最早接觸的仿真軟件應該是Matlab,10多年前用過的版本是6.5和7.0,那是Matlab的安裝包還不到1GB。用作控制理論的仿真工具,和Matlab6.5同期的編程軟件是VC6.0,還時常想起神奇的MFC,皆成往事。這麼多年過去,最常用的通訊依然如故,以串口和socket爲主,I2C SPI CAN也經常用到。
現在的機器人仿真軟件基本都是跨平臺的了,如同編程語言一樣,Windows,Linux和MacOS,都可以使用C++ Java Python。
維基百科不錯的,如果想最快的了解一款仿真軟件,可以在其中查詢。Wikipedia
機器人仿真軟件匯總比較 Robotics simulator
這裏推薦免費的機器人仿真軟件:V-Rep:http://www.coppeliarobotics.com/downloads.html
支持主流平臺,有豐富的外部接口,V-REP是机器人仿真中的瑞士军刀:不会找到比它更多的功能,特点,或更复杂的API模拟器。
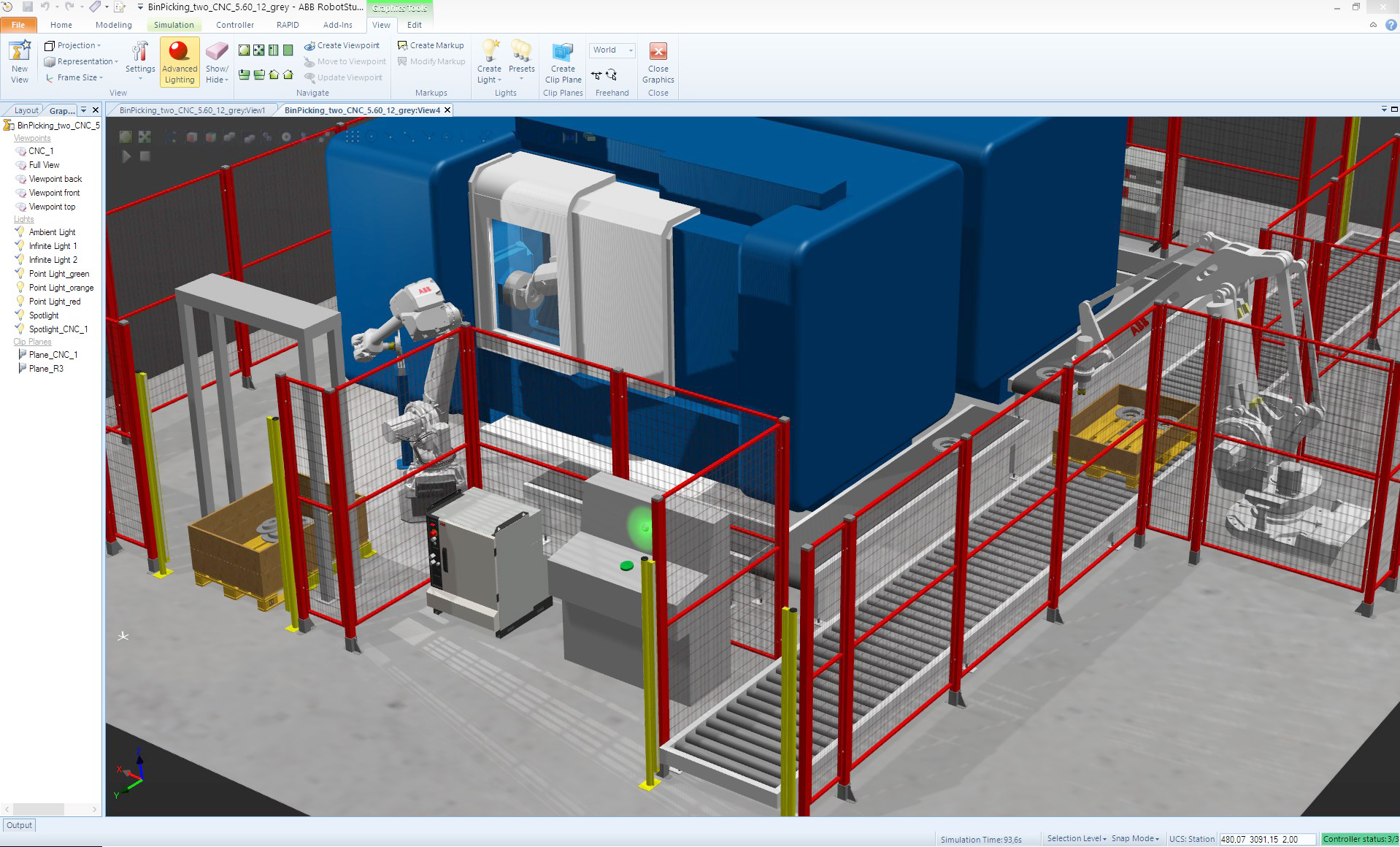
机器人模拟V-REP,集成开发环境,是基于分布式控制结构:每个对象/模型可以通过内嵌的脚本,插件,一个ROS节点,远程API客户端,或定制的解决方案可以单独控制。这使得V-REP用途很广,适用于多机器人应用。控制器可以用C / C ++,Python和Java的,Lua,MATLAB,Octave ,Urbi,V-REP用于快速算法开发,工厂自动化仿真,快速原型设计和验证,相关的教育机器人,远程监控等。Webots也不錯,但是收費。工業機器人一般而言都會獨立開發對應的仿真軟件比如ABB公司的RobotStudio®。
MORSE也挺獨特的,MORSE is an generic simulator for academic robotics. It focuses on realistic 3D simulation of small to large environments, indoor or outdoor, with one to tenths of autonomous robots.
http://www.openrobots.org/morse/doc/stable/morse.html


