目录
????1 概述
????2 运行结果
????3 参考文献
????????4 Matlab代码
????1 概述
水下机器人-机械手系统(Underwater vehicle-manipulator systems, UVMS)可以完成除观测之外的水下采样、抓取、操作等任务,在海洋科学考察、海洋工程等领域得到广泛应用。通过对近年来国内外UVMS的研究现状进行综述,介绍了不同的UVMS本体结构与机械手构型,总结了UVMS的运动学、动力学和水动力学的建模方法,分析了人机交互式遥控操作控制方式,针对UVMS的自主控制中的运动规划、位置与轨迹跟踪、独立与协调控制、运动补偿控制、力/位置混合控制、视觉伺服控制等问题做了分类阐述。
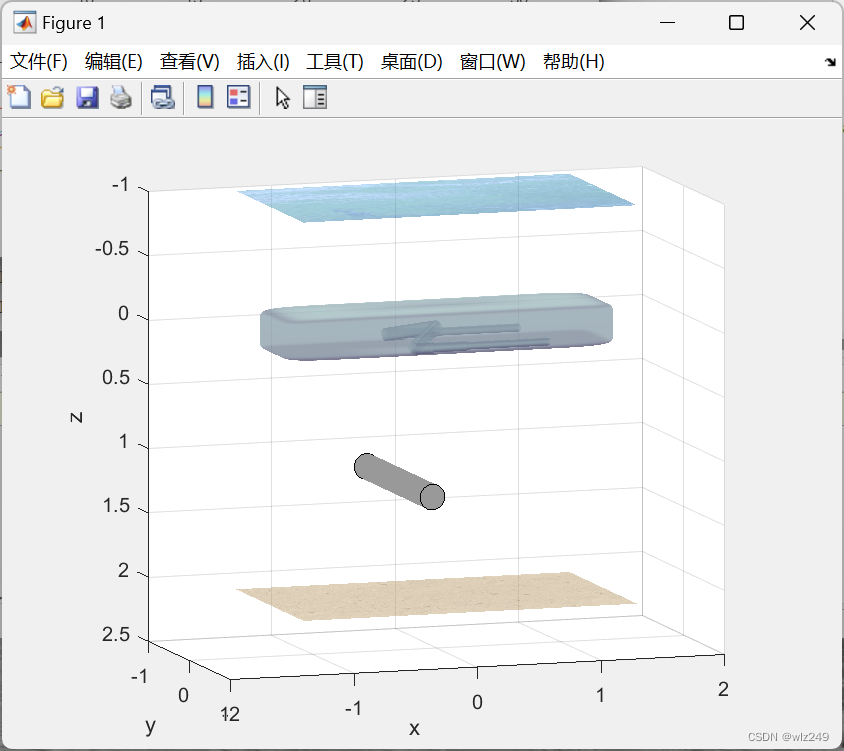
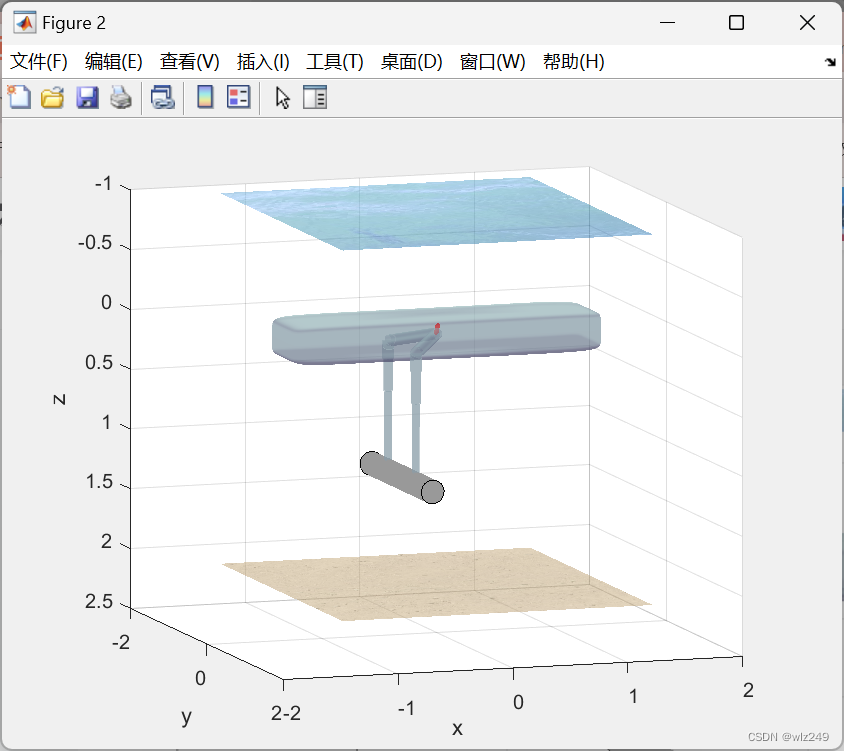
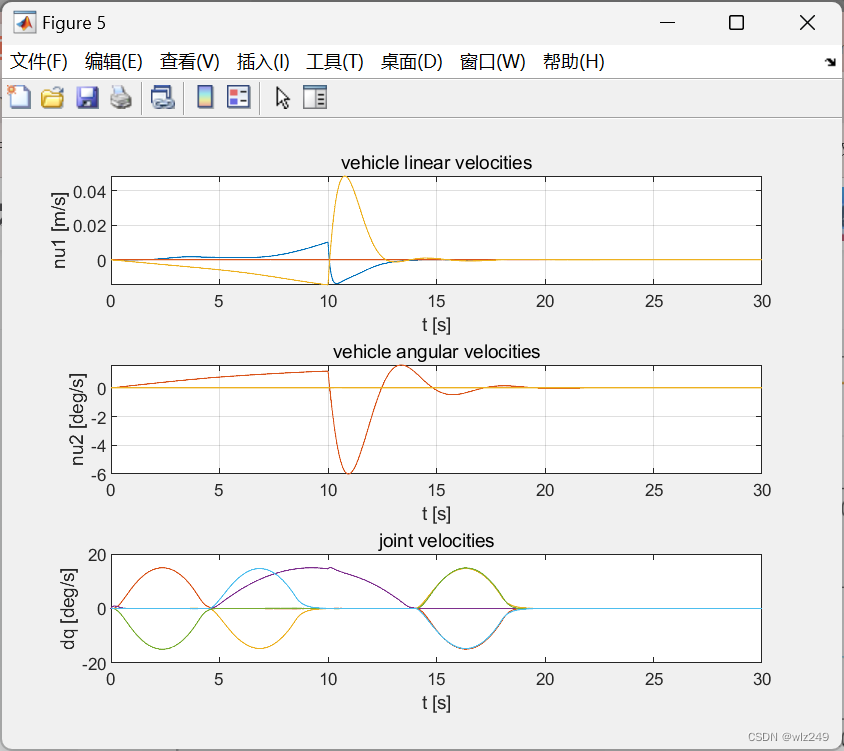
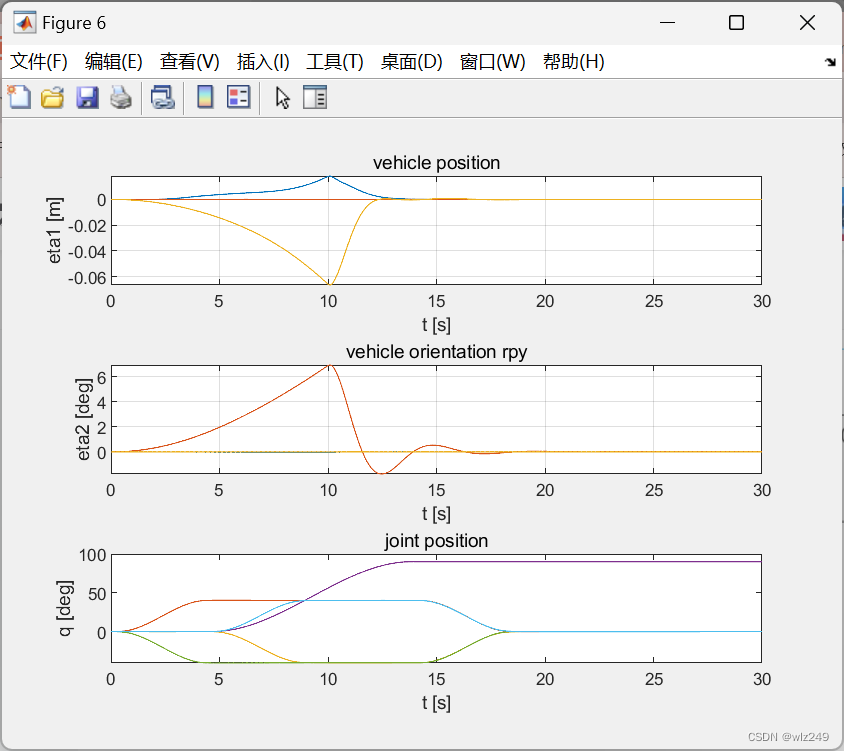
该项目体现UVDMS(水下机器人双机械手系统)上的运动学、动力学和控制模拟器。采用DH法建立运动学模型,并使用牛顿-欧拉法建立动力学模型。该项目为UVDMS的水下抓取操作提供了一个演示。
????2 运行结果
????3 参考文献
[1]常宗瑜,张扬,郑方圆,郑中强,王吉亮.水下机器人-机械手系统研究进展:结构、建模与控制[J].机械工程学报,2020,56(19):53-69.
