上一教程是控制仿真的机械臂(教程连接:http://t.csdn.cn/5T86c),这个教程是第三种环境,也就是:电脑两台,实体机械臂一台:Ubuntu18.04+ROS-melodic(ROSPC)和Windows10+RobotStudio6.07(ROBOTPC),ABB实体机械臂。
注意!!!ROSPC与ROBOTPC可以是同一台电脑,也就是上一个教程里的环境4,即:一台电脑安装两个系统或者Windows下装虚拟机。
!!!重要!!!实体机器人的控制器里必须要有616-1 PC接口和623-1多任务
上教程!!!!!!
一、将ROBOTPC与机械臂用网线连接(我连的是X2(service))
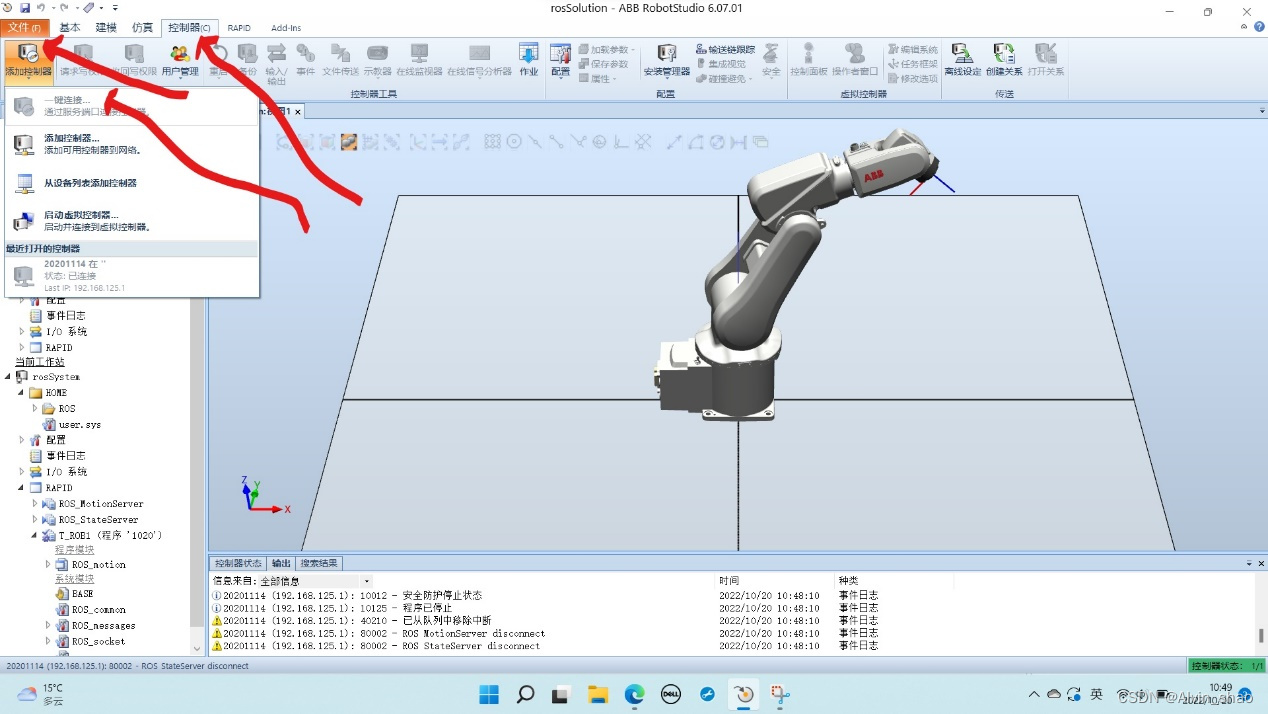
2.打开robot studio,点击控制器,再点击添加控制器,最后点击意见连接,这样机械臂和robot studio就连接上了,控制器的名字后会有机械臂的IP。
