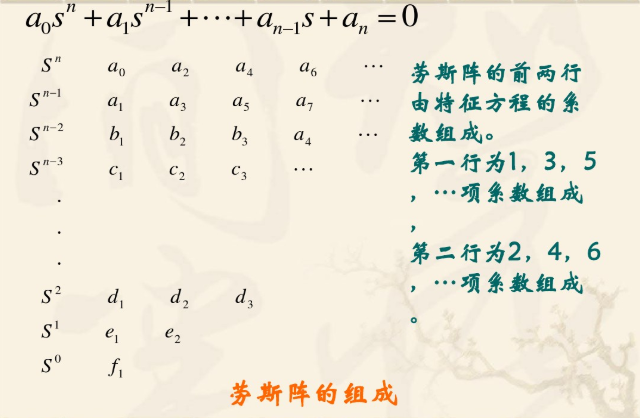
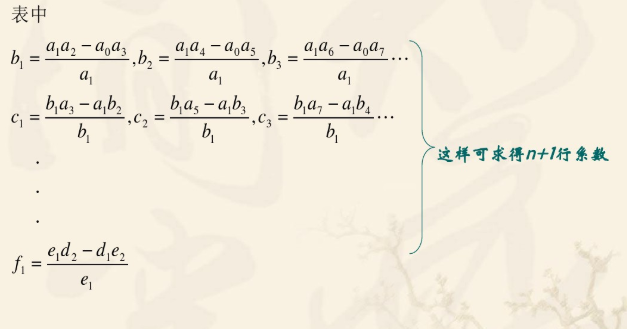
这种过程需一直进行到第n行被算完为止,系数的完整阵列呈现一个倒三角形。
注意:
为简化计算,可用一个正整数去除或乘某一整个行,并不改变稳定性结论。
劳斯稳定判据:
劳斯稳定判据是很根据所列劳斯表第一列系数符号的变化,去判别特征方程式根在平面上的具体分布,过程如下:
- 如果劳斯表中第一列的系数均为正值,则其特征方程式的根都在
的左半平面,相应的系统是稳定的。
- 如果劳斯表中第一列系数的符号有变化,其变化的次数等于该特征方程式的根在
具体劳斯-赫尔维茨稳定性判据链接可以参考如下链接:https://wenku.baidu.com/view/e5fb484f6ad97f192279168884868762cbaebb17.html
最后
以上就是舒心小松鼠最近收集整理的关于机器人动力学与控制学习笔记(四)————控制系统的稳定性分析四、稳定的定义与代数稳定判据的全部内容,更多相关机器人动力学与控制学习笔记(四)————控制系统内容请搜索靠谱客的其他文章。








发表评论 取消回复