V-Rep,MORSE和Gazebo都支持Ubuntu和ROS,非常易於使用,並且目前都在持續更新中。
現在最多使用的還是RDS(Microsoft Robotics Developer Studio)和ROS(Robot Operating System)。
下面對比一下這兩款軟件中最常見的機器人:
實物(2010 VS 2015):

仿真環境(RDS 2010 vs Gazebo 2015):

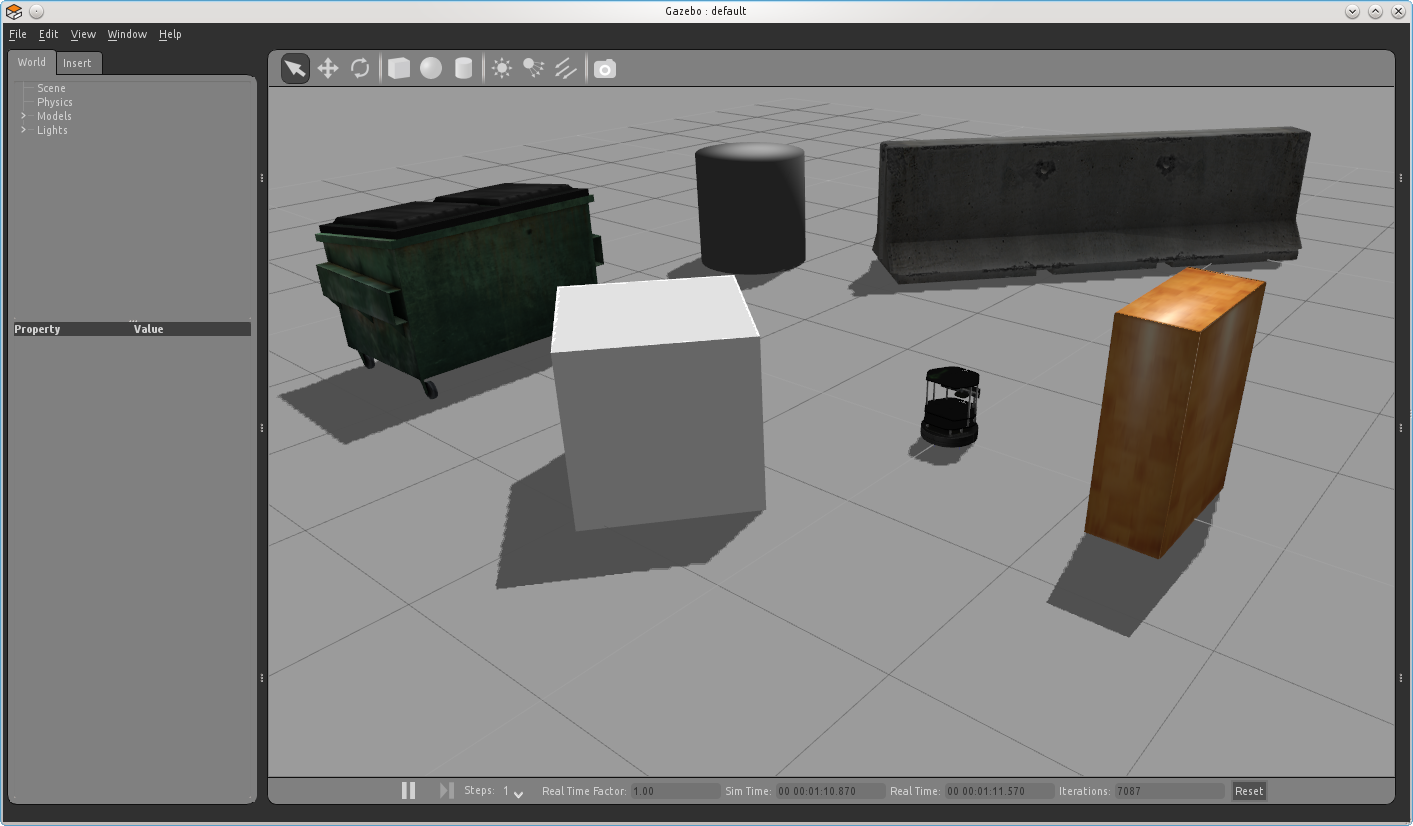
使用體驗是Gazebo佔用資源明顯比MVSE大很多。很可惜,RDS似乎在2012年就停止更新了。
(Is this still a project that is alive or is it dead? Yep, I think it's dead. No support, no nothing. )
最後,附上一些RDS的資料,RDS文檔大量學習,對我使用ROS幫助還是比較大的,原來的Player/Stage/Gazebo,也漸漸變成ROS/Gazebo。
安裝說明視頻教程:http://pan.baidu.com/s/1nusfhyT
MSRDS参考资料汇总:http://pan.baidu.com/s/1qXFq9fm
推薦快速上手RDS的一個網站:http://www.helloapps.com/
codeplex:
1 MRDS Samples:http://mrdssamples.codeplex.com/
2 MRDS Kinect Camera Sample Utilites:http://mrdskinectcam.codeplex.com/
3 Professional MRDS:http://promrds.codeplex.com/
ABB:
1 Download ABB Connect for Microsoft Robotics Developer Studio 2008 R3
最后
以上就是健壮乌龟最近收集整理的关于機器人仿真與控制學習小結的全部内容,更多相关機器人仿真與控制學習小結内容请搜索靠谱客的其他文章。








发表评论 取消回复