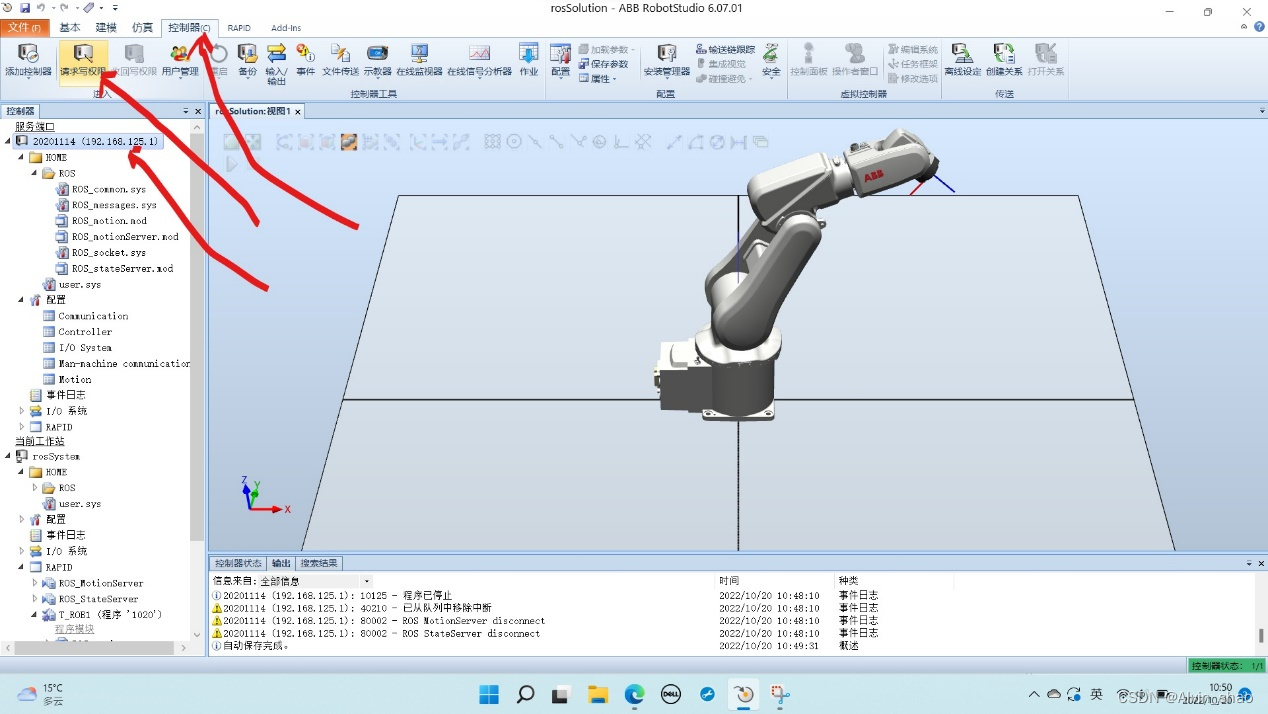
3.打开写入权限
先点击实体控制器,再点击请求写权限,然后在示教器上点击同意
4.之后的操作就是和我的上一个教程的步骤一样了,在HOM文件夹下建立一个ROS文件夹,再把那六个文件复制进来,最后配置那四个步骤。
注意!!!!此时修改ROS_socket.sys文件的IP时是写入机械臂的IP。

二、Ubuntu的步骤和上一个教程一样。
三、将ROSPC连接机械臂并运行!!!
1.将ROBOTPC的网线拔下来插到ROSPC上
2.在Ubuntu端,在ABB机器人的工作空间下打开终端输入:
roslaunch abb_irb120_moveit_config moveit_planning_execution.launch sim:=false robot_ip:= 192.168.x.xxx
其中IP那块就写实体机械臂的IP地址!!