????????4 Matlab代码
主函数部分代码:
clc
fprintf('n ----------------')
fprintf('n ----------------')
fprintf('n -- SIMURV 4.0 --')
fprintf('n ----------------')
fprintf('n ----------------')
% take path and "now" to store data
mypath = pwd;
prefix = datestr(now,30);
% ---------------------------------------------------
% load the model and copy the m-file in the folder output
% ---------------------------------------------------
cd data
if (exist('model_name','var')==0)
model_name = uigetfile('data*.m', 'select a model to simulate');
end
model_copy = strcat(mypath,filesep,'output',filesep,prefix,model_name);
copyfile(model_name,model_copy);
eval(strrep(model_name,'.m',''));
fprintf('nmodel copied in %s',[filesep,'output',filesep,prefix,model_name]);
cd ..
% ---------------------------------------------------
% output name to be copied in the folder output
% ---------------------------------------------------
% output_name = strcat(mypath,filesep,'output',filesep,prefix,'out.mat');
% fprintf('noutput will be copied in %s',[filesep,'output',filesep,prefix,'out.mat']);
output_name = strcat('demo',prefix,'out.mat'); % 2020.2.6
fprintf('noutput will be copied in %s',[filesep,'output',filesep,prefix,'out.mat']);
% ---------------------------------------------------
% run the "core" simulation file and copy the m-file in the folder output
% ---------------------------------------------------
cd func
if (exist('core_simulator_name','var')==0)
core_simulator_name = uigetfile('core*.m', 'select the core simulation file');
end
core_simulator_copy = strcat(mypath,filesep,'output',filesep,prefix,core_simulator_name);
copyfile(core_simulator_name,core_simulator_copy);
fprintf('ncore_simulator in %s',[filesep,'output',filesep,prefix,core_simulator_name]);
eval(strrep(core_simulator_name,'.m',''));
cd ..
% ---------------------------------------------------
% save simulation output in a mat file
% ---------------------------------------------------
cd output
eval(['save ',output_name]);
cd ..
% ---------------------------------------------------
% warning for too much files in the output dir
% ---------------------------------------------------
file_number = size(dir('output'),1)-2;
if file_number>30
fprintf('n %d files are currently stored in the output folder, consider erase some',file_number);
fprintf('n to erase all type: delete output/2*');
end
% ---------------------------------------------------
% exiting stuff
% ---------------------------------------------------
fprintf('nn to run another simulation with same model and controller type: simurv[enter]');
fprintf('n to modify the model type: clear model_name, simurv[enter]');
fprintf('n to modify the controller type: clear core_simulator_name, simurv[enter]');
fprintf('nn');
clear mypath prefix model_copy core_simulator_copy
最后
以上就是诚心服饰最近收集整理的关于水下机器人双机械手系统动态建模与控制仿真(Matlab代码实现)的全部内容,更多相关水下机器人双机械手系统动态建模与控制仿真(Matlab代码实现)内容请搜索靠谱客的其他文章。


![matlab simulink 3d,[原创]利用Matlab绘制3D文字](https://www.shuijiaxian.com/files_image/reation/bcimg22.png)





发表评论 取消回复