- 利用Simulink ROS ToolBox工具箱建立ROS程序模型时,ROS消息以BUS的形式进行数据传递,并且对于ROS消息中的不定长数组
[],在BUS中将被表示为定长数组,BUS中相应的定长数组长度可以修改。当定长数组的长度大于消息中的原数组长度时,数组后续多余的部分均和原不定长数组的最后一个有效元素数据相同。 - 经测试可得,利用S-Function Builder无法以嵌套的BUS作为输入。
- 在Simulink模型中打开“Manage Array Sizes for ROS Messages”配置工具的方法:
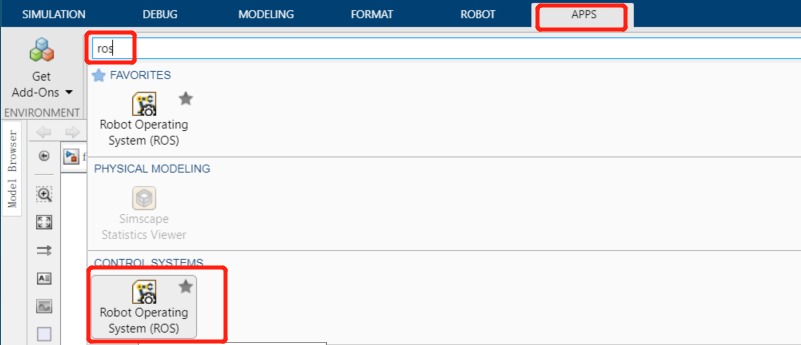
(1)在Simulink界面进入“APPS”菜单选择下拉框,输入“ros”查询,并打开搜索得到的“Robot Operating System(ROS)”。
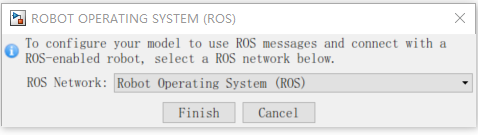
(2)选择恰当的“ROS Network”类型(ROS或ROS2),并点击“Finish”。
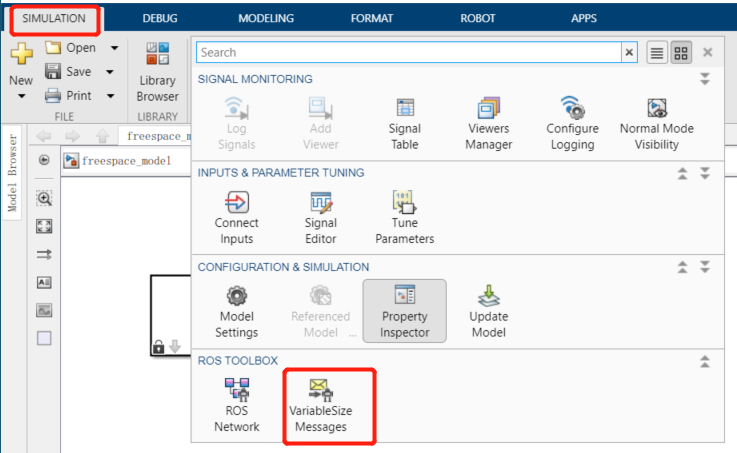
(3)再在Simulink的“SIMULATION”界面中的“PREPARE”部分选择下拉框,即可看到ROS TOOLBOX部分中的“VariableSize Messages”工具,如下图所示。点击该工具,即可打开“Manage Array Sizes for ROS Messages”配置工具对话框。
最后
以上就是机灵彩虹最近收集整理的关于ROS程序Simulink建模简单小结的全部内容,更多相关ROS程序Simulink建模简单小结内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复