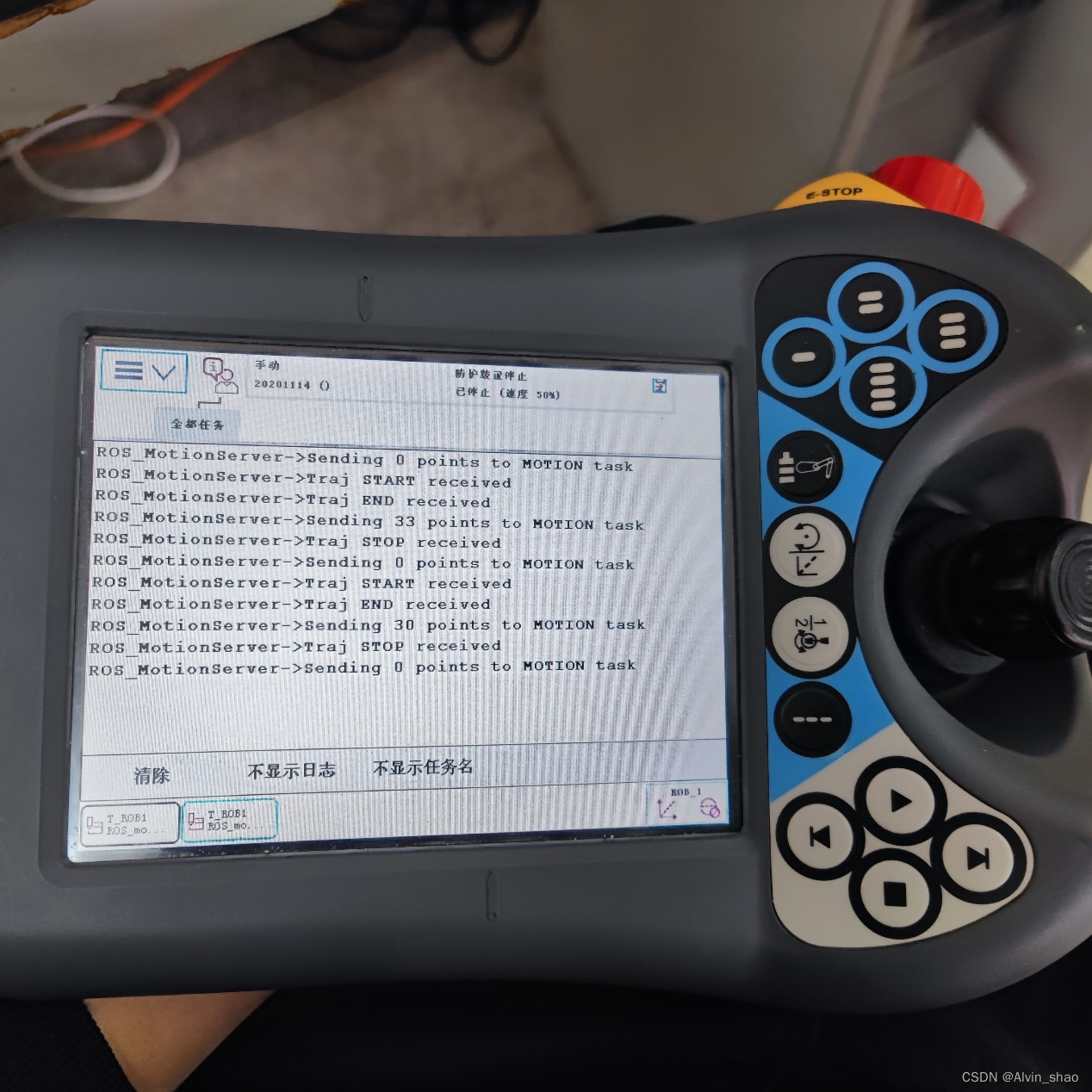
然后就大功告成了,大家请看我的视频:
(【Ubuntu系统下使用ROS(moveit )连接ABB实体机器人(irb120)实体!!!】 https://www.bilibili.com/video/BV13K411D7ba?share_source=copy_web&vd_source=66955823a6c8b76ecbf18611feb3d4c8)
最后
以上就是背后鸵鸟最近收集整理的关于Ubuntu系统下使用ROS(moveit )连接ABB实体机器人(irb120)(2控制实体)的全部内容,更多相关Ubuntu系统下使用ROS(moveit内容请搜索靠谱客的其他文章。








发表评论 取消回复